
光纤陀螺分段Elman网络温度误差补偿方法*
2016-08-10 03:32亓洪标胡国欣
舰船电子工程 2016年7期
亓洪标 江 赛 胡国欣
(1.海军工程大学训练部 武汉 430033)(2.海军工程大学科研部 武汉 430033)(3.海军工程大学电气工程学院 武汉 430033)
光纤陀螺分段Elman网络温度误差补偿方法*
亓洪标1江赛2胡国欣3
(1.海军工程大学训练部武汉430033)(2.海军工程大学科研部武汉430033)(3.海军工程大学电气工程学院武汉430033)
摘要设计了-15°~50°温度范围试验,采集光纤陀螺在不同温度环境下的漂移输出。数据分析发现,不同的温度段温度对陀螺影响效果不同,为提高光纤陀螺温度误差补偿精度,提出分段建模思想。利用Elman网络,分三个温度段分别进行建模。利用所建模型对光纤陀螺进行温度补偿。实测数据的计算结果表明,所建模型能够有效改善光纤陀螺温度漂移,陀螺精度得到较大程度提高。
关键词光纤陀螺; 温度漂移; Elman网络; 多模型
Class NumberV241
1引言
近年来光纤陀螺由于其潜在优势,被广泛应用于汽车导航、火箭姿态控制、武器控制等领域,具有广阔而光明的前景[1]。光纤陀螺是一种基于sagnac效应的惯性测量仪表,是构成船用捷联式惯导的核心器件,它利用固态的全光纤结构实现载体旋转角速度的测量[2]。与传统机械陀螺相比有许多突出的优点,如精度高、耐冲击、抗震性好、动态范围大、对重力加速度不敏感等[3]。
为研究温度对陀螺的特性限制,国内外学者做了大量研究工作。1980年,Shupe D.M指出,在干涉型光纤陀螺中,光纤环上存在由温度变化引起的非互易相位误差,并推导了该误差的数学表达式。Shupe误差从理论上指出了温度漂移的机理。作为惯性导航系统的核心器件,由于构成光纤陀螺的主要器件如光纤圈、集成光学器件、耦合器等对温度较为敏感[4],当环境温度变化时,陀螺的零位漂移明显加剧,标度因子的线性度也明显变差[5]。因此,对光纤陀螺的温度特性进行研究,并进行建模补偿以提高陀螺精度是非常必要的。国内关于光纤陀螺温度建模的研究主要集中在单模型方面,忽略了温度对光纤陀螺的影响在不同的温度区间具有不同规律的事实。本文根据研究发现的规律,将温度分成高、中、低三段区间分别建模,提出基于分段多模型神经网络的光纤陀螺温度误差补偿方法,有效提高了光纤陀螺温度误差补偿精度。
2温度影响机制分析
温度对光纤陀螺的影响包括两个方面。一是陀螺工作的环境温度对陀螺工作状态的影响;二是陀螺器件本身材料特性对温度的敏感性[6]。构成光纤陀螺仪的核心部件对温度敏感,陀螺工作环境温度变化将导致光纤环中光纤折射率发生变化,则两束反向传播的光纤将产生一个不同的光程差,形成非互易效应,陀螺偏置漂移主要是由非互异相移引起的位置偏移[7]。
当两束干涉光分别以顺时针(CW) 和逆时针(CCW) 方向传输通过长度为L、折射率为n的光纤环时,产生的相位延迟为[8]
(1)
(2)
式中,φcw(t)为顺时针光产生的相移,φccw(t)为逆时针光产生的相移,c为光在光纤环中传播的速度,z为任一点到端点的距离,T为光通过光纤环的时间。化简后得光纤环温度变化产生的热致非互易相位延迟为
(3)
3数据处理及建模补偿
国外学者J. L. Elman在20世纪90年代提出了一种动态反馈神经网络,即Elman网络[9~10]。该网络在隐含层中增加了一个过渡层,过渡层具备一步延时算子的记忆功能,从而使该网络能够适应时变特性。相比BP网络,Elman网络具有算法简单,实现方便,网络稳定性强等优点。因此本文选取Elman网络进行建模。Elman网络是一个四层网络结构,包括输入层(ilayer),隐含层(jlayer),过渡层(rlayer)和输出层(olayer)。Elman网络的网络结构形式如图1所示。

图1 Elman网络结构
Elman网络中隐含层神经元通过过渡层神经元的输出和输出层神经元实现反馈功能。其中,过渡层神经元被认为是记忆单元,因为它们可以存储隐含层神经元输出的先验信息。
实验时将陀螺置于温箱内,X、Y、Z陀螺的放置方向为前、上、右,每5ms保存一帧数据。实验测量了温度从-15°~50°区间变化时的零漂。利用Matlab对数据取平均作图后发现,在-15°~0°范围内,陀螺漂移与温度变化近似成正比,在0°~30°范围内,陀螺漂移与温度变化近似成反比,在30°~50°范围内,陀螺漂移与温度变化近似为二次函数关系。根据上述发现,将温度分成以下三个区间:-15°~0°;0°~30°;30°~50°。将温度值和温变率作为网络输入,陀螺漂移作为网络输出,利用Elman网络分别进行建模。通过处理将各段模型连接起来,形成完整的温度漂移补偿模型。以X陀螺为例,温度对陀螺漂移的影响及补偿后效果分别如图2、图3所示。
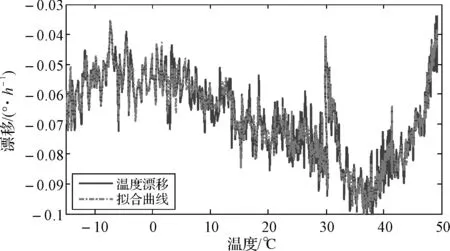
图2 拟合效果
对样本补偿前,光纤陀螺漂移的总体均值为-6.904e-2°/h,标准差为1.58e-2,补偿后均值为2.915e-9°/h,标准差为3.863e-3。可以看出补偿效果明显。
在实验得到的样本数据中,分别随机选取三个温度区间段的数据,用所建模型对其进行验证,效果如图4~图6所示。
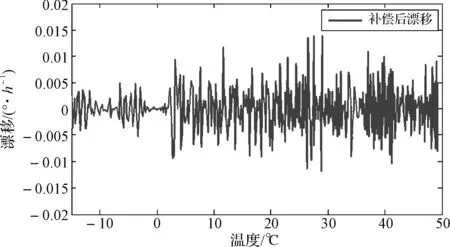
图3 补偿效果
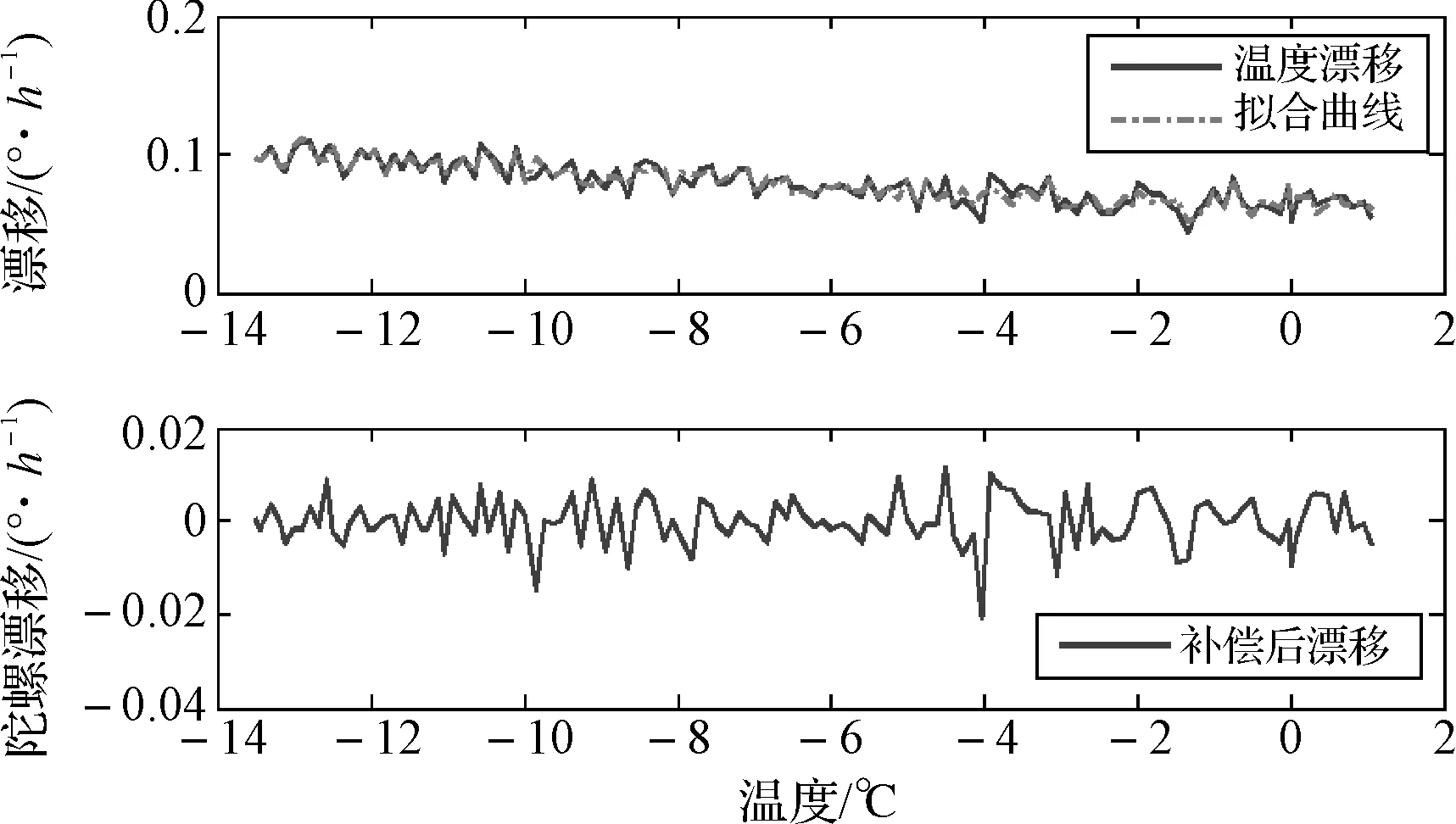
图4 第一温度区间验证效果
第一组数据补偿前陀螺漂移均值为0.0786°/h,标准差为0.01457,补偿后陀螺漂移均值为-8.002e-8°/h,标准差为5.11e-3。
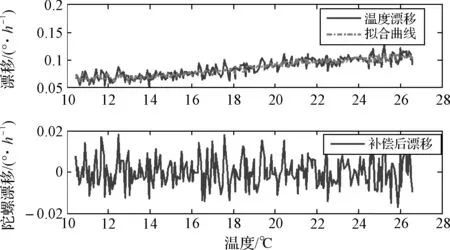
图5 第二温度区间验证效果
第二组数据补偿前陀螺漂移均值为0.08695°/h,标准差为0.01609,补偿后陀螺漂移均值为-3.166e-8°/h,标准差为7.11e-3。

图6 第三温度区间验证效果
第三组数据补偿前陀螺漂移均值为0.1062°/h,标准差为9.494e-3,补偿后陀螺漂移均值为2.554e-8°/h,标准差为7.118e-3。
4结论
首先借助Shupe D.M误差方程,分析研究了光纤陀螺温度漂移的产生机理,从理论上揭示了温度对陀螺漂移的影响。在大量实测数据分析处理基础上,发现温度对零漂的影响在不同的温度区间有不同的规律。据此,利用Elman网络拟合,进行分段建模。依据所建立的模型,对其它相关数据进行验证。仿真和测试的结果表明,在-15°~50°温度区间内,补偿前标准差为1.58e-2,补偿后标准差为3.863e-3。可以看出补偿效果明显。
为了验证方案的适用性,从采集的陀螺数据中随机选取三组数据,用相同的方法进行补偿验证。验证结果表明,文章所建立的模型不仅适用于训练数据,对于温度范围内的其他样本数据同样具有良好的补偿效果。
参 考 文 献
[1] 杨孟兴,陈俊杰.光纤陀螺静态温度特性的分析及实验研究[J].中国惯性技术学报,2011,18(6):751-755.
[2] 程建华,陈李,李明月.船用光纤陀螺精密温控系统的设计与实现[J].中国惯性技术学报,2011,19(4):403-407.
[3] 李家垒,何婧,许化龙.光纤陀螺的温度试验与误差补偿[J].光电工程,2009,36(12):132-137.
[4] 韩冰,林玉荣,邓正隆.光纤陀螺温度漂移误差的建模与补偿综述[J].中国惯性技术学报,2009,17(2):218-224.
[5] Shupe D.M. Thermally induced nonreciprocity in the fiber-optic interferometer[J]. Appl.Opt,1980,19(5):654- 655.
[6] 张桂才,杨清生.干涉式光纤陀螺的温度特性研究[J].光电子技术与信息,2001,14(1):17-22.
[7] 冯丽爽,南书志,金靖.光纤陀螺温度建模及补偿技术研究[J].宇航学报,2006,27(5):939-941.
[8] Cassie M Lofts, Paul B Ruffin, Mike Parker, C C Sung. Investigation of the effects of temporal thermal gradients in fiber optic gyro scope sensing coils. part2[J]. Opt.Eng,1993,36(1):29-34.
[9] 高隽.人工神经网络原理及仿真实例[M].北京:机械工业出版社,2007:1-55.
[10] 诸一江,吕锡仁.陀螺仪温度模型建模方法介绍[J].中国惯性技术学报,1995,3(3):32-37.
收稿日期:2016年1月10日,修回日期:2016年2月25日
作者简介:亓洪标,男,硕士,工程师,研究方向:导航技术及教育管理。
中图分类号V241
DOI:10.3969/j.issn.1672-9730.2016.07.014
Piecewise Fitting for Temperature Error Compensation Method of Fiber Optic Gyro Based on Elman Network
QI Hongbiao1JIANG Sai2Hu Guoxin3
(1.Training Department,Naval University of Engineering, Wuhan430033)(2.Office of Research and Development, Naval University of Engineering, Wuhan430033)(3.Electrical Engineering College, Naval University of Engineering, Wuhan430033)
AbstractTemperature test are designed with range of -15°~50°, and the drift output of fiber optic gyroscope in different temperature environments is collected. Data analysis finds that different temperature have different effect on FOG drift. In order to improve the FOG temperature error compensation precision, the idea of multi-model piecewise fitting is proposed. Modeling in three different temperature segment respectively based on Elman network is conducted. Calculating results of the measured data show that the model can effectively improve the temperature drift of fiber optic gyro, and the precision of the gyroscope is improved.
Key Wordsfiber optic gyro, temperature drift, Elman network, multi-model
