长距离无线激光传输设备的信号捕获与自动跟踪
2016-08-11 03:33:47莫海涛王庆福何晓垒潘晓乐中国电子科技集团公司第三十四研究所广西桂林54004辽宁行政学院信息技术系沈阳06
光通信技术 2016年6期
关键词:长距离
莫海涛,王庆福,何晓垒,潘晓乐(.中国电子科技集团公司第三十四研究所,广西桂林54004;.辽宁行政学院 信息技术系,沈阳06)
中文核心期刊
长距离无线激光传输设备的信号捕获与自动跟踪
莫海涛1,王庆福2,何晓垒1,潘晓乐1
(1.中国电子科技集团公司第三十四研究所,广西桂林541004;2.辽宁行政学院 信息技术系,沈阳110161)
摘要:针对长距离无线激光传输设备开通使用过程中容易受到超出视距范围及各种天气状况的影响,提出了一种无线激光传输设备的信号捕获与自动跟踪相结合的技术,并介绍了该技术的具体设计方案。关键词:长距离;无线激光传输设备;信号捕获;自动跟踪
0 引言
长距离无线激光传输设备是针对长距离、高速率无线光通信设备的市场需求而开发出的产品,适用于地面长距离通信。由于设备的设计通信距离大于我们的视距范围,单纯依靠操作人员借助光学天线的望远观察光路和可见信标光来捕获信号存在一定的难度,因此设备需要通过辅助开通设备完成自动扫描、捕获对准以简化开通难度。随着设备的通信距离加长,要求无线激光发射设备的发散角压缩得很小,通信链路更容易受到大气的影响,导致设备在接收端的光斑抖动引起接收光功率的不稳定也随之增加,因此必须在短距离跟踪技术的基础上针对长距离的情况进行技术优化。
1 信号捕获系统设计
1.1辅助对准设备
当设备的开通距离超出我们的视距范围时,首先要了解到架设地点的位置信息,使设备能大致对准对端,于是设计了辅助对准设备。辅助对准设备采用基于GPS的辅助定位系统将两点的经纬度以及海拔信息收集并相互传送对方,然后通过计算两点角度差,通过执行机构相互指向对方。辅助对准设备如图1所示,是由差分天线、差分处理计算单元、软件和枪瞄望远系统组成。
辅助对准设备可安装在无线激光传输设备上,使用前需将辅助设备的枪瞄望远系统与无线激光传输设备的光路进行同轴校准。辅助对准设备启动后,软件会通过差分天线和差分处理计算单元自动获取本端GPS坐标数据。操作人员将本端设备的GPS坐标数据告知对端人员,并手动输入对端设备的GPS坐标,点击“偏角计算”,软件会根据两端设备的经纬度和海拔高度等GPS坐标数据计算两端设备位置的偏角数据。此时我们调节无线激光传输设备的姿态,将两端设备的姿态数据调节到与计算得到的偏角数据一致的状态,实现粗对准。经过实际调试测试,辅助对准设备可以使系统对准精度达到0.2°,满足自动扫描捕获的精度要求。
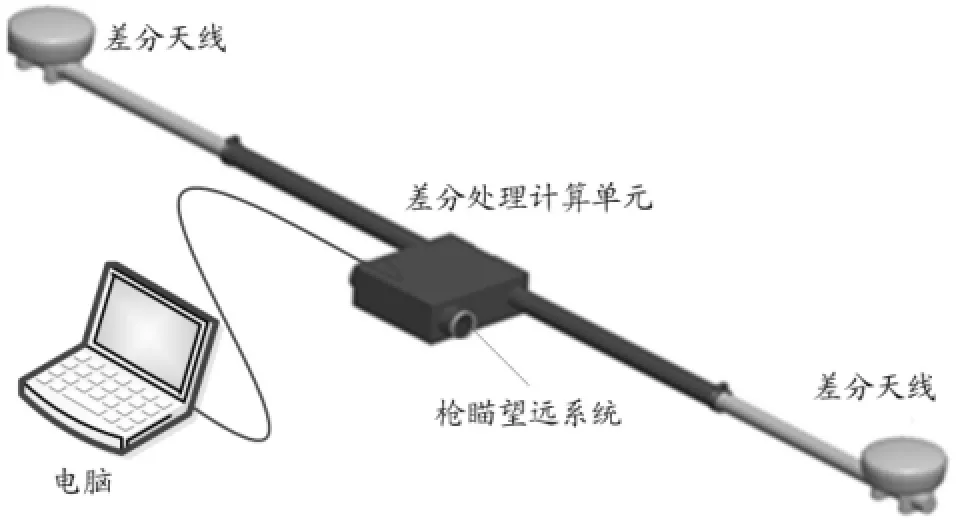
图1 辅助对准设备
1.2自动扫描捕获
设备在辅助开通设备的基础上采用的自动扫描捕获技术实现信号捕获。自动扫描捕获技术采用矩形螺旋式的扫描方式,扫描轨迹如图2所示。矩形螺旋式的扫描是从中心依次向外围进行矩形螺旋式的扫描,这种扫描方式的优点是能够在设定的扫描范围内从高到低地概率扫描且容易实现,也更容易设计扫描区域增量和重叠,扫描范围也可以覆盖设定扫描区域的所有部分。

图2 自动扫描轨迹图
自动扫描捕获的范围是扫描捕获技术的一个比较重要的参数,如果扫描范围过大会增加扫描捕获的时间,如果扫描范围过小又会降低扫描捕获的实用性。经实际测试,设备扫描范围确定为±2°,捕获概率可以达到93%,当未捕获成功时,需要人工介入,稍微调整设备的姿态,重新进行自动扫描捕获。如果要提高捕获概率,需要扩大扫描范围,这将大大增加单次扫描时间。通过扫描捕获的方式来使探测器获取跟踪信号,当跟踪探测器捕获到光信号就立即进入自动跟踪阶段。
2 自动跟踪系统设计
由于设备的通信距离较长,无线激光发射设备的发散角较小,使得光束在通信链路受到大气的影响较大,导致设备在接收端的光斑抖动引起接收光功率的不稳定也随着增加,这对自动跟踪系统的设计提出了较高的要求。
四象限探测跟踪法实现系统快速、大范围的捕获和粗对准,在系统建立连接时或出现大范围偏移时启动,保证系统能快速捕获并进入到粗对准状态。四象限探测跟踪法虽然跟踪速度快且范围大,但是QD探测器极易受较长的通信链路引起的光斑抖动从而影响稳定性;而光功率检测跟踪法则弥补了四象限探测跟踪法的缺点,虽然跟踪范围和速度较慢,但可以实现系统的精确对准和稳定跟踪。本文将两种跟踪方法结合起来,可以扬长避短,充分发挥出两者的优势。
2.1四象限探测跟踪系统
四象限探测跟踪系统由信标光、探测器和伺服机构组成。由于无线激光传输设备传输的距离较远,考虑到雾衰、背景杂光等影响,直接选择1550nm波长的信号光作为信标光使用[1],选择1550nm响应的QD探测器的探测信号作为自动跟踪系统分析处理对象[2],驱动伺服转台。四象限探测跟踪系统框图如图3所示。
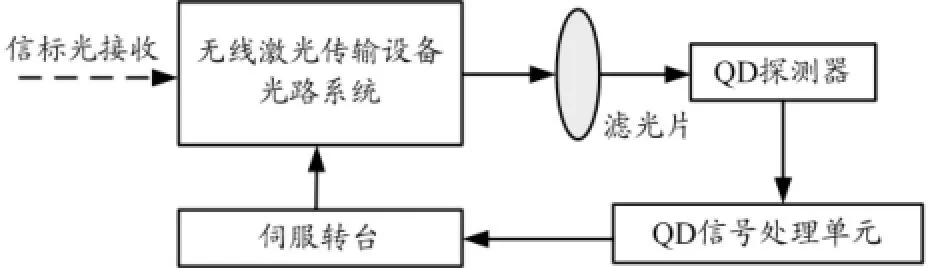
图3 四象限探测跟踪系统框图
QD探测器有a、b、c、d四个象限,每一象限有着相同的光电特性,每一象限产生的光电流正比于照在它上面的光功率。当QD的四个象限所接收到的光功率大小一致时,说明光斑照在QD的正中央。当无线激光传输设备相互对准时,通过无线激光传输设备接收到的信标光光斑是落在QD探测器上的。因此,我们只要计算出当前信标光光斑离QD探测器中央位置的偏差值,QD信号处理单元再将此偏差值转换为伺服转台水平和俯仰的转动角度,以此驱动伺服转台调整两端设备的姿态,完成粗对准。
2.2光功率检测跟踪系统
光功率检测跟踪系统实际上是对人工调节对准方法的一种模拟,主要是通过两端设备的接收光功率值来进行判断。光功率检测跟踪系统框图如图4所示。
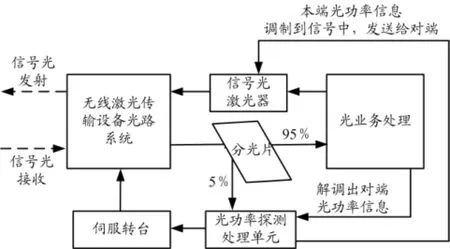
图4 光功率检测跟踪系统框图
经过四象限探测粗跟踪后,无线激光传输设备已经能够接收到对端的光信号,该光信号中包含了对端设备接收的光功率信号信息,通过分光片将光信号分为两部分:一部分光作为信标光,进入光功率探测处理单元,根据该部分光的强度,可以相对地判断出接收光功率的值,并将该功率信息调制到信号光中,通过信号光激光器发送给对端接收;另一部分较强的光作为信号光,进入光业务处理单元,而该部分光中调制有对端设备的接收光功率信息,将其解调出来,进入光功率探测处理单元。这样,光功率探测处理单元就可以根据探测到的本端光功率值和接收到的对端光功率值,控制伺服转台,实现精跟踪。
2.3自动跟踪系统的实现
在自动跟踪系统中,两种跟踪方法的切换是整个系统的关键点,直接影响到设备的稳定性。具体的实现方法是根据光功率强度的变化给两种跟踪方法分别设置不同的阈值:从QD探测器接收到光功率信号至无线激光传输设备的探测器检测到某一数值的光功率的时间段使用四象限探测跟踪法;光功率值达到精跟踪阈值后使用光功率检测跟踪法。自动跟踪系统框图如图5所示。
在实际的测试过程中,由于受大气湍流的影响,四象限探测无法确定功率的跳变是由于方位的偏差或湍流引起,会出现频繁调节,在系统中增加锁定四象限探测跟踪的功能可以缓解大气湍流对自动跟踪系统的影响:依照光功率检测跟踪系统所监测的光功率取若干时间的功率平均值,可以判别是否光学天线方位出现偏移,以确定是否启动四象限探测跟踪。
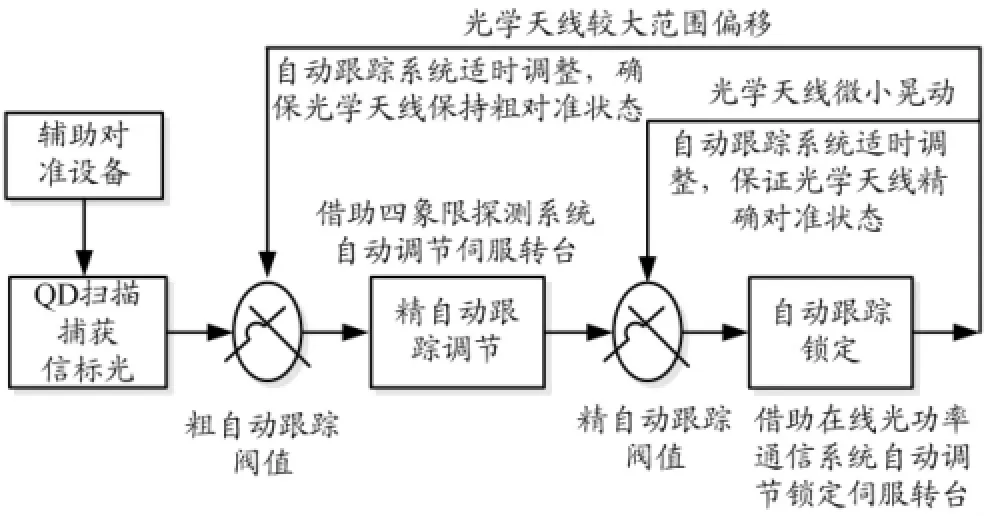
图5 自动跟踪系统实现框图
经实际测试,加锁定控制功能后可大幅度减少跟踪次数,提高了自动跟踪系统的准确度和整个无线激光传输设备稳定性。实际测试记录如表1所示。

表1 跟踪启动次数记录表(时间:15min,距离:10km)
3 结束语
无线激光通信具有容量大、安装开通方便快捷等特点,但是其开通和使用过程也极易受到各种天气情况及使用距离等的影响。本文针对长距离无线激光通信系统提出了一种信号捕获和自动跟踪的方法,通过实际测试证明,该技术可以使得无线激光通信设备在视距范围以外的距离也能够快速准确地开通和稳定使用,对于下一步的星地、星间无线激光通信的相关研究提供了一定理论和数据支持。
参考文献:
[1]柯熙政,席晓莉,刘长城.大气激光通信中一种新的光束自动捕获方法[J].光通信技术,2004,28(10):39-41.
[2]姜会林.空间激光通信技术与系统[M].北京:国防工业出版社,2010.
中图分类号:TN929.12
文献标识码:A
文章编号:1002-5561(2016)06-0041-03
DOI:10.13921/j.cnki.issn1002-5561.2016.06.012
收稿日期:2016-02-25。
作者简介:莫海涛(1981-),男,工程师,主要从事大气激光通信方面的技术研究。
Signal acquisition and automatic tracking for a long distance wireless laser communicator
MO Hai-tao1,WANG Qing-fu2,HE Xiao-lei1,PAN Xiao-le1
(1.The 34th Research Institute of CETC,Guilin Guangxi 541004,China;2.Department of information technology,Liaoning Academy of Governance,Shenyang 110161,china)
Abstract:The long distance wireless laser communicator is easy to be affected by beyond visual range and some kinds of weather conditions.In view of the above factors,the paper introduces a signal acquisition technology and an automatic tracking technology used in long distance wireless laser communicator,and gives a detailed description on the design of these technologies.
Key words:long distance,wireless laser communicator,signal acquisition,automatic tracking
猜你喜欢
家庭影院技术(2019年11期)2019-12-09 09:14:14
建材发展导向(2019年10期)2019-08-24 06:26:42
水利规划与设计(2017年8期)2017-12-20 08:24:07
水利规划与设计(2017年8期)2017-12-20 08:24:02
水利规划与设计(2017年6期)2017-07-18 10:56:26
水利规划与设计(2017年12期)2017-02-06 03:39:50
家庭影院技术(2017年12期)2017-02-06 02:32:16
焊接(2015年9期)2015-07-18 11:03:52
水利建设与管理(2015年10期)2015-05-09 08:29:47
现代企业(2015年6期)2015-02-28 18:51:53