海洋石油平台附近已建海底管道探测方法概述
2016-08-01 08:28:33黄必桂雷方辉李家钢石新刚王俊勤
中国海洋平台 2016年3期
黄必桂, 雷方辉, 李家钢, 石新刚, 王俊勤, 李 强
(1.中海油研究总院, 北京 100027; 2.中国船舶信息中心, 北京 100101)
海洋石油平台附近已建海底管道探测方法概述
黄必桂1, 雷方辉1, 李家钢1, 石新刚2, 王俊勤1, 李强1
(1.中海油研究总院, 北京 100027; 2.中国船舶信息中心, 北京 100101)
摘要:受石油平台安全作业距离及平台结构物等影响,常规的物探方法较难实现对已建海上石油平台附近的海底管道进行探测。该文结合几个工程实例介绍了人工探摸、扫描声纳和ROV探测这三种调查方法,实现对平台附近已建管道的有效探测,并从调查原理、调查效果和影响因素等方面,分析这三种方法的优缺点,为平台附近已建海底管道调查提供支持。
关键词:海底管道探测;人工探摸;扫描声纳;ROV探测
0引言
随着国民经济的迅速发展,人们对石油的需求日益增大,海底油气输送管道越来越多,海底管道的安全问题越来越受关注[1]。同时随着新的海上油气储量的发现,石油开采技术的提高,依托已建海上设施进行新的油气田开发已经越来越频繁。已建石油平台附近存在较多错综复杂的海底管道,这些管道位置的确定对新平台位置布置、钻井船就位、新海管路由方案确定等有重大影响。因此,对已建石油管道进行探测,尤其对石油平台附近海底管道的探测越来越重要。
目前对已建海底管道探测的方法有很多,地球物理方法是海底管道探测最常用的方法,主要包括:单波束探测、多波束探测、浅地层剖面探测、侧扫声纳探测、海洋磁力探测等物探方法。其中单波束测深技术可以在浅水区对管道的位置、悬空状态和掩埋状况进行探测,但是对埋藏的管道和水深较深的海底管道的探测能力较差[2]。多波束测深是通过测量管道与海底面的相对高差来检测海底管道掩埋状况的,只能在一定的水深条件下使用,对尚未完全掩埋的海底管道,可以使用多波束测深技术确定管线位置和掩埋状况,对完全掩埋的海底管道无效[3]。浅地层剖面探测技术是一种通过声波或超声波探测的间接地球物理探测方法,该方法对有一定规模的海底管线的探测,无论其是否有掩护,探测效果都较好,特别是横向位置探测及埋深探测精度很高。但是,对于平面位置不明确的管线,较难确定海底管线的准确参数[4]。侧扫声纳技术是一种直接的显性探测技术,对于铺设于海底面以上的管线探测效果明显,成果直观、精度高、可靠性强,特别是对于有一定规模长度或有保护抛石基槽等辅助设施的海底管线,但是对海底掩埋的管线的探测效果较差[4,5]。磁力探测方法可以用来快速准确探明海底管线的平面位置和走向,且不受海底管线的埋深限制,由于磁法勘探的基础是海底管线与周围介质的磁性差异,这种差异容易受到管线埋深和周围介质的影响,且在纵向深度的探测精度也不十分准确。
上述方法对已建海底管道探测虽各有优劣,但将多种方法综合使用,探测效果却比较明显。然而在石油平台附近进行海底管道调查时,由于石油平台安全生产的要求,作业船舶很难靠近平台进行船载设备调查。同时受平台结构物对探测设备信号干扰等影响,平台附近100 m范围内的已建管道调查用常规物探调查方法较难实现。该文根据海洋石油开发过程中已建平台附近管道的实例,并参考其它行业的一些调查案例,分析人工探摸、扫描声纳调查和ROV调查对平台附近的已建管道的作业效果。
1人工探摸
1.1调查原理
用人工探摸方法调查平台附近的海底管道,通常由潜水员携带设备,从石油平台下水,在调查区域内进行拉网式巡回探摸。对调查范围内的海底设施、障碍物、异常物、海底表面异常状态进行定位并描述。
针对具体的管道探测,潜水员携带定位系统及吹泥设备从平台沿立管入水,沿海底管道进行探摸。利用定位系统对海底管道、电缆进行目视探摸,记录其确切的位置及走向,直至预定的检测区间。对非裸露区域的海底管道、电缆,潜水员利用吹泥设备进行吹泥作业,使其裸露以确定管道位置。
1.2应用实例
人工探摸方法在国内外已经有了一些实例,例如:2008年马来西亚巴贡电站采用潜水员成功对闸门槽进行探测[6];港珠澳大桥珠澳口岸人工岛扫海工程中,采用人工探摸方法针对部分重点异常区进行了调查[7]。在石油平台附近对已建海底管道的人工探摸,国内也是近几年才开始进行。下面以2011年在渤海辽东湾某油田为例,首次对已建平台附近的海底管道进行人工探摸作业。
人工探摸作业要求对平台附近的海底电缆和管道的位置和埋深进行详细调查,对重点部位进行水下照相。调查作业水面定位导航系统采用DeltaFix LR差分定位系统、Starfix-HP差分定位系统。水下定位采用Sonardyne USBL超短基线水下定位系统来跟踪在水下作业的潜水员。该系统要DeltaFix DGPS差分系统或Starfix-HP差分系统和 GNS II 综合导航系统进行配套工作。
作业前先进行水下定位系统安装和校正,如图1所示。USBL水下定位系统接收机安装在平台桩腿面向海底管线、电缆及平台调查定位的区域,USBL接收器固定在可旋转的支架上,入水3 m~5 m。有关支架尺寸根据平台尺寸、船型来确定。在进行正式潜水作业前,需要对USBL水下定位系统进行系统校正。此后潜水员携带设备,由平台下水进行管道探摸作业。

图1 水下定位系统安装示意图
通过人工探摸,详细确定了该平台附近的海底管道电缆的准确位置、埋深状况以及海底管道压块的位置,如图2所示。从人工探摸结果可以看出,人工探摸方法探测平台附近的海底管缆,效果较好。
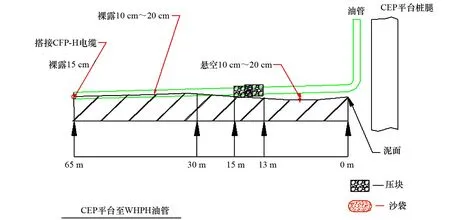
图2 平台附近电缆管道人工探摸结果
1.3人工探摸方法优缺点分析
人工探摸方法以人工目测为主,结合定位设备、水下照相/摄像设备开展调查,调查结果较为准确。尤其针对已建平台附近区域,海底管道大都没有埋设(用压块保护),便于潜水员识别管道位置。此外,水上支持人员可以依托石油平台,将支持系统放置在平台上,使得调查作业过程较为简便。
然而人工探摸也存在一些缺点:(1) 靠潜水员水下移动确定目标,使得作业效率不高;(2) 以人为目测为主,对海水浑浊度有要求;(3) 由于是人工下水作业,对水深、海况、海水温度要求较高,且一次作业时间不能太长;(4) 对埋深较深的海底管道较难发现。
2扫描声纳调查
2.1调查原理
扫描声纳是一种主动声纳,利用发射基阵向水中发射声脉冲,通过这些脉冲对水下目标进行测距、定位以及识别。该文中的扫描声纳采用连续发射调频波测距法来测距,当发射信号遇到目标时,产生回波;利用发射频率、回波频率、声速、调频周期等,即可确定目标物与声纳的距离,从而辨识目标物的位置。
2.2应用实例
目前,国内应用实例有用扫描声纳探测桥墩水下结构和越江管道调查[1,8],海洋石油平台附近管道于近年才开始应用扫描声纳调查。
下文将介绍2012年渤海中部某石油平台附近用扫描声纳进行已建管道调查的实例。
(1) 调查/定位设备
挪威产的MS1000扫描声纳系统包括MS1000扫描声纳、甲板单元和图形处理单元。其中MS1000扫描声纳的量程为0.5 m~150 m,由于渤海海域海底管道多挖沟埋设,只有近平台约100 m范围内会出现出露,因此,近平台调查设定距离为100 m,且保证该距离分辨率能够满足海底管道探测的需求。MS1000扫描声纳最大作业水深为3 000 m,可360°扫描。
定位设备采用DeltaFix DGPS差分定位系统对作业石油平台和设备进行定位测量,设备主要有VeriPOS DGPS、Sonardyne超短基线、电罗经及声速计。
(2) 作业步骤
对平台进行定位,确定平台艏向及各桩腿位置,将MS1000探头连同固定支架释放到海底,通过电缆与平台上设备相连。开机对海底地貌进行数据采集,扫描半径依次设置为10 m、20 m、25 m、50 m、75 m和100 m,分别进行数据记录和保存图像资料。若该平台的多个侧面均有海底管道,则需在有海底管道的一侧重复测量,以查清进出该平台的所有海底管道。
(3) 调查成果
教室可以利用传统节日开展传统文化教学活动,调动学生的积极性,使学生深刻感受到传统文化的魅力。例如在《水调歌头》的教学中向学生渗透关于中秋的优秀传统文化,让学生体会作者借月之圆缺喻人离合的思想感情,在与杜甫的《八月十五夜月》作对比,让学生理解作者借象征团圆的十五月圆夜反衬自己漂泊在外的羁旅愁思,激发学生热爱祖国、热爱幸福生活的情感。在学习《端午的鸭蛋》中,让学生通过课本的学习培养善于观察生活细节的习惯,激发学生对儿时生活的怀念和对故乡的热爱,增强学生的民族自豪感。在传统节日来临之际,让学生查阅相关资料,在节日的氛围中感受中华民族的传统习俗,有效地传承中华民族的传统文化。
通过对MS1000扫描声纳“雷达式”图形文件中所有海底管道信息的辨识、采集,最终获得以调查平台为中心的100 m半径范围内海底管道的分布特征、海底管道的位置信息以及出露情况,并最终绘制出已建平台附近MS1000扫描声纳海底管道调查成果图,如图3所示。从图3中可以准确地看出平台附近的已建海底管道位置。
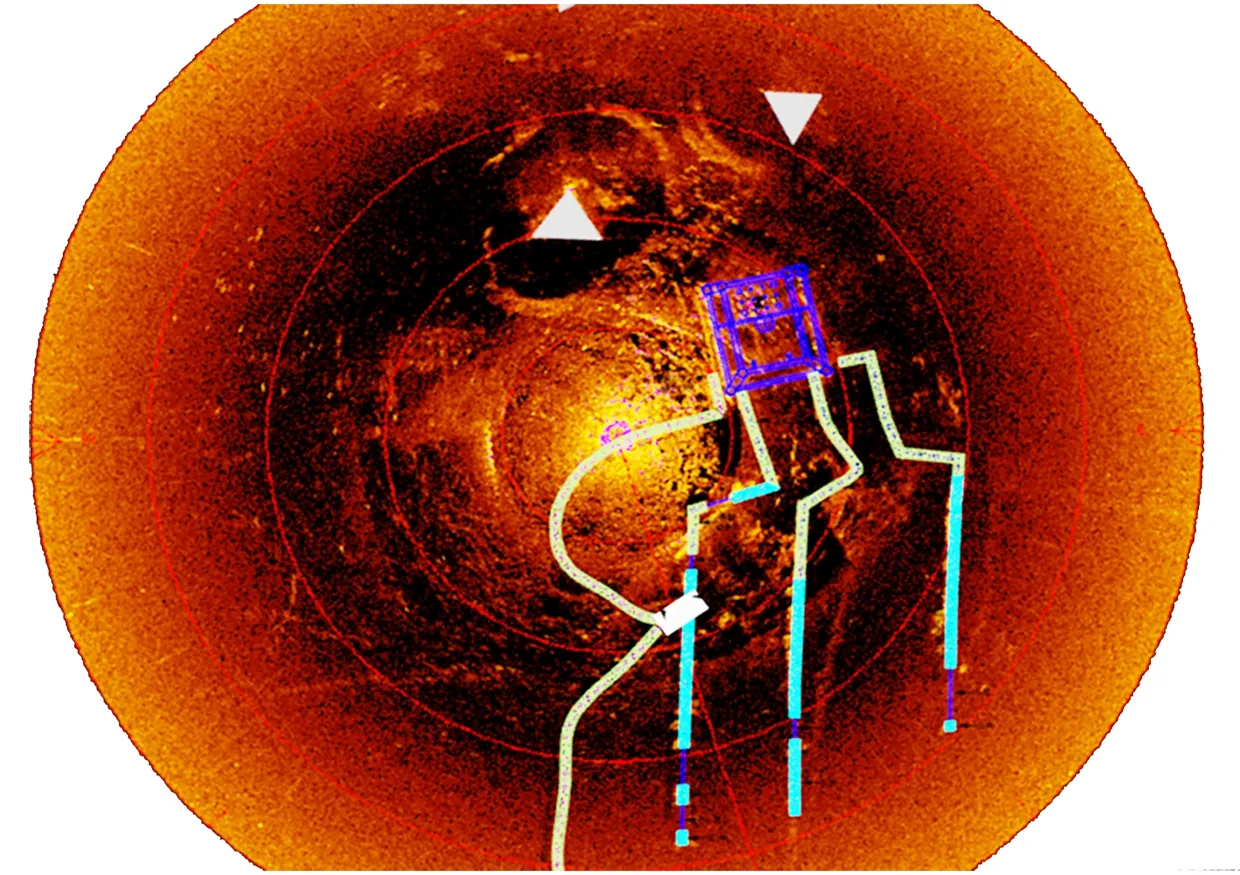
图3 扫描声纳探测平台附近海底管道结果
2.3扫描声纳调查优缺点分析
从扫描声纳的工作原理和调查案例可以看出,用扫描声纳调查平台附近的已建海底管道有较大的优势,主要表现在:(1) 在浑浊、能见度很低、光学摄像头不起作用的水中,扫描声纳也能对海底管道提供有效的探测;(2) 在海况复杂、水温较低的海域,扫描声纳也能正常进行调查作业;(3) 能有效识别平台附近海底管道的位置、裸露状态信息等。
然而扫描声纳对于埋设的管道探测能力有限,较难识别埋设的海底管道。
3ROV调查
3.1调查原理
ROV(水下机器人)是一种具有智能功能的水下潜器,可以通过配置摄像头、多功能机械手携带具有多种用途和功能的声学探测仪器以及专业工具进行各种复杂的水下作业任务。
利用ROV进行海底管线探测就是以ROV为载体,搭载多种专业调查及检测设备,以支持船舶为作业平台完成海底管线的全面检测,包括海管位置坐标、地形、异常、损坏、悬空、掩埋、交叉跨越、是否进水和泄露等海管的所有外部情况[9]。
海底管道ROV检测作业系统包括:ROV支持船、水面系统和水下ROV系统3个部分组成。水面系统包括定位导航系统、USBL(超短基线水下定位系统)控制系统、ROV控制和收放系统、数据采集和处理软硬件等;水下ROV系统包括ROV潜器及携带的各种定位及检测设备。
3.2应用实例
目前,用ROV开展海底管道检测的作业已较普遍,但用ROV进行平台附近的海底管道进行检测的案例并不多,该文将介绍在南海某平台用ROV对平台附近的已建海底管道进行探测的实例。
该海域水深60 m~70 m,ROV型号:Seaeye 915 PLUS型,动力定位(DP)船作支持,USBL水下定位系统提供ROV位置,同时ROV搭载水下摄像设备。
图4为ROV拍摄的某段海底管道的状态图,从图4中可以清晰看出管道的状态。图5为调查探测到的平台附近已建海底管缆位置。从调查结果可以看出,ROV进行管道探测结果较好。

图4 ROV拍摄海底管道现状
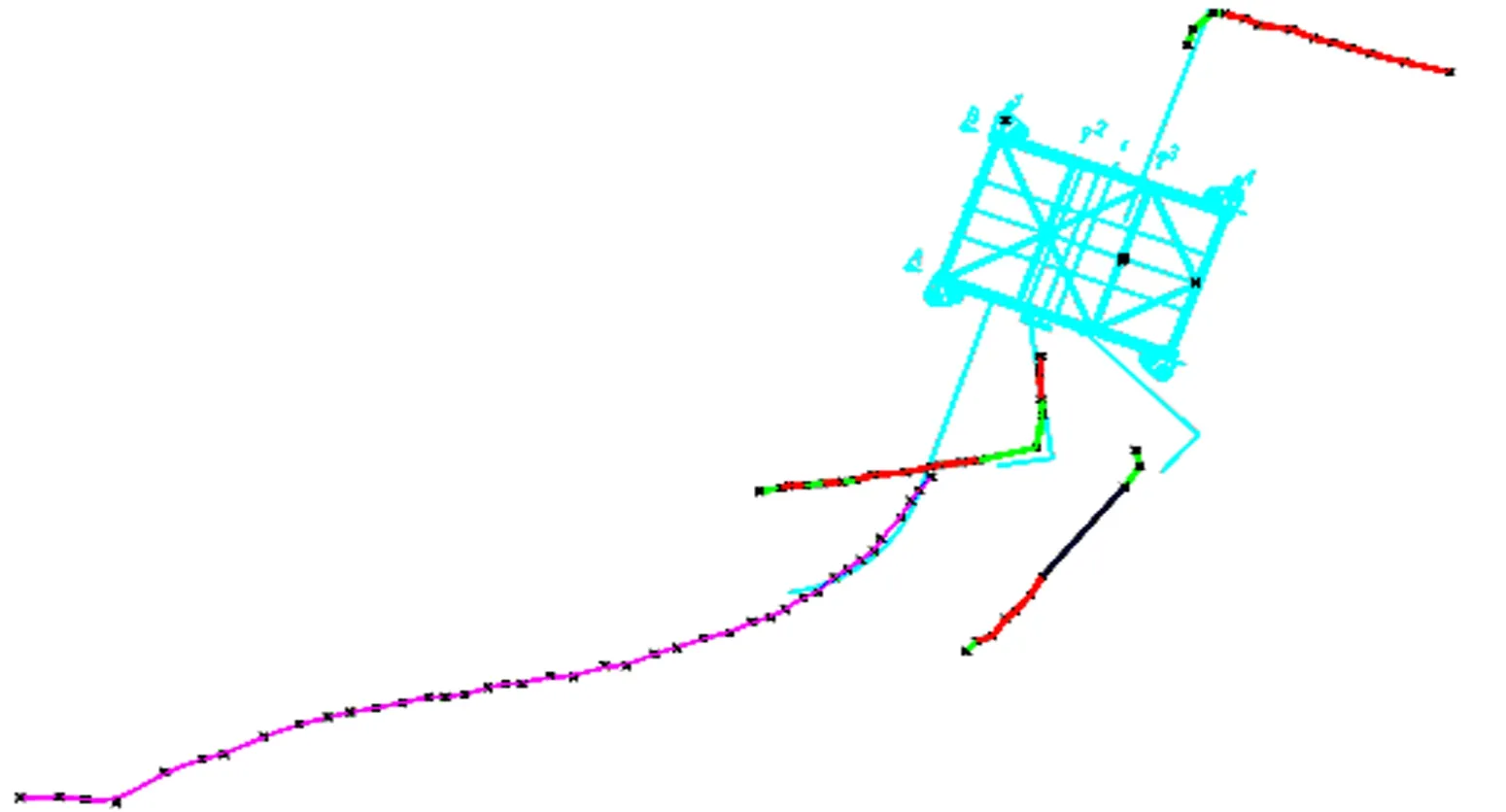
图5 ROV探测某平台附近海底管线结果
3.3ROV调查优缺点分析
用ROV开展海底管道检测已经越来越多,检测方式也已较为成熟,ROV用于平台附近海底管道探测也具有较大的优势:(1) 对海况要求不高,通常ROV可以在4~5级海况下作业;(2) 浅水、深水区均可作业,ROV作业对深水要求较小,只要求作业的支持船舶能够航行;(3) ROV作业效率较高,ROV下水后可较快地开展海底管道检测作业,运行效率较高;(4) ROV可全面检测海底管道状态,因ROV可搭载不同的设备,从而可以较全面地检测海底管道的多种状态参数。
然而ROV作业也有一定的局限性:(1) 浑浊、能见度低的海域作业效果差,由于ROV水下靠摄像头观测以指导水下作业;(2) 水深较浅区域作业效果不理想,水深较浅,不适合ROV支持船舶航行的海域,一般不用ROV作业。
4结论
经过上述分析,对于石油平台附近的海底管道探测,人工探摸、扫描声纳和ROV调查这三种调查方式各有优缺点。其中:人工探摸受水深、水的能见度、水温以及海况等影响;ROV调查受水的能见度影响较大;作业效率方面人工探摸相对较低。综合来看,扫描声纳受影响的因素最少,人工探摸调查方法制约影响最多,因此,从技术角度考虑,建议优先选用扫描声纳或者ROV调查的方式开展石油平台附近的海底管道调查。
上述三种调查方式各有优势,在复杂的海区,可以考虑上述三种调查方式联合作业,优势互补,使得调查结果更加准确可靠。
参考文献
[1]栾振东,范奉鑫,李成刚,等.地貌形态对海底管道稳定性影响的研究[J]. 海洋科学,2007,31(12):53-58.
[2]来向华,潘国富,等. 单波束测深技术在海底管道检测中应用[J]. 海洋工程,2007,25(4):66-72.
[3]来向华,马建林,等. 多波束测深技术在海底管道检测中应用[J]. 海洋工程,2006,24(3):68-73.
[4]吕邦来. 海底管线的地球物理探测技术探讨[J].水运工程,2009,34(7):146-150.
[5]荆少东,金永德. 侧扫声纳系统在管道穿越段海底地貌特征探测中的应用[J].工程地质学报,2012,20(5):827-831.
[6]何少润. 马来西亚巴贡电站导流洞下闸前门槽探测[J].水电站机电技术,2008,31(4):42-45.
[7]柴海斌,覃继,吕邦来. 海底障碍物探测技术[J].水运工程,2013,38(7):107-107.
[8]周拥军,寇新建. 基于高分辨率扇面扫描声纳影像的水下测量[J]. 工程勘察,2009,37(8):67-71.
[9]黄明泉. 水下机器人ROV在海底管线检测中的应用[J]. 海洋地质前沿,2012,28(2):52-57.
收稿日期:2016-02-25
基金项目:国家高技术研究发展计划(“863”计划)基金资助项目(2008AA09A401)。
作者简介:黄必桂(1984-),男,工程师。
文章编号:1001-4500(2016)03-0001-06
中图分类号:P75
文献标识码:A
Analysis the Detection Methods of Detecting the Marine Submerged Pipeline Beside the Offshore Oil Platform Site
HUANG Bi-gui1, LEI Fang-hui1, LI Jia-gang1, SHI Xin-gang2,WANG Jun-qin1, LI Qiang1
(1.CNOOC Research Institute, Beijing 100027, China;2. China Shipbuilding Information Center, Beijing 100101, China)
Abstract:The normal geophysical survey method is hard to detect the marine submerged pipeline beside the oil platform site. Because the survey ship is unable to sail near the oil platform site for the safety reason, and the metal of platform would affect the geophysical equipment’s signal. In this paper, three detection methods were introduced to detect the marine submerged pipeline beside the oil platform site. The three methods are manual detection, scan sonar and ROV detection. Researching the operational principle, work examples and detection results of the three methods, and discussing the advantages and disadvantages of the three methods. Finally, some advices were given in detecting the marine submerged pipeline beside the oil platform site.
Keywords:marine submerged pipeline survey; manual detection; scan sonar; ROV detection