
远程分布式雷达时间同步的实现*
2016-08-10 03:23胡诗
舰船电子工程 2016年7期
胡 诗
(武汉藏龙北路1号 武汉 430205)
远程分布式雷达时间同步的实现*
胡诗
(武汉藏龙北路1号武汉430205)
摘要讨论了现代相参雷达对时间同步的需求,提出了一种基于高稳定时钟和GPS秒脉冲相结合的远程分布式雷达时间同步的方法及能达到的性能,该方法既保证了系统长期时间稳定度,又避免了因GPS秒脉冲精度不够带来的短期稳定度较低的问题,工程实现上具有易实现、可靠稳定的特点,为远程分布式雷达时间同步的设计提供了设计思路。
关键词远程分布式; 时间同步; 相参雷达; 秒脉冲
Class NumberTN957
1引言
现代雷达多采用固态全相参技术体制,在该技术体制下目标的杂波中发现概率可达50dB以上,甚至更高[1~3]。该体制下需要雷达各主要处理部分严格时间同步,这也是脉冲压缩技术和动目标检测(MTD)技术实现的前提[6~7]。
图1、图2所示分别为不同守时精度(不同周期间的最大时间差)下MTD的效果,当守时精度为30ns时,目标在多普勒通道上的响应趋于均匀分布,目标的速度特征已失去,此时MTD在改善因子方面的效果已经丢失,目标的信噪比损失15dB;当守时精度为0.25ns时,在距离多普勒谱上目标包络明显,相参积累增益和改善因子性能得到保障。
实现相参雷达的工作性能,保证各主要部分时间同步非常重要。
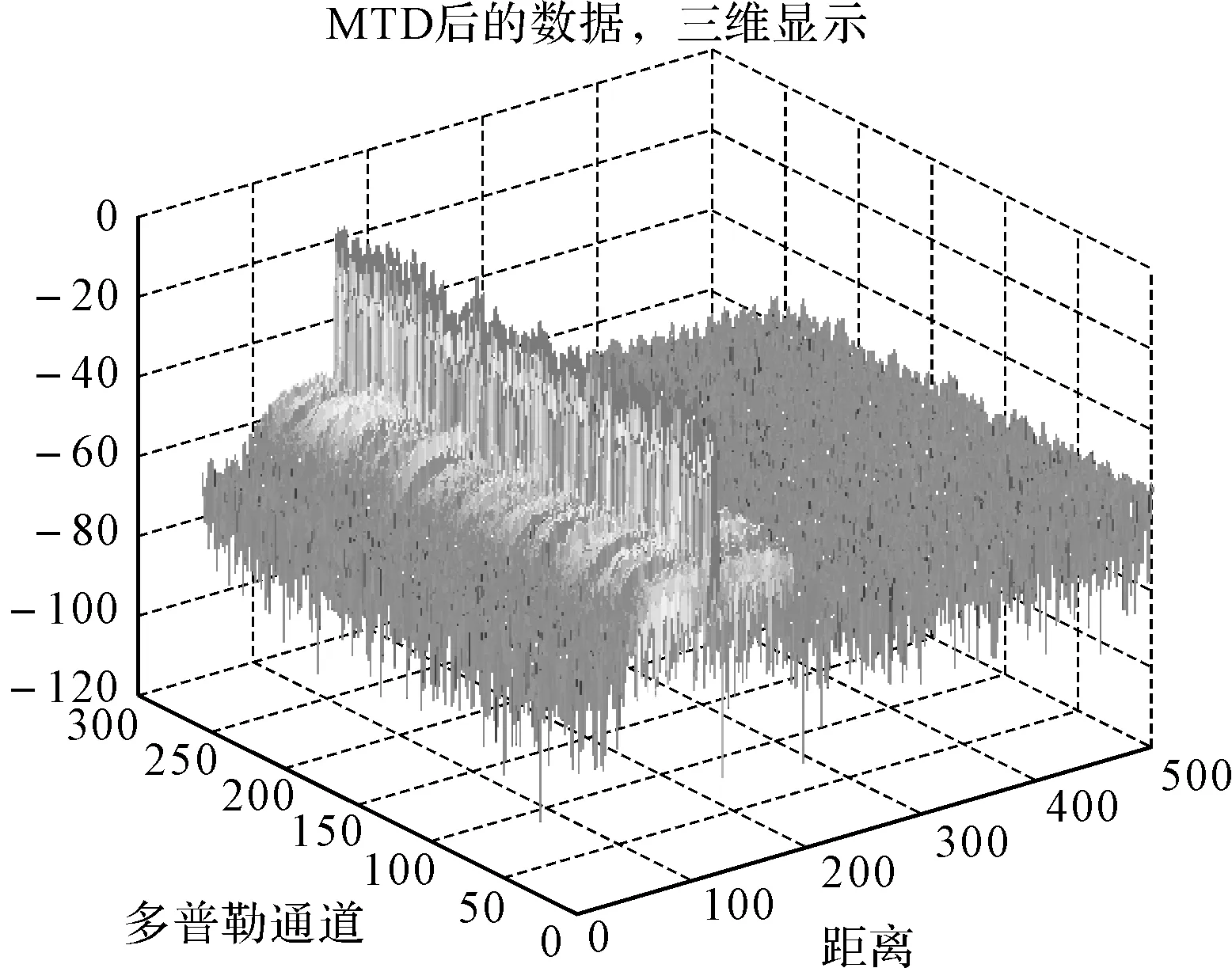
图1 守时精度为30ns时MTD效果
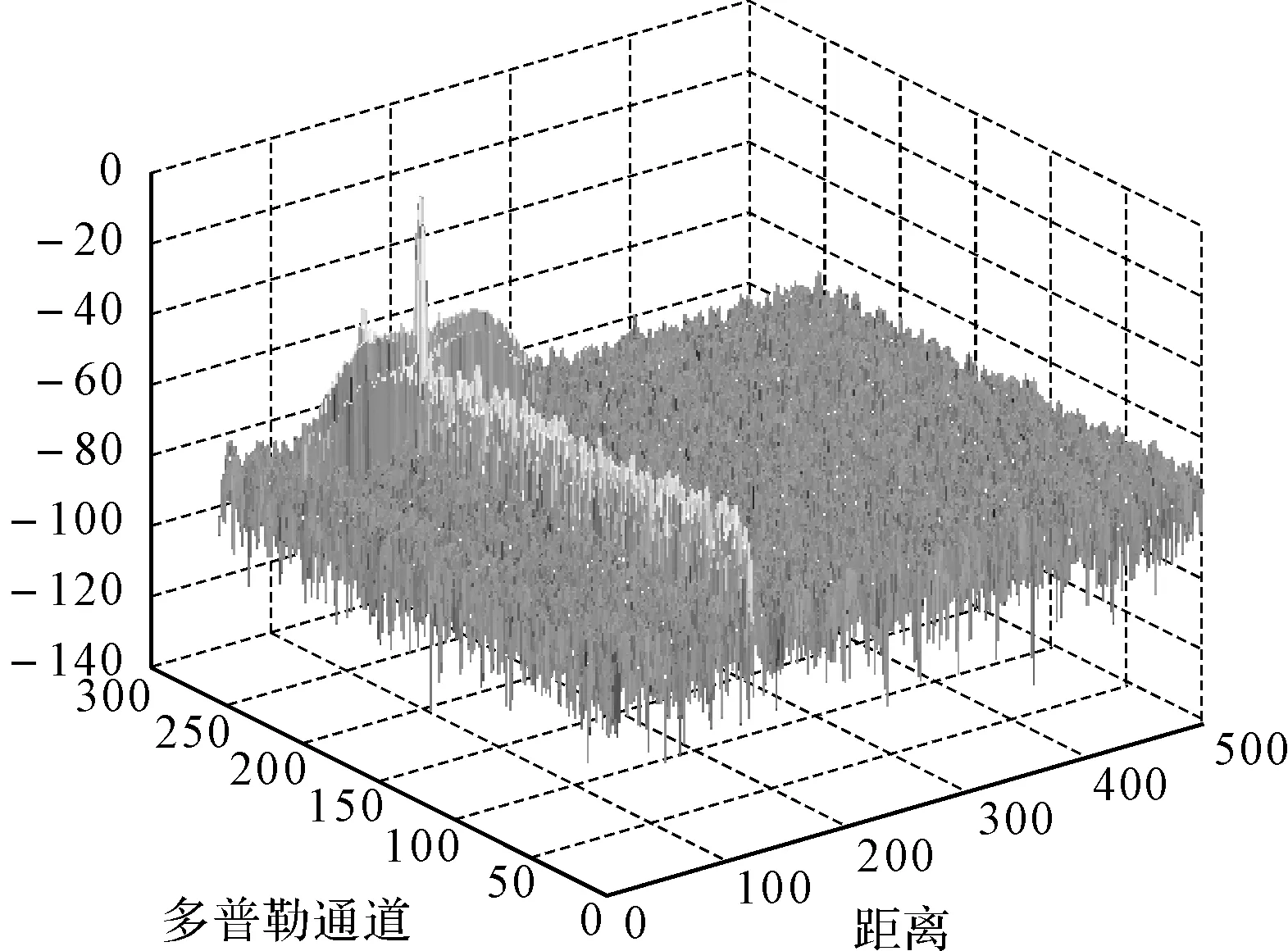
图2 守时精度为0.25ns时MTD效果
2远程分布式雷达时间同步的难点
雷达远程分置时无法通过有线方式进行时间同步。通过GPS/北斗的秒脉冲信号同步时,同步精度为20ns~30ns,远不能满足要求[7,10]。如收发两端都采用守时精度达到10-12高稳定度的晶振,短时间稳定度满足要求,但是系统长时间工作后会发生频率偏移,从而降低雷达的工作性能[5,7]。
3远程分布式雷达时间同步的方法
使用高稳定度晶振与GPS秒脉冲相结合的方法实现远程多站之间的时间同步。GPS秒脉冲精度不够,其误差为随机噪声,呈高斯分布。对于随机误差,当样本量足够时,其均值接近真值。实现方法概括如下:
1) 使用高稳定度晶振保证短期时间(频率)稳定度,守时精度为10-12;
2) 使用GPS秒脉冲保证长期时间(频率)稳定度;
3) 对GPS秒脉冲进行校准,根据GPS秒脉冲误差随机分布的特点,以多次秒脉冲的均值代替真值,提高秒脉冲的精度,使守时精度达到0.25×10-9。
时钟校准公式如下:
其中ti为第i个秒脉冲出现的时刻,单位为ns;i为索引值,ki表示第i个秒脉冲对应的相对时间,ki+b为第i个采样点的绝对时间。b为截距,为第一个采样点对应的绝对时间的估计,b值确定后,秒脉冲出现时刻的估计Ti就确定了。
校准时序如图3所示,开机后在1s钟内会接收到第一个秒脉冲,用此秒脉冲对时钟进行校准,此时时钟精度为30ns,如图4所示;经1分钟后再对时钟进行一次校准,此时时钟精度为10ns;经1小时后再对时钟进行一次校准,此时时钟精度为1ns;之后每一小时对时钟进行一次校准,时钟精度可达到0.25ns以下,如图5所示。图6所示为时钟误差与校正次数的曲线关系,校正初期曲线斜率较大;超过一个小时后校正效果改善已不再明显。

图3 时钟校准时序
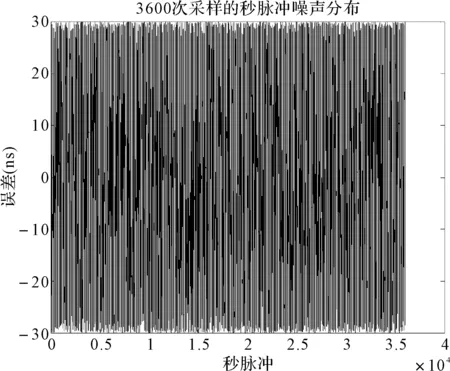
图4 校准前的秒脉冲误差分布
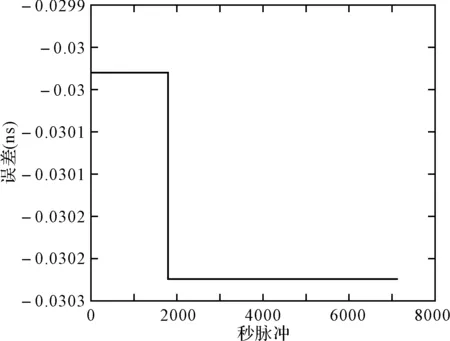
图5 经2小时的累计校准后时钟误差
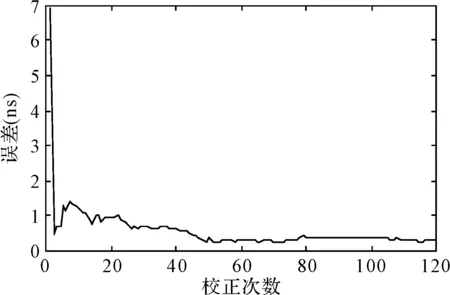
图6 时钟误差与校正次数的关系
经100次试验,取平均结果,如表1中第二列所示,取100次的最差结果如表中第三列所示。
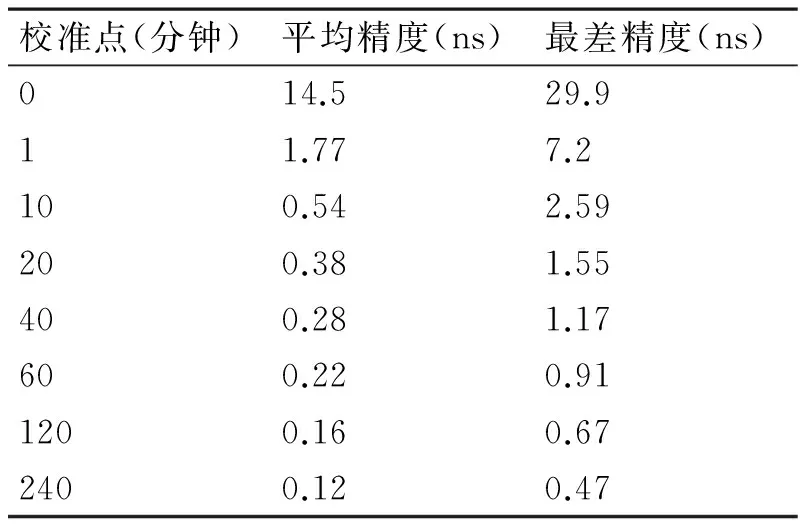
表1 实验结果
使用不同精度时钟的MTD效果如图7所示。
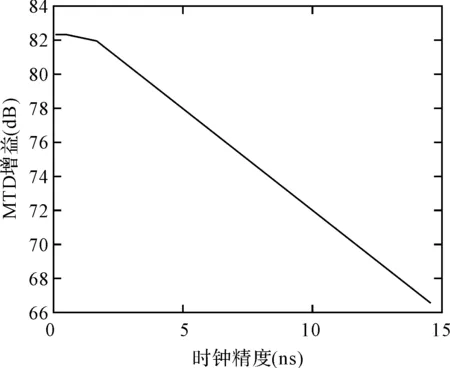
图7 不同时钟精度下MTD增益对比
4结论
分布式雷达的各分离部分使用高稳定的时钟作为本地时钟源;各部分使用GPS秒脉冲作为长期时间稳定度的同步信号;雷达开机时收集GPS秒脉冲信号,在开机的前1分钟各部分分别使用本地时钟源工作;1分钟后使用秒脉冲同步一次,此时各部分间的时间误差小于1.77ns;10分钟后再用秒脉冲同步一次,此时各部分的时钟误差小于0.54ns;1小时后再用秒脉冲同步,此时各部分时钟误差小于0.22ns;再之后每隔1小时用秒脉冲同步一次,各部分的时钟误差小于0.12ns。时间再增加,效果不明显。
经过仿真,此种方法可以满足相参雷达对时间稳定度的要求,可以用于工程实施。
参 考 文 献
[1] 【美】杰里L.伊伏斯,爱德华K.李迪.现代雷达原理[M].北京:电子工业出版社,1991:132-231.
[2] Merrill I. Skolnik.雷达手册(第二版)[M].北京:电子工业出版社,2003:100-121.
[3] 刘益成,孙祥娥.数字信号处理[M].北京:电子工业出版社,2009:20-53.
[4] 陈伯孝.现代雷达系统分析与设计[M].西安:西安电子科技大学出版社,2012:46-97.
[5] 弋稳.雷达接收机技术[M].北京:电子工业出版社,2005:77-98.
[6] 吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008(4):102-116.
[7] 赵树杰.雷达信号处理技术[M].北京:清华大学出版社,2010:64-88.
[8] 【俄】Victor S Chernyak.双(多)基地雷达系统[M].北京:电子工业出版社,2011:92-115.
[9] 郦能敬,王被德,沈齐等.对空情报雷达总体论证-理论与实践[M].北京:国防工业出版社,2008:220-260.
[10] 张福顺,袁渊,焦永昌.稀布阵综合脉冲孔径雷达发射天线阵的研制[J].电波科学学报,2007,22(2):321-324.
收稿日期:2016年1月9日,修回日期:2016年2月21日
作者简介:胡诗,男,研究方向:舰船指控。
中图分类号TN957
DOI:10.3969/j.issn.1672-9730.2016.07.019
Realization of Time Synchronization of Romote Distributed Radar
HU Shi
(No.1 Canglong North Road, Wuhan430205)
AbstractThis article discusses the requirements of modern coherent radar to time synchronization, and propose a method of remote distributed radar with time synchronization, which based on the combination of high stability clock and GPS second pulse, and the performance can be achieved by this method. This method not only ensure the stability of the system for a long time, but also avoids the problem of low short-term stability due to the lack of GPS second pulse precision. It has the characteristics of easy realization and reliable stability in engineering realization, which provides a way of thinking for the design of the time synchronization of the remote distributed radar.
Key Wordsremote distributed, time synchronization, coherent radar, second pulse
