
基于扩张状态观测器的永磁电机电流预测控制
2016-08-04 06:18张明晖杨家强楼佳羽
浙江大学学报(工学版) 2016年7期
关键词:永磁同步电机
张明晖,杨家强,陈 磊,楼佳羽
(浙江大学 电气工程学院,浙江 杭州 310027)
基于扩张状态观测器的永磁电机电流预测控制
张明晖,杨家强,陈磊,楼佳羽
(浙江大学 电气工程学院,浙江 杭州 310027)
摘要:针对永磁同步电机传统无差拍电流预测控制中系统参数失配以及模型不确定性带来的电流扰动问题,提出基于扩张状态观测器的电流预测控制算法.在传统无差拍电流预测控制算法的基础上,建立包含交、直轴电流和内、外扰动量的扩张状态观测器数学模型.引入权重因子,通过交、直轴电流观测值对预测控制中的参考电流进行修正,利用观测获得的控制系统扰动量对电机的参考电压进行修正.开展所提算法和传统的预测控制算法的实验对比研究.实验结果表明,采用该方法能够有效地减小系统电流环扰动和转矩波动,提高稳态转速精度.
关键词:扩张状态观测器;电流预测控制;无差拍控制;永磁同步电机(PMSM)
永磁同步电机(permanentmagneticsynchronousmotor,PMSM)具有功率密度高、结构简单、高效率和高转矩比等优点,因此在运动控制领域得到了广泛应用[1].对于电机控制系统来说,电流内环性能是制约整个控制系统动态品质的核心因素,但由于电机模型存在非线性问题,传统的线性控制算法,如PI控制[2-5],不能满足高精度伺服控制场合对电机较高性能的要求.
近年来,电流预测控制(currentpredictivecontrol,CPC)算法逐渐成为学者的研究热点.采用预测控制相比于传统PI控制方法可以得到更高的动态响应性能和更小的谐波分量.目前,在电机控制领域中,最常见的预测控制方法是采用拉格朗日差值的无差拍电流预测控制算法.该算法将当前采样周期的电流给定作为下个采样周期电流的预测值,认为在下一个周期内电流能够无差拍地跟随给定.在实际系统中,由于存在模型参数失配和不确定性的问题,实际电流与预测电流相比可能会有误差,这会引起控制系统中的电流和转矩波动,进而影响控制性能.
为了解决上述问题,Roberto等[6]提出采用逆变器当前周期转矩和磁链状态来计算最优空间矢量的预测控制方法,减小转矩波动,但是模型较复杂,不便于工程应用.Oh等[7]提出通过估算电机反电势的方法来减小电流纹波,但是由于需要外接电压谐振逆变器,硬件结构较复杂.Weigold等[8]通过逆变器每个开关周期的电流梯度来辨识电机模型并实时修正控制器参数,减小了电流抖动,但因为使用多个采样周期的数据,可能会造成误差的累积.Zhu等[9]通过额外增加一个电压矢量的方法来优化控制器输出,能够有效地减少电流和转矩脉动,但需要精确的电机参数信息,不便于大范围应用.Wang等[10]提出通过多个周期内交、直轴电流差值来估算电压电流稳态误差并进行补偿的方法,可以有效地减少电流扰动,但需要多个周期的稳态数据,系统动态响应可能受限.Angelone等[11]将结合电流磁通非线性关系的模型引入控制器中,实现了最大转矩的快速追踪,但是存在计算模型复杂的问题,同时通用性欠缺,在不同电机工况下须重新整定参数.
在上述学者研究的基础上,本文提出基于扩张状态观测器(extendedstateobserver,ESO)的永磁同步电机电流预测控制算法.通过构造一个不依赖于具体数学模型的扩张状态观测器来观测系统的电流、电压、负载等影响系统控制性能的所有内外扰动,对控制器参考输出电压进行补偿;为了减小实际系统电流与预测电流的误差,对交直轴电流进行观测,采用观测值对交直轴电流的预测值进行修正.实验结果表明,采用所提的预测控制方法能够较好地抑制电流抖动,提高稳态转速精度.
1传统PMSM无差拍电流预测控制算法
在PMSM控制系统中,电流环控制的主要作用是在保证系统稳定的前提下,尽可能地提高系统的动静态性能,使得电机实际输出的交直轴电流id、iq能够跟随速度调节器的输出给定以及直轴的参考输入idref*、iqref*.常规的PI电流调节器是通过在第k个周期内将速度调节器输出与实际采样电流的差值Δid、Δiq进行调制的方式来获得下个周期的参考电压矢量udref*、uqref*.电流预测控制是在第k周期内,采样得到当前周期电流id(k)、iq(k),并以参考电流给定值idref(k)*、iqref(k)*作为电流的预测量来计算当前周期需要施加的电压矢量udref(k)*、uqref(k)*,确保在下个周期时电流能够无差拍地跟随当前周期的给定值.传统的PMSM无差拍电流预测控制的系统框图,如图1所示.
永磁同步电机是一个多变量、强耦合、非线性的系统.在PMSM无差拍电流预测控制系统中,为了简化分析,忽略铁芯饱和、磁滞和涡流损耗,假设转子每相气隙磁动势在空间呈正弦分布.PMSM在同步旋转坐标系下的定子电压方程可以简化为

图1 传统PMSM无差拍电流预测控制系统框图Fig.1 Block diagram of PMSM dead-beat CPC control system
(1)

(2)
式中:id、iq、ud、uq分别为定子交直轴的电压和电流;R为定子电阻;Ld、Lq分别为交、直轴电感,对于表贴式永磁同步电机有Ld=Lq=L;ψf为永磁体磁链;ω为电机电角速度.
根据PMSM电压方程可知,当采用id=0控制时,选择交直轴电流为状态变量,可以构造PMSM如下式所示的状态空间函数:
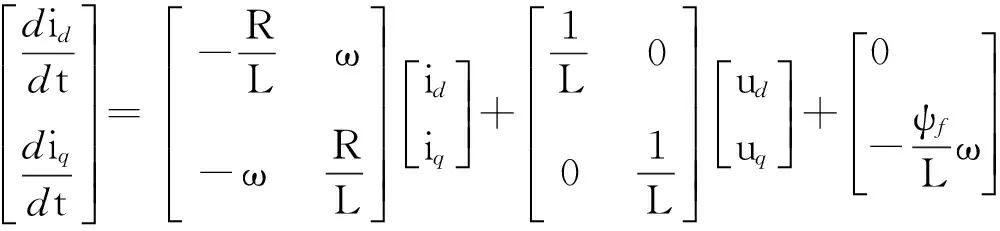
(3)
取x=[id,iq]T,u=[ud,uq]T,d=[0, -ψfω/L]T.将式(3)表示为标准的矩阵形式,如下:

(4)
式中:
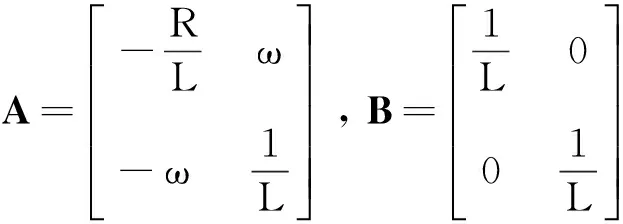
在数字控制系统中,由于采样时间T很小,可以认为u在kT~(k+1)T内恒定不变,由于电机旋转电动势d的变化相对于电流环来说较缓慢,认为电机旋转电动势d在一个采样周期内保持不变.可以求得式(4)在离散化状态下的通解为
x(k+1)=Aφx(k)+A-1(Aφ-I)Βu(k)+
A-1(Aφ-I)d(k).
(5)
式中:

由于采样时间T足够小,可以作出如下式所示的近似:
(6)
根据式(5)、(6)可以求得离散化PMSM的电流预测模型:
x(k+1)=F·x(k)+Gu(k)+H(k).
(7)
式中:

根据式(7)可知,若将当前周期参考电流给定值idref(k)*、iqref(k)*作为下一周期的电流预测值id(k+1)、iq(k+1),则认为在下个周期电流能够无差拍地跟随当前周期的给定.可以求得同步旋转轴系下的PMSM定子参考电压计算公式:

(8)
2扩张状态观测器电流预测控制算法
式(7)中,传统无差拍预测控制简单地认为下个周期id(k+1)、iq(k+1)能够完全跟随当前周期的电流参考输入给定idref(k)*、iqref(k)*.若实际系统中电流没有完全跟随给定值,则会造成控制器的控制效果与理想状态有所差别,这样会使得计算模型存在误差,容易造成电流抖动的问题.
为了解决该问题,通过状态观测器观测实际系统的交直轴电流,对预测电流进行修正;用ESO构造扩张状态量,对系统内、外扰动进行估计,用于修正参考电压输出.
根据状态观测器的理论[12]可知,将电机的交直轴电压和电流作为状态观测器的输入输出量.令X1=[id,iq]T作为观测器状态变量,U=[ud,uq]T作为观测器输入,Y=[ud,uq]T为观测器输出,得到PMSM电流状态方程表达式:
(9)
式中:f(X1)=-X1R/L+[ωiq,-ψfω/L]T,b0=[0,1/L]T,W表示PMSM控制系统的未知外扰.
在PMSM控制系统中,由于电感L参数摄动和旋转电动势项的影响,使得系统强耦合和非线性现象严重.如果将包含电感L和非线性等影响的f(X1)看作PMSM控制系统内部扰动,并与其他未知外扰W一起扩张成一个新的状态变量X2:
X2=f(X1)+W,
(10)
那么可以构造如下式所示的扩张状态观测器:
(11)
式中:
E为电流观测误差;Z1为对PMSM交直轴电流X1的估计,Z2为对PMSM控制系统所有内、外扰动X2的估计;α、β1、β2、δ为观测器参数.
通过ESO观测器可以得到观测值Z1,用于对预测的交直轴电流idref*、iqref*进行修正;观测值Z2用于对输出参考电压udref(k)*、uqref(k)*进行实时补偿,可以有效地减少系统扰动.
在实际的PMSM数字化控制中,因为ud(k)、uq(k)无法在当前周期中直接测量得到,在计算第k个周期的Z1(k)、Z2(k)时,使用第(k-1)个周期的参考电压输出ud(k-1)*、uq(k-1)*作为第k个周期的输入.
根据式(11)可知,当采样周期为T时,可得Z1、Z2的离散化方程为
(12)
计算得到Z1、Z2后,引入权重因子γ,对预测电流进行修正.算法中,预测电流由速度调节器输出给定和Z1观测值共同组成,预测电流的表达式为

(13)
式中: Z1d、Z1q分别为Z1在交、直轴的电流观测量.
将式(13)代入式(8),可以得到ESO预测控制算法的定子参考电压公式:

(14)
Z2可以作为系统扰动补偿量修正参考电压,补偿后最终输出的交直轴参考电压计算公式为

(15)
式中:Z2d、Z2q分别为Z2在交、直轴的扰动观测量;kp为修正系数,表征对扰动量修正的程度.
根据推导出的数学模型,得到ESO电流预测控制算法结构图,如图2所示.
3实验结果及分析
以TMS320F28335为核心,搭建PMSM实验平台,如图3所示.电流采样频率及PWM开关频率均为10kHz,采样周期T=0.000 1s,死区时间为3μs,编码器线数为5 000,转子转动惯量为0.000 182 (kg·m2),负载转矩由磁滞测功机提供.实验所用电机的具体参数如表1所示.表中,Pe为额定功率,Te为额定转矩,I为额定电流,N为额定转速,P为极对数,R为定子相电阻,L为等效同步轴电感.
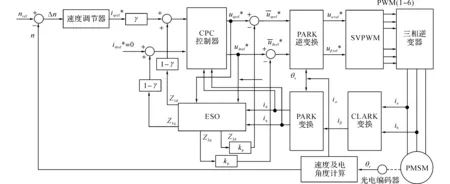
图2 基于ESO电流预测控制算法结构图Fig.2 Block diagram of CPC algorithm based on ESO
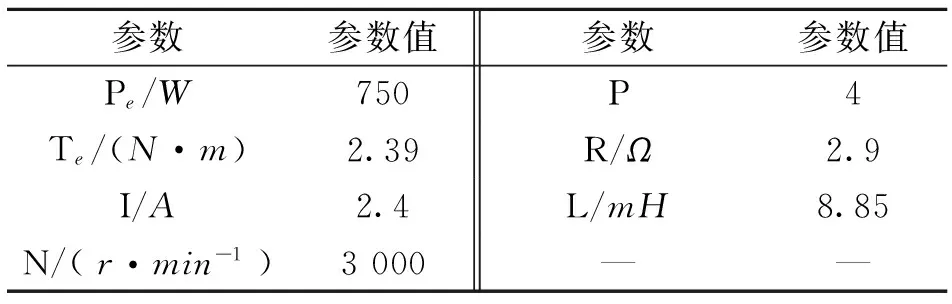
参数参数值参数参数值Pe/W750P4Te/(N·m)2.39R/Ω2.9I/A2.4L/mH8.85N/(r·min-1)3000——
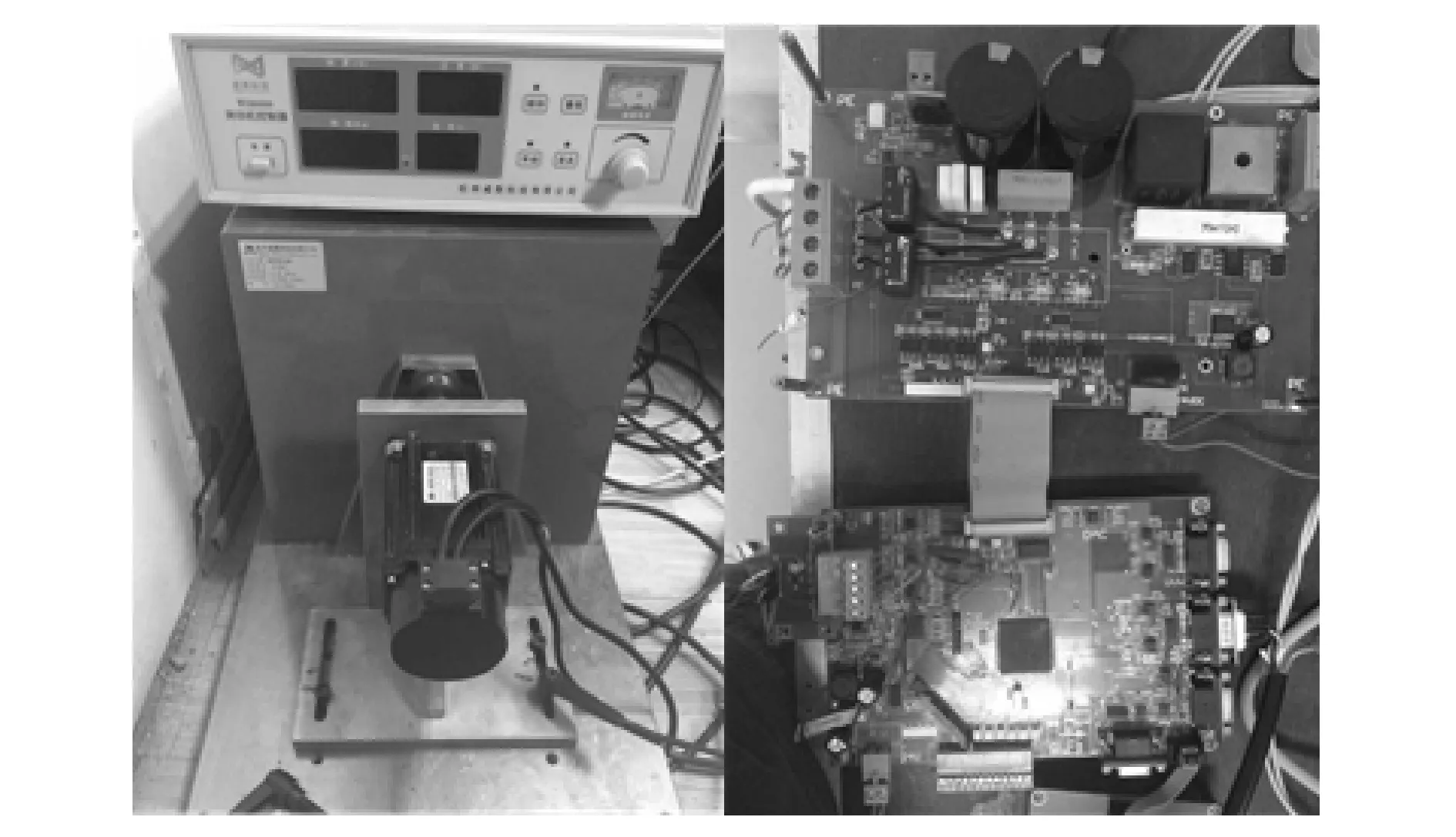
图3 永磁同步电机实验平台Fig.3 PMSM test bench
在实验中,观测器及其他相关参数设置如下:α=0.6,γ=0.5,δ=5T=0.000 5,β1=1/(10T)=100 000,β2=10β1=1 000 000,kp=0.48b0=0.004 25.
为了验证该算法的性能,分别对传统无差拍控制、加入交直轴观测电流补偿Z1、加入系统内外扰动补偿Z2和同时加入Z1、Z2的算法进行实验.给出电机相电流、q轴电流波形图,定子坐标系αβ轴下的电流轨迹图以及转速阶跃响应的波形图.
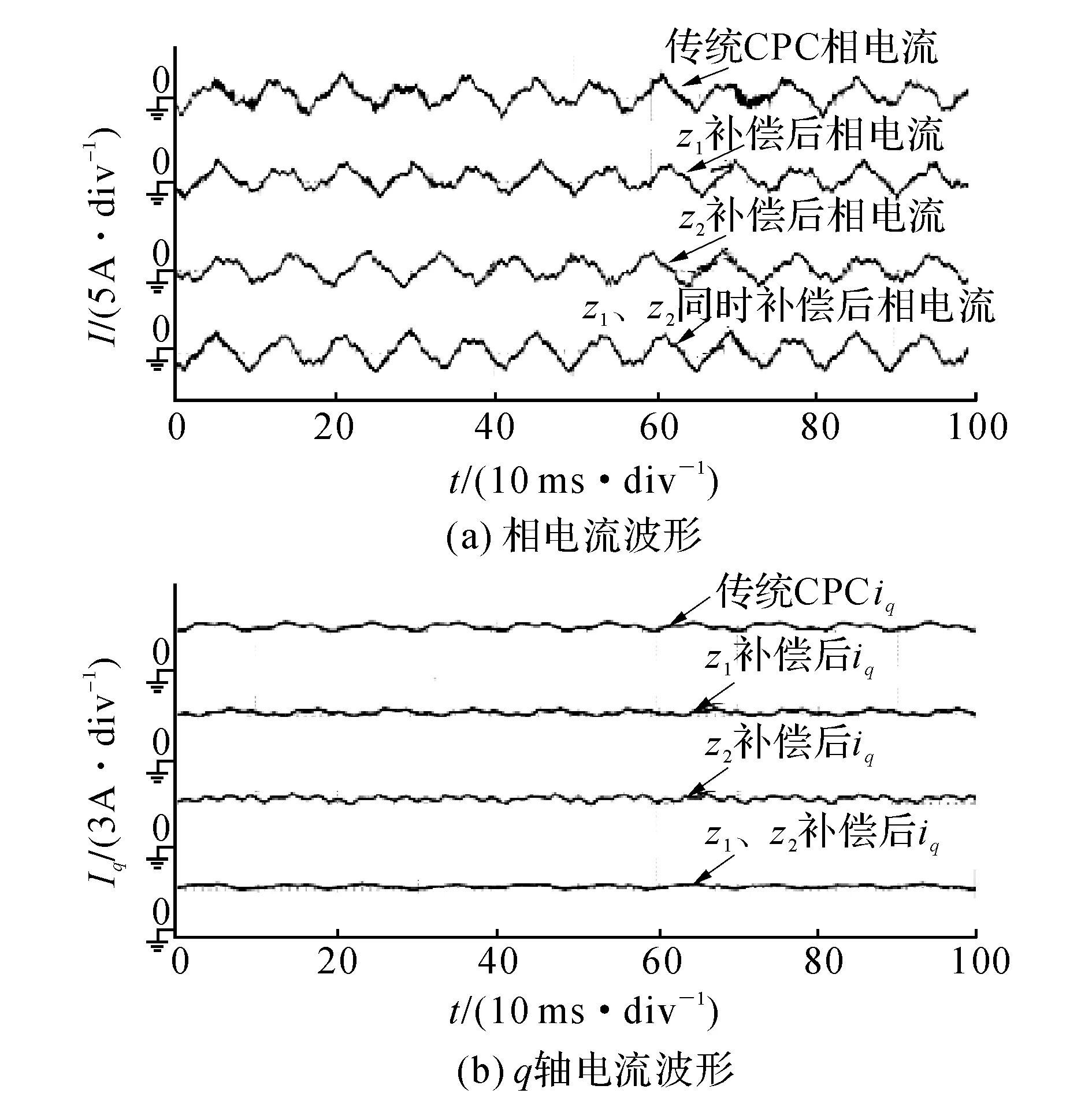
图4 Z1、Z2补偿前后相电流、交轴电流波形Fig.4 Waveform of phase current and q axis current with and without Z1、Z2 compensation
如图4所示为补偿前、后的相电流I,q轴电流的实验波形.由图4可见,传统CPC控制时,电流波形较差,加入交直轴观测电流Z1补偿时,相电流有所改善,相对波动减小,同时交轴电流抖动幅值有一定的缩减,对电流扰动有一定的抑制作用;在加入Z2扰动修正补偿后,相电流和交轴电流有较大的改善,这是由于Z2对整个系统的所有扰动进行了补偿,效果略好于单独的Z1补偿;当同时加入Z1、Z2补偿后,能够较好地抑制传统电流预测控制的电流波形畸变,加入Z1、Z2共同补偿后的补偿效果较各自单独的补偿效果好,扰动量最小.
如图5所示为补偿前、后定子坐标系αβ轴下的电流轨迹图.图中,Iα、Iβ分别为α、β轴电流.

图5 Z1、Z2补偿前、后αβ轴电流轨迹Fig.5 Current trajectory of current in αβ coordinates with and without Z1,Z2 compensation
由图5可见,传统无差拍控制时的电流扰动量很大,电流轨迹毛刺较多;加入Z1补偿以后,观测电流对预测控制中的电流进行修正,电流抖动的幅值减小,电流轨迹环的效果有所改善;在加入Z2补偿以后,效果较Z1单独补偿时有明显的提高,大部分干扰都有所削减,电流轨迹环更加趋近于一个圆;当Z1、Z2同时加入控制器中进行补偿时,效果最佳.
如图6所示为补偿前、后0~3 000r/min转速阶跃响应波形图.图中,n为转速.
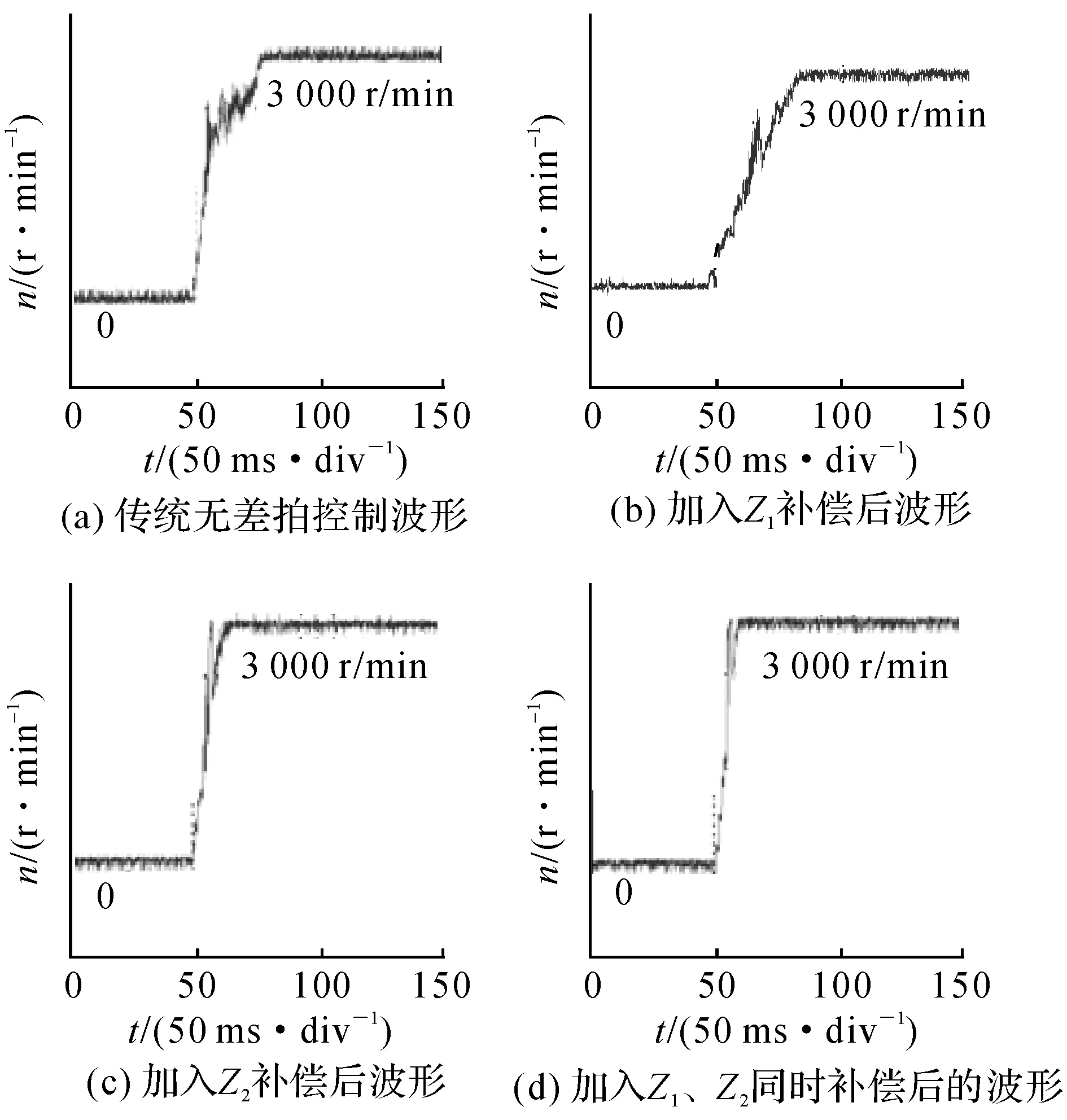
图6 转速阶跃响应波形Fig.6 Waveform of speed step response
由图6可见,传统无差拍控制由于电流抖动严重,造成稳态转速波动以及转速上升阶段的转速抖动.在加入Z1补偿后,上升阶段转速抖动变缓,稳态波动毛刺减少,但加速阶段略有抖动,这是由于观测器未到稳态,加入的Z1补偿值是从0开始上升,初始阶段值较小,由于权重影响使得参考输入变小.在加入Z2补偿后,阶跃响应加速时间明显缩短,转速波动量大幅减小.随着Z1、Z2的同时加入,转速阶跃响应的效果达到最佳,加速时间最短,同时稳态转速精度更高.
5结论
(1)传统的无差拍电流预测控制用非线性控制器替代传统的PI控制器,但会造成实际电流不能完全跟踪给定的问题.
(2)基于扩张状态观测器的电流预测控制算法能够较好地抑制电流失配带来的抖动问题,提高稳态运行的转速精度.
参考文献(References):
[1]孙宇,王志文,孔凡莉,等.交流伺服系统设计指南[M] . 北京:机械工业出版社,2013: 11-37.[2]LISH,GUH.FuzzyadaptiveinternalmodelcontrolschemesforPMSMspeed-regulationsystem[J].IEEETransactionsonIndustrialInformatics,2012,8(4):767-779.
[3]ZHUM,YANGCL,LIWL.AutotuningalgorithmofparticleswarmPIDparameterbasedonD-Tentchaoticmodel[J].JournalofSystemsEngineeringandElectronics, 2013, 24(5): 828-837.
[4]HANHC,HONGMY,YONGK.ImplementationofevolutionaryfuzzyPIDspeedcontrollerforPMsynchronousmotor[J].IEEETransactionsonIndustrialInformatics, 2015, 11(2): 540-547.
[5]MORELF,LINSHIX,RETIFJM.Acomparativestudyofpredictivecurrentcontrolschemesforapermanentmagnetsynchronousmachinedrive[J].IEEETransactionsonIndustrialElectronics, 2009, 56(7): 2715-2728.
[6]ROBERTOMC,PACASM.Apredictivetorquecontrolforthesynchronousreluctancemachinetakingintoaccountthemagneticcrosssaturation[J].IEEETransactionsonIndustrialElectronics, 2007, 54(2): 1161-1167.
[7]OHIH,JUNGYS,YOUNMJ.Asourcevoltage-clampedresonantlinkinverterforaPMSMusingapredictivecurrentcontroltechnique[J].IEEETransactionsonPowerElectronics, 1999, 14(6): 1122-1132.
[8]WEIGOLDJ,BRAUNM.Predictivecurrentcontrolusingidentificationofcurrentripple[J].IEEETransactionsonIndustrialElectronics, 2008, 55(12): 4346-4353.
[9]ZHUH,XIAOX,LIYD.Torqueripplereductionofthetorquepredictivecontrolschemeforpermanent-magnetsynchronousmotors[J].IEEETransactionsonIndustrialElectronics, 2012, 59(2): 871-877.
[10]WANGG,YANGM,NIUL.StaticerroreliminationalgorithmforPMSMpredictivecurrentcontrol[C]∥Proceedingsofthe33rdChineseControlConference.Nanjing: [s.n.], 2014.
[11]ANGELONEG,PIZZOAD,SPINAI.ModelpredictivecontrolforPMSMwithflux-currentnonlinearmaps[C]∥InternationalSymposiumonPowerElectronics,ElectricalDevices,AutomotionandMotion.Ischia: [s.n.], 2014.
[12] 韩京清. 自抗扰控制技术[M]. 北京: 国防工业出版社, 2008: 183-239.
收稿日期:2015-06-26.浙江大学学报(工学版)网址: www.journals.zju.edu.cn/eng
基金项目:国家自然科学基金资助项目(51177150);国家“973”重点基础研究发展规划资助项目(2013CB035604);浙江省公益性技术应用研究计划资助项目(2015C31125);浙江省自然科学基金资助项目(Y14E070011).
作者简介:张明晖(1991-),男,硕士生,从事高精度伺服控制系统研究. ORCID: 0000-0001-5210-597X. E-mail: jn6067@zju.edu.cn 通信联系人:杨家强,男,副教授. ORCID: 0000-0002-3822-3301. E-mail: yjq1998@163.com
DOI:10.3785/j.issn.1008-973X.2016.07.023
中图分类号:TM 315
文献标志码:A
文章编号:1008-973X(2016)07-1387-06
Currentpredictivecontrolmethodbasedonextendedstateobserverforpermanentmagneticsynchronousmotor
ZHANGMing-hui,YANGJia-qiang,CHENLei,LOUJia-yu
(College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China)
Abstract:A new current predictive control method based on extended state observer was proposed to reduce the disturbance of traditional dead-beat strategy, which was caused by parameter mismatch and model uncertainty. The math model of extended state observer was established based on the traditional dead-beat control. Then dq axis currents were observed, and both internal and external disturbance were estimated. The observed DQ currents were used to amend reference currents with the help of weight factor. Reference voltages can be regulated by disturbance estimation. Experiments between traditional dead-beat control and improved method were conducted. Results demonstrate that the ripple of current and torque can be effectively reduced, and the steady-state speed precision can be improved.
Key words:extend state observer; current predictive control; dead-beat control; permanent magnetic synchronous motor (PMSM)
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
