
基于ARM的多模式智能控制嵌入式系统设计*
2016-08-11 06:59陆兴华范太霖谢振汉
计算机与数字工程 2016年4期
陆兴华 范太霖 谢振汉
(广东工业大学华立学院 广州 511325)
基于ARM的多模式智能控制嵌入式系统设计*
陆兴华范太霖谢振汉
(广东工业大学华立学院广州511325)
摘要多模式智能控制系统在远程智能家居控制、机电控制等领域具有较大的应用前景,传统的多模式智能控制系统采用Android嵌入式设计方法,对I/O接口的控制信号调理性能不好。提出一种基于ARM的多模式智能控制嵌入式系统设计方法。首先进行了多模式智能控制系统的总体设计和功能模块分析,采用ADI公司的ARM11作为系统控制的主控系统,采用WiFi或者GPRS通信进行数据传输和控制指令输出,结合PID神经网络控制算法进行多模式控制程序加载,对控制系统的功能模块进行硬件电路设计,系统调试中用嵌入式AD9850进行控制系统的AD转换和数据采样调试。仿真结果表明,采用该系统进行多模式远程智能控制,具有较好的控制精度,实时性和收敛性较好,性能可靠稳定。
关键词ARM; 智能控制; 嵌入式; 系统设计
Class NumberTP273
1 引言
随着计算机网络技术和信息处理技术的发展,远程自动控制系统广泛应用在现代工业生产和生活当中,远程智能控制系统由原来的单一模式转化为多模式,通过多模式智能控制,为控制对象提供多功能的遥控操作。多模式智能控制建立在物联网和多传感器网络的基础上,通过传感器网络和射频识别RFID技术进行数据采样分析,生成控制指令,然后通过主控系统进行程序加载,对远程控制对象进行多模式操控,实现智能控制,而今,多模式智能控制系统广泛应用在智能家居控制、远程监测、目标识别和人工智能等领域,随着嵌入式技术的发展,多模式控制系统趋于集成化和智能化,研究多模式智能控制的嵌入式系统设计方法,在实现人工智能控制中具有重要意义[1]。
传统方法中,对多模式智能控制系统采用Android嵌入式设计方法,对I/O接口的控制信号调理性能不好,对此,相关文献进行了改进设计,其中,文献[3]提出一种基于WiFi或者GPRS通信接口设计和PID模糊神经网络控制的人工智能控制系统设计方法,实现对机器人的多模式控制[2],采用ARM寻址技术进行状态特征识别,提高了控制性能,但是该系统的集成性不好,采用分立元件设计导致系统的可靠性不高[3]。文献[4]提出一种基于Android嵌入式系统设计远程多模式压缩机控制系统,采用AD7656驱动住控系统的控制程序,结合智能粒子群控制算法实现远程控制,提高了控制性能,但是该系统在程序的ad7656_ioctl配置过程中对先验知识的依赖性较大,受到的干扰较强,性能不好。针对上述问题,本文采用嵌入式系统设计方法,提出一种基于ARM的多模式智能控制嵌入式系统设计方案,首先进行了多模式智能控制系统的总体设计和功能模块分析,结合PID神经网络控制算法进行多模式控制程序加载,然后进行了控制系统的功能模块的硬件部分设计,最后基于Linux进行系统仿真实验,展示了本文控制系统在实现多模式状态监测和控制中的优越性能。
2 多模式智能控制系统总体设计及算法描述
2.1多模式智能控制系统总体设计
多模式控制系统采用ARM作为核心控制单元,实现对远程终端的状态监测和多模态跟踪控制,在设计多模式智能控制系统之前首先进行系统的总体结构描述,本文设计的多模式智能控制系统采用模块化平台设计,主要分为多模态状态监测的传感器模块和通信模块、供电没款、上位机通信模块、数据信息处理模块和DSP数字号处理模块,其中DSP(数字信号处理器)是系统的核心,采用ADI公司的ARM11作为系统控制的主控系统,采用WiFi或者GPRS通信进行数据传输和控制指令输出,采用液晶显示实现人机交互,采用ADI公司的实现系统的供电[5~7],得到本文设计的多模式智能控制系统总体结构框图如图1所示。
在上述控制系统总体设计的基础上,进行功能模块分析,进行功能模块分析和设计指标描述,本文设计的基于ARM的多模式智能控制嵌入式系统主要数据采集和AD转换功能、远程测量和校准换能功能、收发转换功能以及控制信号的功率放大功能。其中,数据采样功能是实现多模式远程智能控制的基础,设计多模式智能控制系统的WSN传感器AD采样电路,多模式智能控制系统采用无线传感器进行远程数据采样,为了实现采样传感器节点的功率分配均衡,在AD采样过程中,采用AD9225进行模拟电路设计,电源输入为一个微分晶振电路,采用分立元件构成,使用ADM706S精确监控系统5V电源,在1.6s内进行电路复位,复位电路是一个DSP系统,从外部16位存储器直接执行ROM配置,远程多模式智能控制的WSN传感器分布簇Ci由一组节点构成[8~10],本系统就可以完成远程数据测量和控制收发转换等工作,根据上述分析,得到本文设计的系统的技术指标描述如下:
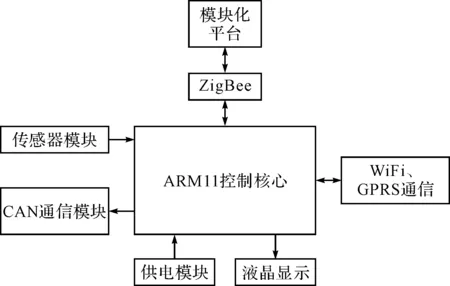
图1 多模式智能控制系统的总体结构框图
1) 多模式远程控制的控制指令收发的预处理机动态范围:-20dB~+20dB,PCI总线的抗干扰能力为80dB,输出控制指令的包括幅度±10V;
2) 收发转换电路采样通道:4通道异步双工输出;
3) 数据采样率:≥200KHz;
4) 基阵接收的控制信号的A/D分辨率:12位(至少);
5) 模拟信号预处理的D/A分辨率:12位(至少);
6) D/A转换速率:≥200KHz;
7) 控制指令的信号输出形式:可选,包括(CW、线性调频、HFM等)多种形式。
根据上述功能模块分析和指标参量设计,进行嵌入式ARM多模式智能控制系统设计。
2.2控制算法描述
在控制系统设计中,控制算法是进行远程多模式控制的核心,通过控制算法设计进行程序加载,本文采用模糊PID神经网络控制算法,采用三层前向变结构PID神经网络控制系统,本文设计的模糊PID神经网络结构模型如图2所示。
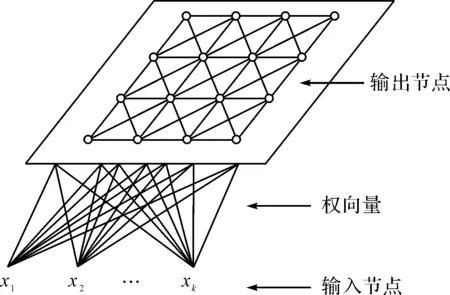
图2 三层前向变结构PID神经网络
三层神经网络结构分为输入层、中间层和输出层,其中输入层进行原始的控制信息的采样和调制,中间层作为核心层进行输入信号的控制处理和信号分析,输出层输出新的训练向量模式,供远程的多模式控制对象执行相关控制指令,令输入层的控制信号时间序列采样结果为x(t),t=0,1,…,n-1,调整与输出节点Nj*的自适应权系数,引入神经网络的竞争学习,输入训练向量与Nj*几何邻域NEj*(t)内的失真敏感值为
ωij(t+1)=ωij(t)+α(t)(xi(t)-ωij(t))
(1)

M=Mn+ΔM
(2)
(3)

(4)
其中,多模式远程控制的最佳的控制状态函数为
(5)

(6)
采用前向变结构PID控制,提高了控制系统的抗干扰性,此时输出v(k)等于输出层神经元的输出,控制系统的收敛性得到了保证。
3 系统硬件设计与实现
在上述控制系统的总体设计和控制算法描述的基础上,进行系统硬件电路设计,本文采用嵌入式设计方法,器件选择ADI公司的ADSP21160处理器系统作为数字处理芯片,系统最低采样率为25MHz,使用8位A/D芯片进行数据采样和模式识别,嵌入式系统设计的整机尺寸为70mm×50mm,温度范围是0℃~70℃,ARM核心芯片采用的是S3C2440A ARM9处理器,CPU采用三星S3C2440,显示单元设计采用7寸TFT-LCD液晶显示屏,480×RGB×800像素。在上述进行器件选择的基础上,设计TFT-LCD接口电路,TFT-LCD接口为LCD控制器提供控制寄存器/显存,LCDDMA、LPC3600通过时序逻辑控制输出到外部的数据接口VD[23:0];启动中断执行程序采集XY的坐标值,使用有源晶振进行时钟电路设计,多模式控制系统的I/O电压为3.3V,最大倍频数为35倍,确保多模式的ARM控制系统进行可靠的数据采样,采用分立元件构建时钟逻辑控制电路,进行收发转换电路设计。收发转换电路的工作原理相当于一个单刀双掷开关,通过收发转换电路进行控制指令的I/O中断操作,本文设计的基于ARM的嵌入式多模式智能控制系统的收发转换电路如图3所示。

图3 收发转换电路


图4 多模式智能控制嵌入式系统的硬件模块结构框图
4 系统测试与仿真结果分析
为了测试本文设计的基于ARM的多模式智能控制嵌入式系统的性能,进行仿真实验。系统调试中用DDS(直接数字合成)技术芯片AD9850进行控制系统的AD转换和数据采样调试,通过DAC变换转化成模拟信号实现远程多模式控制,远程多模式控制系统采用50MHz的参考时钟输出,时钟电路进行控制信号采样和仿真的工作流程如图5所示。
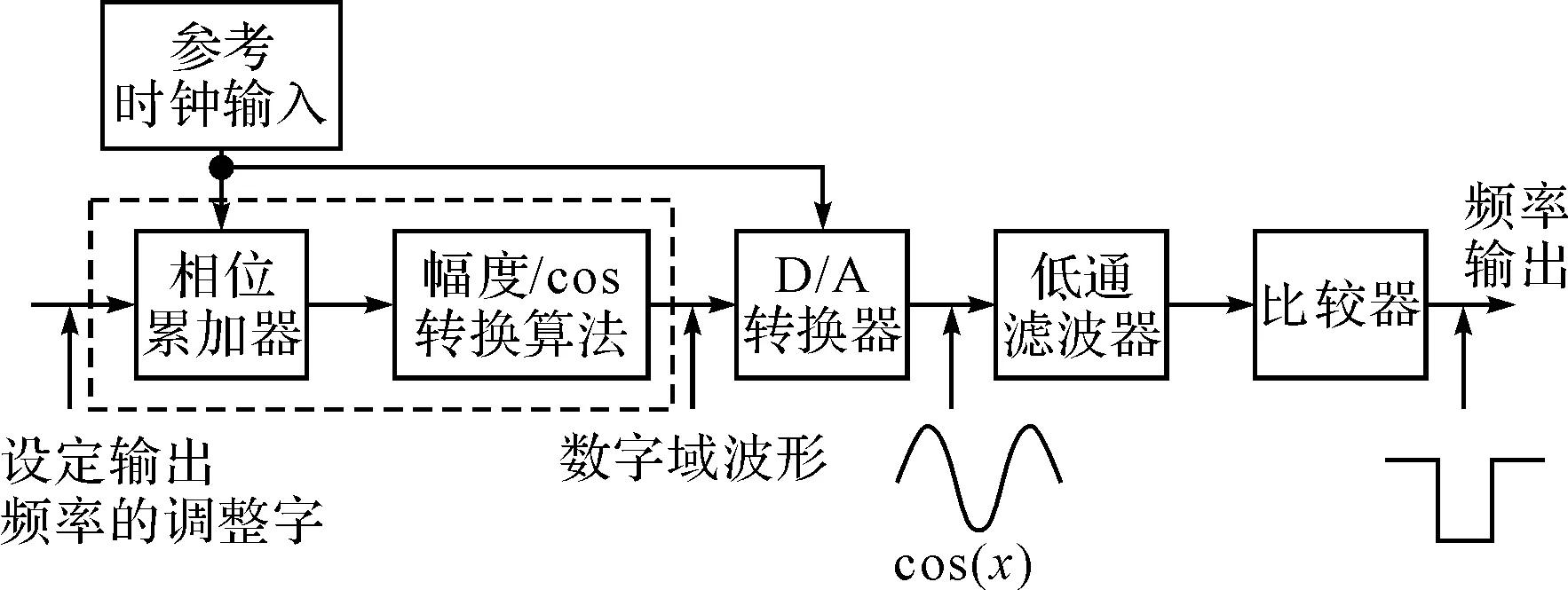
图5 时钟电路进行控制信号采样输出流程
多模式远程控制系统的逻辑时序控制信号通过高性能的MAX7000AE嵌入式处理芯片进行控制算法程序加载,采用本文控制系统进行智能家居多模式控制,先用WIN32 API函数CreateFile()函数打开设备,通过DeviceIoControl()进行逻辑时序信号输入控制,指令代码为
ARMD1 <='0' when((dgeytyA4='0')a iehi (dspA3 = '0')and(THHHpA2='0')and(dgregh1 = '0') and(sdghpA0 = '1')) and((IOS='0')and(hGTyS5='0'))else '1';
收发转换电路的控制信号通过用串口通信进行程序配置,配置过程为:
BEGIN CLKXM=1输出
IF(eiengti ghuhue nlen4='1') THEN
Ihurfe uuO1<=dfrhyhD13;
END IF;

图6 多模式控制输出信号跟踪曲线
从图可见,多模式控制输出信采样波形最高为4005,最低为0,在控制系统终端的控制信号采集结果正好与输入信号一致,说明采用本文系统进行多模式远程跟踪控制,具有较好的控制精度,实时性和收敛性较好,性能可靠稳定。
5 结语
远程智能控制系统由原来的单一模式转化为多模式,通过多模式智能控制,为控制对象提供多功能的遥控操作。多模式智能控制建立在物联网和多传感器网络的基础上,通过传感器网络和射频识别RFID技术进行数据采样分析,生成控制指令,然后通过主控系统进行程序加载,对远程控制对象进行多模式操控,实现智能控制,传统的多模式智能控制系统采用Android嵌入式设计方法,对I/O接口的控制信号调理性能不好。提出一种基于ARM的多模式智能控制嵌入式系统设计方法。首先进行了多模式智能控制系统的总体设计和功
能模块分析,结合PID神经网络控制算法进行多模式控制程序加载,然后进行了控制系统的功能模块的硬件部分设计。系统仿真结果表明,采用本文系统进行多模式智能控制,稳定性较好,精度较高,性能优越。
参 考 文 献
[1] 葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137-141.
GE Lizhi. Visual simulation of UUV Attack Model Based on Whole Trajectory Control Analysis[J]. Ship Electrolic Engneering,2015,35(3):137-141.
[2] 高志春,陈冠玮,等.倾斜因子K均值优化数据聚类及故障诊断研究[J].计算机与数字工程,2014,42(1):14-18.
GAO Zhichun, CHEN Guanwei, HU Guangbo, et al. Fault Diagnosis and Optimal Data Clustering Based on K-Means with Slope Factor[J]. Computer & Digital Engineering,2014,42(1):14-18.
[3] 孙克辉,贺少波,董燕青.简化洛伦兹混沌系统的追踪同步控制[J].信息与控制,2015,44(4):393-397.
SUN Kehui, HE Shaobo, DONG Yanqing. Tracking Synchronization Control of the Simplified Lorenz Chaotic System[J]. Information and Control,2015,44(4):393-397.
[4] Mahmoud E E. Complex complete synchronization of two nonidentical hyperchaotic complex nonlinear systems[J]. Mathematical Methods in the Applied Sciences,2014,37(3):321-328.
[5] Matheny M H, Grau M, Villanueva L G, et al. Phase synchronization of two anharmonic nanomechanical oscillators[J]. Physical Review Letters,2014,112(1):014101.
[6] 陈士华,谢进,陆君安,等.Rössler混沌系统的追踪控制与同步[J].物理学报,2002,51(4):749-752.
CHEN Shihua, XIE JIN, LU Junan, et al. Tracking control and synchronization of the Rössler’s chaotic system[J]. Acta Physica Sinica,2002,51(4):749-752.
[7] 文天柱,许爱强,程恭.基于改进ENN2聚类算法的多故障诊断方法[J].控制与决策,2015,30(6):1021-1026.
WEN Tianzhu, XU Aiqiang, CHNEG Gong. Multi-fault diagnosis method based on improved ENN2 clustering algorithm[J]. Control and Decision,2015,30(6):1021-1026.
[8] 王爱珍,侯成郭,任国凤.直接序列扩频的分层级联随机共振接收算法[J].计算机应用,2015,35(4):934-937,959.
WANG Aizhen, HOU Chengguo, REN Guofeng. Layered and cascaded stochastic resonance algorithm for direct sequence spread spectrum signal receiving[J]. Journal of Computer Applications,2015,35(4):934-937,959.
[9] 赵石磊,郭红,刘宇鹏.基于轨迹跟踪的线性时滞系统容错控制[J].信息与控制,2015,44(4):469-473.
ZHAO Shilei, GUO Hong, LIU Yupeng. Fault Tolerant Control for Linear Time-delay System Based on Trajectory Tracking[J]. Information and Control,2015,44(4):469-473.
[10] Bouarar T, Marx B, Maquin D, et al. Fault-tolerant control design for uncertain Takagi-Sugeno systems by trajectory tracking: A descriptor approach[J]. IET Control Theory & Applications,2013,7(14):1793-1805.
收稿日期:2015年10月10日,修回日期:2015年11月27日
基金项目:2012广东省质量工程人才培养实验区项目(编号:粤教高函[2012]204号);2014年度广东省大学生科技创新培育项目(编号:pdjh2015b0938);2014年国家级大学生创新创业训练计划项目(编号:201413656005);2012广东省质量工程项目“机电综合技能实训中心”(编号:粤教高函[2012]204号)资助。
作者简介:陆兴华,男,硕士,讲师,研究方向:计算机控制技术、控制算法、人工智能。范太霖,男,研究方向:自动控制技术、嵌入式硬件设计、人工智能。谢振汉,男,研究方向:嵌入式技术、单片机开发。
中图分类号TP273
DOI:10.3969/j.issn.1672-9722.2016.04.024
Embedded System Design of Multi Mode Intelligent Control Based on ARM
LU XinghuaFAN TailinXIE Zhenhan
(Huali College Guangdong University of Technology, Guangzhou511325)
AbstractMulti mode intelligent control system has great application prospect in the field of remote intelligent home control, mechanical and electrical control. The traditional multi mode intelligent control system adopts Android embedded design method, and the control signal of I/O interface is not good. A design method of multi mode intelligent control embedded system based on ARM is proposed. Firstly, the overall design and function module of the multi mode intelligent control system is analyzed. Using ADI ARM11 as the main control system, WiFi or GPRS is used to transmit data and control command output. The PID neural network control algorithm is used to load the system. The hardware circuit design of the control system is carried out. The simulation results show that the system has better control accuracy, it has better real-time performance and better convergence performance, and the performance is reliable and stable.
Key WordsARM, intelligent control, embedded, system design
猜你喜欢
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
科学与财富(2016年28期)2016-10-14
单片机与嵌入式系统应用(2014年9期)2014-03-11
自动化博览(2014年4期)2014-02-28
