基于AMR磁阻传感器的无线车位检测设计*
2016-08-01 07:19庞家成徐新民
网络安全与数据管理 2016年12期
庞家成,徐新民
(1.杭州科技职业技术学院 信息工程学院,浙江 杭州 311402;2.浙江大学 信息与电子工程学院,浙江 杭州 310058)
基于AMR磁阻传感器的无线车位检测设计*
庞家成1,徐新民2
(1.杭州科技职业技术学院 信息工程学院,浙江 杭州 311402;2.浙江大学 信息与电子工程学院,浙江 杭州 310058)
摘要:设计了以AMR磁阻传感器采集车位节点信号,通过ZigBee无线传感组网,以STM32F10X微控制器为协调器收集并分析处理信号的装置来检测车位的占用情况,最终将检测结果通过串口传输到上位机进行显示。在设计过程中充分考虑了器件的低功耗模式。通过对地下车库车位的实地测试验证,有效检测率在96%以上。
关键词:磁阻传感器; ZigBee ;车位检测 ;多状态机算法
引用格式:庞家成,徐新民. 基于AMR磁阻传感器的无线车位检测设计[J].微型机与应用,2016,35(12):28-30,34.
0引言
如今,探索车辆的有效检测技术及有效调度利用城市有限的停车位资源是研究的热点之一。在大型场所车辆有线检测诸存在多不便,而构建无线传感通信网络便于安装调试[1]。现有的超声波检测技术,其多次回波使得传感器的误差较大;红外探测技术受环境光源、热源变化的影响,误判率高;而地感线圈检测较为可靠,但其安装对路面造成破坏,施工麻烦,且线圈本身容易被锐器或硬物损坏,降低寿命,维护成本高[2]。而磁阻传感器体积小,对弱磁场反应灵敏,不易变形损坏,安装简单,受环境影响小,故本设计车辆检测传感器采用Honeywell公司的两轴磁阻传感器HMC1022进行车辆信号采集。
1AMR磁阻传感器原理及应用
物质在磁场中电阻发生变化的现象称为磁电阻效应,对于强磁性金属,当外加磁场平行于磁体内部磁化方向时,电阻几乎不随外加磁场而变;当外加磁场偏离金属的内磁化方向时,金属的电阻减小,这就是各向异性磁电阻效应,如图1所示。
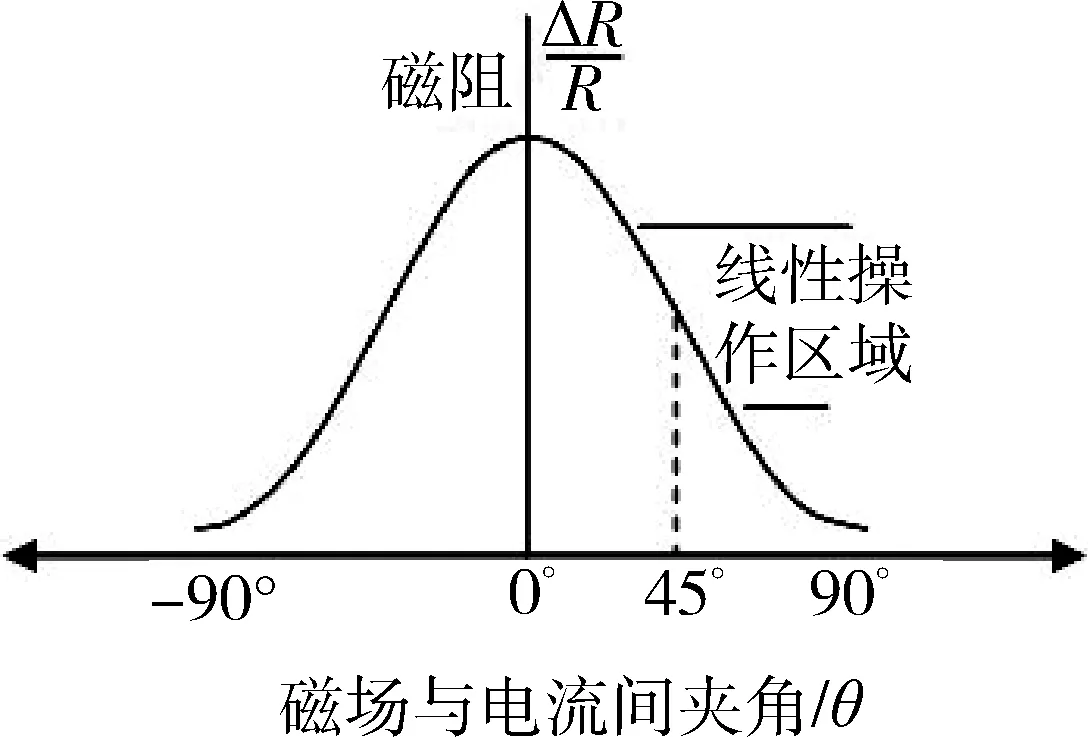
图1 磁阻与θ角度关系
从图1可以看出,磁阻效应与磁化强度M和电流I方向的夹角有关,如式(1)所示:
R(θ)=R⊥sin2θ+R‖cos2θ
(1)
在图1中,磁场与电流相互平行时阻值变化最敏感,而夹角为45°左右时,阻值的变化接近线性[3]。
1.1AMR磁阻传感器原理
HMC1022由4个镍铁合金薄膜电阻构成的惠斯通电桥组成[4],电桥4个臂阻值随外加磁场与内部磁化方向的夹角而变化。电桥输出差分电压如公式(2)所示:
Vout=(ΔR/R)×Vb
(2)
由公式(2)可见,在磁场为正负6 G时变化大致为线性关系。
1.2AMR磁阻传感器置位与复位
在强磁场的作用下,HMC1022内部磁筹将被磁化,测量精度下降,须使用置位复位电路进行消磁。在传感器的置位复位端加一个0.5 A的电流脉冲即可消磁[5-6]。
2车辆对地磁扰动的数学模型
在一定范围内地磁场的磁场强度为0.5 G~0.6 G[7]。车辆会扰动磁通线弯曲,改变磁感应强度。其数学模型可以简化为一个双极性磁铁,磁矩m在汽车中心并且平行于地磁场。m产生的磁分量为Bx、By、Bz[8],如式(3)、(4)、(5)所示。
(3)
(4)
(5)
由式(3)、(4)、(5),推导出此情况下磁感应强度表达式为[9]:
(6)
由以上公式看到,汽车产生的磁场扰动与其大小、形状以及与传感器之间的距离等具有较强的相关性。
3车辆检测节点硬件设计
3.1系统设计结构图
HMC1022采集车位节点信号,通过CC2530芯片进行ADC转换,数据处理后由ZigBee无线传感组网,发送数据信号给STM32F10X微控制器,并分析处理信号来检测车位的占用情况,检测结果在上位机上显示。原理框图如图2所示。
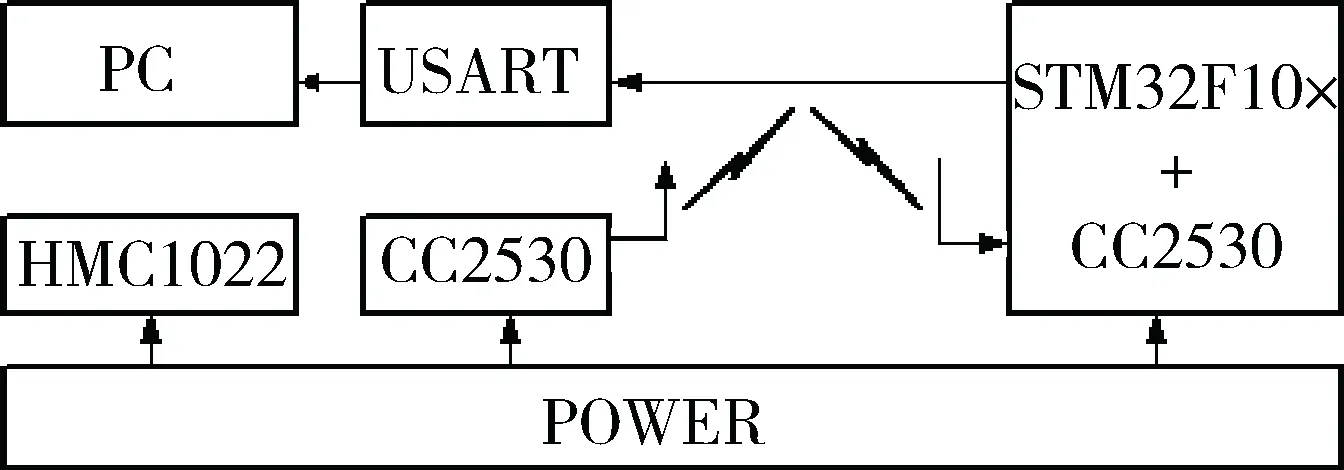
图2 系统硬件框图
3.2HMC1022接口电路
HMC1022接口电路设计如图3所示。
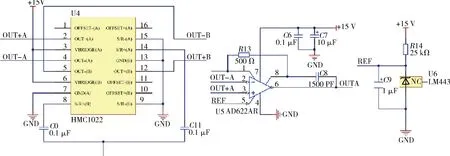
图3 HMC1022信号放大接口电路
在图3中,HMC1022输出信号分别为OUTA和OUTB,两路信号分别通过AD622进行小信号放大。AD622的增益选择满足式(7):
(7)
其中,RG即所选择阻值,G为期望增益。参考端对输出引入精密补偿,从而获得最佳的共模抑制。

图4 HMC1022置位/复位电路
3.3AMR传感器置位/复位电路
HMC1022磁阻传感器所能测量磁场强度为±6 G,设计置位复位电路进行消磁,电路如图4所示。
在图4中,考虑低功耗因素,由AMR_RST引脚产生周期为50 ms、宽度为4 μs的脉冲,并通过IRF7105放大为0.5 A。
4车辆检测软件设计
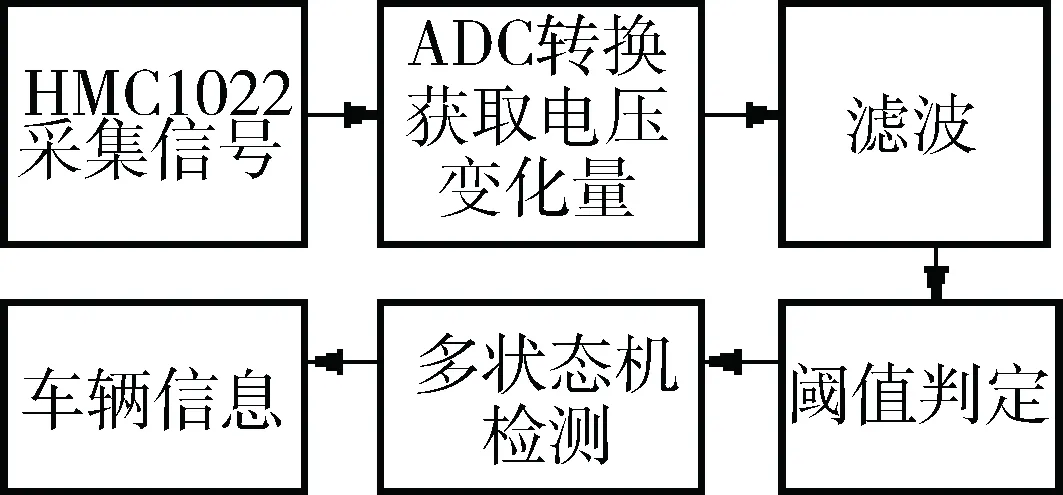
图5 车辆检测软件流程
采集的信号经过ADC转换及处理后得到电压的变化量ΔV,然后进行滤波处理,通过阈值处理及多状态机检测算法确定车辆有无信息。软件设计流程如图5所示。
4.1信号平滑滤波处理
由于背景噪声的存在,测量数据有干扰毛刺,为有效判定数据,需要对信号进行滑动均值滤波处理[10]。
滑动均值滤波是指对连续采样的m次数据进行平均值计算。如公式(8)所示,其中a(n)为m次数据平均值,g(n)为实时采样值数据。
(8)
每采样一次数据就能计算出一次均值,保证了实时性。
4.2多状态机的车位检测算法
多中间状态的状态机如图6所示[11]。其中包括5个状态:nocar、car、count1、count0和count00,输入为u(k),其中间状态为count0、count00,输出为 car、nocar。
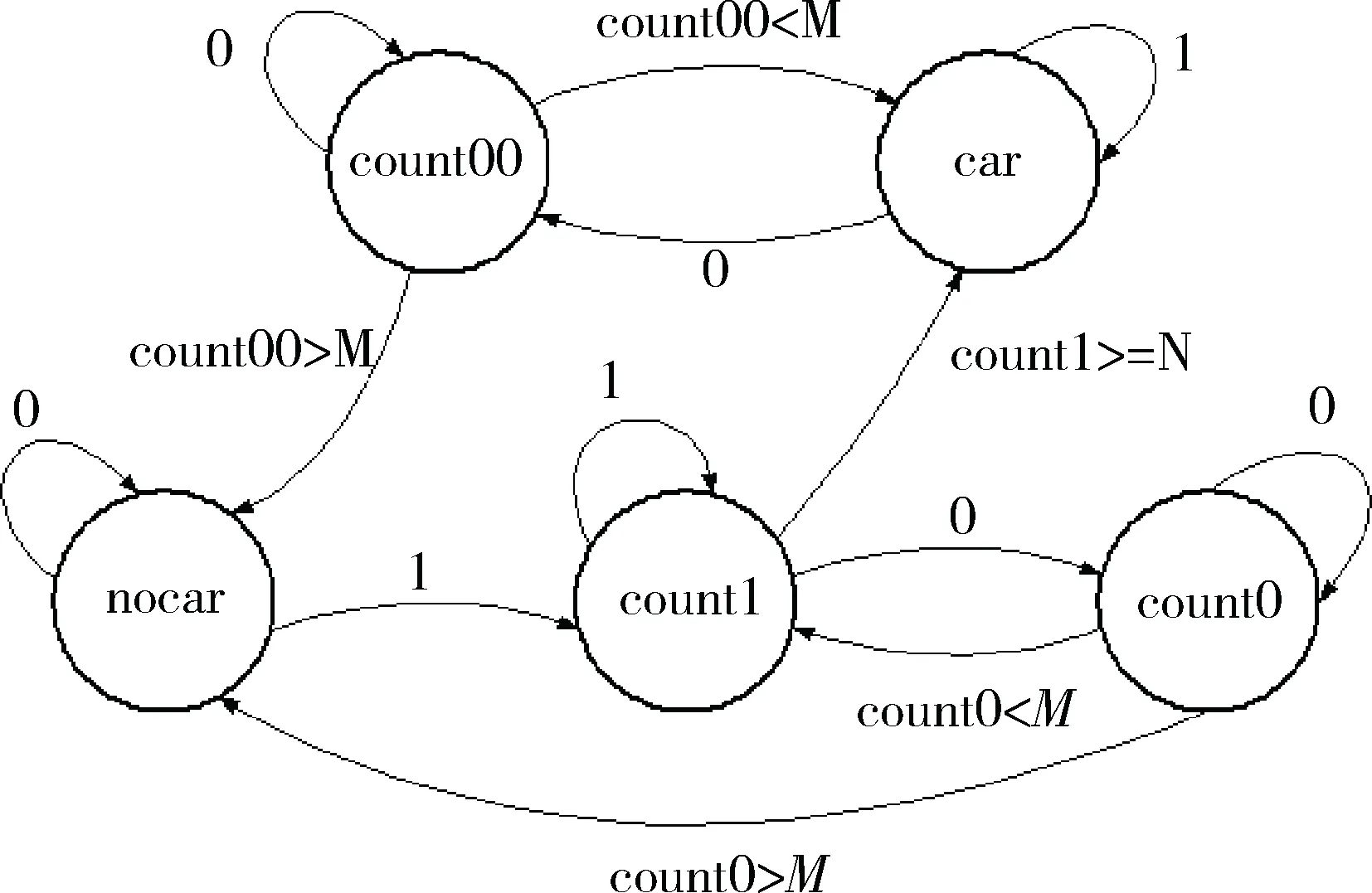
图6 状态机算法流程图
此算法不仅能判断车辆何时进入检测区,还可检测车辆离开检测器的中间状态,能够更好地从时间序列中提取车辆信息[12]。

图7 ZigBee组网流程图
4.3AMR终端节点组网
CC2530带有Z-STACK协议栈,节点作为路由器和终端,由STM32F10X构成协调器,组建ZigBee树形网络拓扑结构,允许其他节点加入网络。协调器组网流程如图7所示。
组网成功后,协调器可以搜索是否有新节点加入,并为新节点分配网络地址,之后每隔一段时间采集一次数据,并主动直接或通过路由器向协调器发送采集的数据。协调器将数据分析后传输给PC。
5车辆检测实验数据分析
实验样机在地下车库进行了相关的数据测试,车辆沿X敏感轴以20 km/h的速度驶过节点,共测试了40组数据,采集到的原始电压变化量ΔV(单位为V)如图8所示。
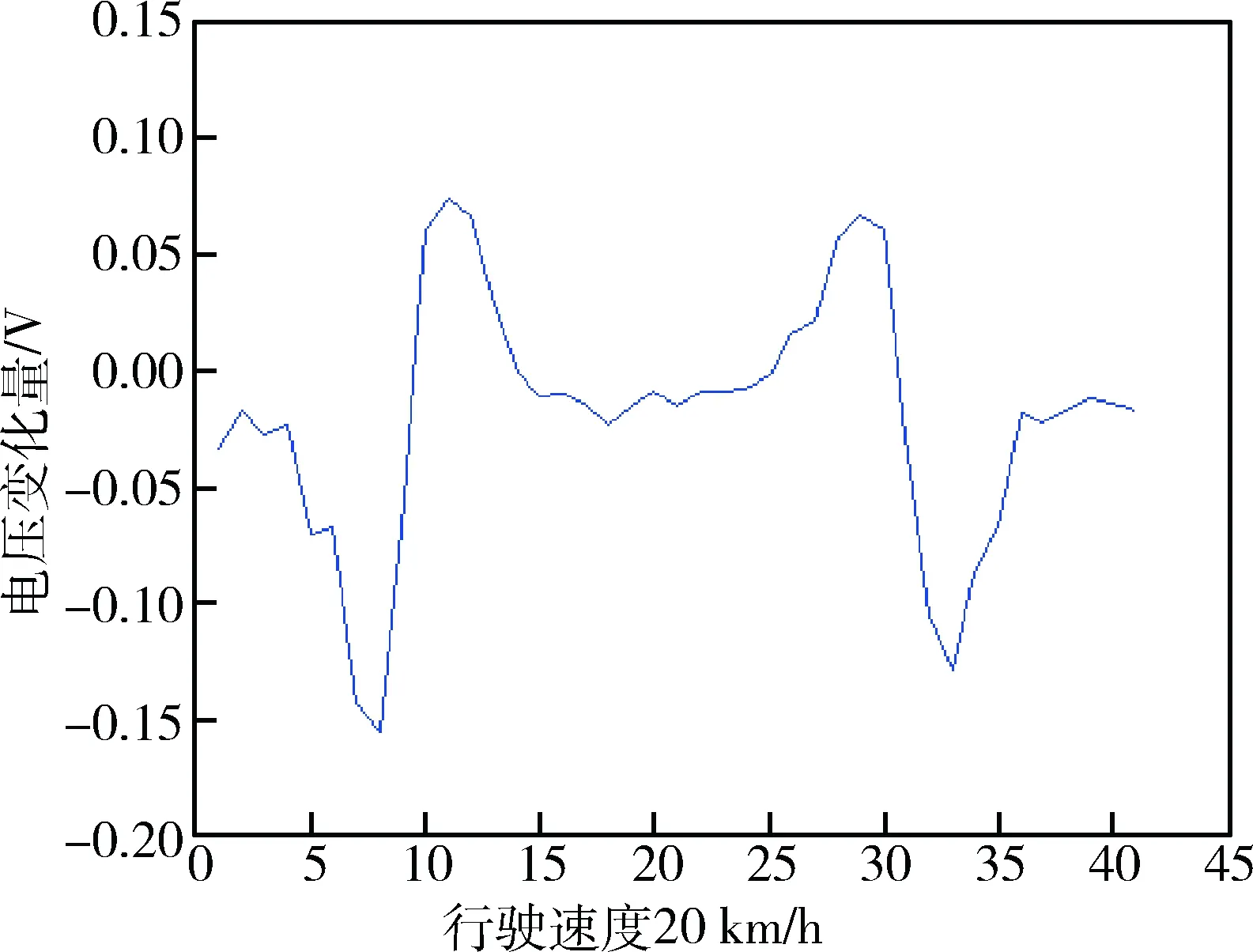
图8 实验原始数据图
通过对原始数据进行滑动均值滤波后得到如图9所示数据图。
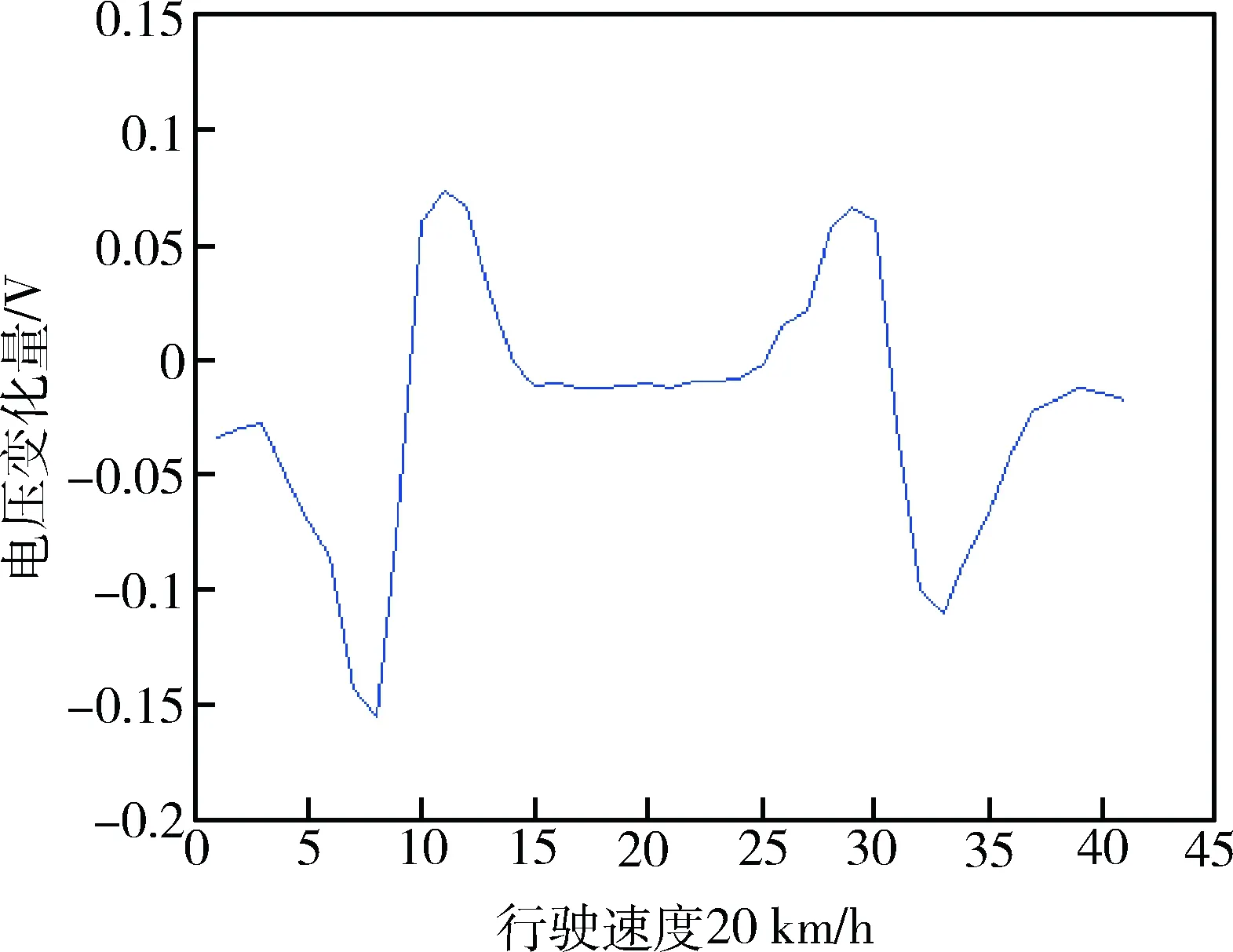
图9 滑动均值滤波后数据图
由图9可以看出,车辆的两个轮毂及发动机引起两次电压显著变化,通过多状态机算法即可判定车辆是否存在。与人工测量数据进行比较,分析误差结果,检测有效率在96%以上,其中误检测主要因为相邻车位消防栓、铁闸门等干扰所致。
6结论
本设计最终实现了车位占用情况的检测,在硬件选型、软件设计中均充分考虑了器件的低功耗模式。本设计依然存在不足,在节点的绿色能源充电方面也有待深入考虑。
参考文献
[1] 赵中琦,陈永锐,易卫东.基于磁阻传感器的无线车辆检测器[J].电子测量技术,2013,36(1):1-2.
[2] 彭春华,刘建业,刘岳峰.车辆检测传感器综述[J].传感器与微系统,2007,26(6):4-8.
[3] MICHAEL J C, BRATLAND T, SMITH C H, et al. A new perspective on magnetic field sensing[J].Sensors Magazine,1998(12):34-36.
[4] CARUSO M J, WITHAMWASAM L S. Vehicle detection and compass applications using AMR magnetic sensors[EB/OL]. (2009-06-05)[2016-02-22].http://www.ssec.honeywell.com.2014.7.
[5] Honeywell. Implementing a set-reset pulse circuit. Honey well Application Note[OL].[2016-02-22]HTTP://www.ssec.honeywell.com.
[6] HGoneywell. Set/reset function for magnetic sensors. Honey well Application Note[OL].[2016-02-22]http://www.ssec.honeywell.com
[7] 李胜希,于广华.各向异性磁阻传感器在车辆探测中的应用[J].北京科技大学学报,2006,28( 6):577-590.
[8] SIFUENTES E, CASAS O PALLAS A R. Wireless magnetic sensor node for vehicle detection with optical wake-up[J].IEEE Sensors Journal,2011,11(8):1669-1676.
[9] KANG M H,CHOI B W,KOH K C, et al. Experimental study of a vehicle detector with an AMR sensor[J]. Sensors & Actuators A Physical,2005,118(2):278-284.
[10] 赵毅.数字滤波的滑动平均法和低通滤波法[J].仪表技术,2001(5):40,46.
[11] KNAIAN A N.A wireless sensor network for smart roadbeds and intelligent transportation systems[D].USA:Masschusetts Institute of Technology,2000.
[12] 潘霓,骆乐,闻育.基于磁阻传感器的车辆检测算法综述[J].计算机工程与应用,2009,45(19):245-248.
*基金项目:2013浙江省访问学者专业发展项目(FX2013269)
中图分类号:TP212.9
文献标识码:A
DOI:10.19358/j.issn.1674- 7720.2016.12.010
(收稿日期:2016-02-22)
作者简介:
庞家成(1977-),通信作者,男,硕士,讲师,主要研究方向:单片机及嵌入式应用设计。E-mail:etjason@163.com。
徐新民(1964-),男,博士,副教授,硕士生导师,主要研究方向:汽车电子及嵌入式系统应用研究。
Design of wireless vehicle detector based on AMR sensor
Pang Jiacheng1,Xu Xinmin2
(1.Shool of Information and Engineering,Hangzhou Polytechnic,Hangzhou 311402,China;2.Collage of Information Science and Electronic Engineering,Zhejiang University,Hangzhou 310058,China)
Abstract:A device is designed to detect signals based on anisotropy of magneto resistance(AMR) sensor, using the ZigBee wireless sensor to build the network, and using the STM32F10X microcontroller as a coordinator to collect and analysis the signal and detect the occupation of parking spots. The final results are displayed on PC with the universal synchronous asynchronous receiver transmitter(USART). During the design, the low power consumption mode of the device is fully considered. The field test of underground garag shows that the effective detection rate is above 96%.
Key words:anisotropy of magneto resistance sensor;ZigBee;vehicle detector; state Machine algorithm