控制量受限情况下的有限时间收敛制导律
2016-07-29 01:36:26段美君周荻哈尔滨工业大学航天学院黑龙江哈尔滨150001
兵工学报 2016年6期
段美君,周荻(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)
控制量受限情况下的有限时间收敛制导律
段美君,周荻
(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)
摘要:针对动能拦截器拦截临近空间高速机动目标的问题,基于零化视线角速率原理,应用有限时间收敛理论推导出了控制量受限情况下的Bang-Bang型滑模制导律有限时间收敛条件,既适用于二维平面情况又适用于三维空间问题。通过设计制导律中滞环控制开关门限的上下限,在视线角速率可控的条件下去除了其抖振。仿真结果表明,制导律有限时间收敛,具有较高的制导精度,并对目标机动具有鲁棒性。
关键词:控制科学与技术;滑模制导律;有限时间收敛;控制量受限;滞环控制开关
0 引言
临近空间高超声速飞行器具有飞行速度快、巡航高度高和突防能力强等特点,已经超过了现有防空武器的拦截能力。临近空间动能拦截器是一种不携带战斗部,利用高速飞行的动能直接碰撞杀伤目标的飞行器。因其体积小、质量轻,通过直接力控制实现精确制导,是对高速机动目标实施拦截的有效武器。精度高、鲁棒性强的制导律是临近空间拦截器的一项关键技术。
临近空间动能拦截器因体积小,采用捷联导引头,并把姿态控制发动机安装在弹体尾部以实现弹体坐标系跟踪视线坐标系,保证目标在视场范围内。轨道控制发动机安装在弹体纵轴,提供通过质心垂直于视线的变轨推力实现稳定跟踪,但只能以脉冲式工作,难以实现连续变推力。比例导引律[1]性能优良而得到广泛使用,但其过载指令垂直于速度方向且是连续变化的,与拦截器轨控发动机安装方式和输出推力不匹配。通过脉宽脉频(PWPF)调制[2]可实现数字变推力,但参数选择基于经验,且非线性特性带来设计和分析困难,特别是可能因为附加的控制延迟产生极限环振荡等系统不稳定现象[3-4]。基于零控脱靶量[5-6](ZEM)的制导方法,需要对目标的运动状态进行预测并实时解算出期望的速度增量,因此不适用对高速机动目标实施精确拦截的要求。考虑轨控推力的特点,滑模制导律[7]可以通过限制视线角速率实现准平行接近,并对系统摄动和外界干扰具有鲁棒性。建立在Lyapunov理论上的鲁棒制导律只保证渐进稳定或指数稳定,而对于临近空间高速机动目标,精确制导时间很有限,有限时间收敛[8]的鲁棒制导律才能达到精确末制导要求。
滑模制导律[7-9]存在抖振的问题,易导致轨控发动机频繁开机,影响其工程应用。针对抖振问题,常用饱和函数代替符号函数去除抖振,但是因为目标机动,切换增益难于取值,影响系统制导性能。对于临近空间拦截器而言,在末制导过程中,弹体动态响应过程取决于轨控发动机的动态特性,此动态特性在一定程度上带来过载跟踪制导指令的滞后。但一般来讲,拦截器所采用的轨控发动机都有很快的响应特性,例如10ms就可以上升到指令的90%,对制导精度不会产生显著影响。目标的逃逸机动是影响制导精度的一个主要因素,为了提高制导精度,非线性系统中机动目标的跟踪问题[10-12]已有大量的研究成果,一般需要假设目标的机动模型及随机机动的统计学特性,广泛采用滤波方法得到目标机动加速度的估计值[13]。
针对上述问题,本文应用滑模制导律,通过轨控发动机控制视线角速率保持在零附近,实现准平行接近。基于有限时间收敛理论给出了制导律有限时间收敛的条件,并设计了带滞环特性的控制开关,解决了抖振问题,减少了发动机的开关次数,节省了燃料,具有工程应用价值。通过仿真验证,对于高速机动目标所设计的制导方法制导精度高、鲁棒性强,并可设计开关门限减小燃料消耗。
1 末制导数学模型描述
为了研究实际三维空间内的末段制导问题,先以平面内的制导问题为基础进行说明,再做进一步推广。因此,先建立平面内的数学模型,如图1所示为平面内的导弹-目标相对运动关系,可得到相对运动方程如(1)式和(2)式所示。

图1 平面内目标-导弹相对运动关系Fig.1 Relative motion of missile and target on a plane

式中:R代表目标与导弹之间的相对距离;vt和vm分别代表目标速率和导弹速率;q代表视线角;φt和φm分别代表目标和导弹的速度方向角。
式中:at,LOS和am,LOS分别是目标加速度和导弹加速度在视线方向上的分量;at,LOS,n和am,LOS,n分别是目标加速度和导弹加速度在视线法向上的分量。在末制导问题中,am,LOS保证弹-目相对速度vm,t<0;在空间拦截等实例中,导弹迎头拦截目标,这时可以令am,LOS≡0.设计制导律的关键在于如何通过am,LOS,n控制视线角速率,令其趋近于0,从而实现准平行接近。因此,选择状态变量x=,由(4)式可得视线角速率状态方程如(9)式,作为平面内设计制导律模型,控制输入 u=am,LOS,n,目标机动干扰 w= at,LOS,n.

接下来,建立三维制导空间下的数学模型,假设导弹和目标均为质点,其相对运动方程[14]为
式中:符号与平面相对运动方程(3)式和(4)式对应;qε和qβ分别为视线倾角和视线偏角,导弹和目标加速度在视线坐标系3个轴的分量分别为和
与平面制导问题相同,am,LOS,R保证弹-目相对速度vm,t<0.设计制导律的关键在于末制导过程中如何通过am,LOS,n,ε和am,LOS,n,β使得视线角速率ε和β趋近于0,从而实现准平行接近。选择x1=ε,x2=β,由(11)式和(12)式得到具有耦合特性的三维空间下的视线角速率状态方程如(13)式,作为三维空间下设计制导律模型,控制输入 u1=

2 控制量受限的有限时间收敛制导律设计
2.1制导律设计
为了研究控制量受限情况下的有限时间收敛制导律,先给出有限时间收敛的定义和引理,作为研究制导律的理论基础。

引理 考虑非线性系统,假定存在一个定义在原点的领域 ^U⊂Rn上的C1光滑函数V(x,t),并且存在实数α>0和0<λ<1,使得V(x,t)在 ^U上正定和(x,t)+αVλ(x,t)在 ^U上半负定,则系统的原点是有限时间稳定的。收敛时间满足
由于动能杀伤拦截器(EKV)轨控发动机只能提供常值推力,忽略EKV质量变化,推力产生的加速度为常值,即平面系统模型的控制输入u=Msgn x,三维空间系统模型控制输入u1=Msgn x1和u2= -Msgn x2,其中常值M为加速度幅值。上述平面和三维空间下制导律带有常值约束,其有限时间收敛性质分别如定理1和定理2所述。
定理1 对于(9)式所示制导系统模型,在末制导过程中,若满足常值加速度M>|-2x(0)|+ ‖at,LOS,n‖,则制导律u=Msgn x可以保证视线角速率有限时间收敛,且M越大,收敛速度越快。如果导弹与目标相对接近速度可近似为常值,可保证视线角速率在制导结束前就能收敛到0.
证明:选取Lyapunov函数

则V1(x)沿系统的导数为

将控制量方程代入系统方程(9)式,代入(16)式得


实际中弹-目相对运动速度可近似为常值c,则R(t)=R(0)-ct,由(18)式得

在定理1中,得到了如(9)式所示的平面内导弹目标相对运动视线角有限时间收敛的条件,由于如(14)式所示在三维空间下,俯仰和偏航通道间存在耦合,需要进一步研究视线角速率有限时间收敛的条件,在定理1的基础上进一步给出定理2.
定理2 对于(14)式所示制导系统模型,在末制导过程中,若满足M>|-2max(x1(0),x2(0))|+ ‖at,LOS,n‖,则制导律u1=Msgn x1和u2=-Msgn x2可以保证俯仰、偏航视线角速率有限时间收敛,且M越大,收敛速度越快。如果导弹与目标相对接近速度可近似为常数,可保证俯仰、偏航视线角速率在制导结束前就能收敛到0.
构造光滑正定Lyapunov函数对(21)式求导,由定理1、cos qε<1和均值不等式有

在末制导过程中,相对距离R减小,R<R(0),

对照(23)式与(18)式可知,在三维空间下,如果导弹与目标相对接近速度可近似为常数,制导律仍能保证俯仰、偏航视线角速率在制导结束前就能收敛到0.证毕。
根据定理1和定理2中的有限时间收敛条件可知,在中、末制导交班初始时刻,EKV的轨控发动机产生的常值加速度M只要大于|-2x(0)|与目标机动加速度的界‖at,LOS,n‖二者的和,就可保证在末制导过程结束前视线角速率有限时间收敛到0.但是制导律中符号函数的存在,使得在视线角速率收敛到0后,控制量会产生抖振问题。使用滞环开关控制方法,解决抖振带来的发动机频繁开启问题。
2.2滞环开关门限设计
控制量的抖动使发动机频繁开启,不仅浪费燃料,产生的振动还会影响弹上惯性导航系统和导引头的工作,使制导性能降低。通过选择合适的关闭和开启门限,可保证视线角速率在门限区间内小范围运动。其中关闭门限避免了控制量的抖振,开启门限使视线角速率有界。因视线角速率很小并不影响制导性能,仍能实现准平行接近。以此去除抖振和减少燃料消耗。关于(9)式所示平面内制导系统模型,关闭和开启门限值的选择和滞环控制开关如定理3所示。

证明:当视线角速率为x1,发动机保持开启状态不变,视线角速率在控制作用下继续收敛,由系统方程(9)式,经过一个制导周期后的视线角速率为

当视线角速率为x3,发动机保持关闭状态不变,视线角速率在无控下继续发散,由系统方程(9)式,经过一个制导周期后的视线角速率为
当x>0时,am,LOS,n=M,关闭和开启门限分别为
当x<0时,am,LOS,n=-M ,关闭和开启门限分别为
市面上使用酒精炉的火锅店较多,主要分为液体酒精炉、固体酒精炉等几种。孕妈妈要注意的是,如果使用液体酒精炉,服务员不能在餐桌上直接进行酒精炉操作,在对酒精炉添加酒精时,服务员需先盖灭炉火,然后到独立操作间中操作。若不遵循这一操作流程,很可能有发生意外的危险。
可知只有在目标不机动即 at,LOS,n=0时,才有,门限具有对称特性;且门限大小只与距离R(t)有关,随着R(t)减小,关闭门限增大,开启门限减小。同时考虑末制导过程中弹体动态特性和目标机动逃逸,门限需要自适应调整;但实际中开关门限在极限值范围内即可去除抖振,考虑各种干扰的存在,加入边界层δ,使视线角速率在与边界层距离为时δ,即执行开关指令,无需达到极限值。对于三维空间下的制导模型(13)式,方程中的耦合项是2阶小量,对门限的影响不大,因此可以直接使用定理3中的门限开关。
3 数字仿真
以临近空间飞行器拦截来袭弹道导弹为例,末制导初始时刻,弹道导弹在发射点惯性系中的位置向量为rm=[244 589.3 m 93 277.7 m -1 574.7 m],速度向量为vm=[-4 510.2 m/s -66.7 m/s -59.3 m/s],临近空间飞行器EKV在发射点惯性系中的位置向量为rEKV=[144636.8 m 95617.9 m -546.5 m],速度向量为vEKV=[3 491.7 m/s -217.5 m/s -105.1 m/s],初始质量为 mEKV= 21.56 kg,发动机比冲Isp=200 N·s/kg.导引头数据采样周期和制导控制周期为15 ms.
由仿真初始条件,可计算出初始相对距离和相对速度为R(0)=99.985 km,(0)=-8 003.3 m/s,零控脱靶量为1 241.3 m.末制导开始时刻相对于发射点惯性系的视线仰角qε(0)=-1.34°和视线偏角qβ(0)=0.59°均为小角度,因此直接选用发射点惯性系作为末制导参考系。
3.1控制量受限对制导特性的影响
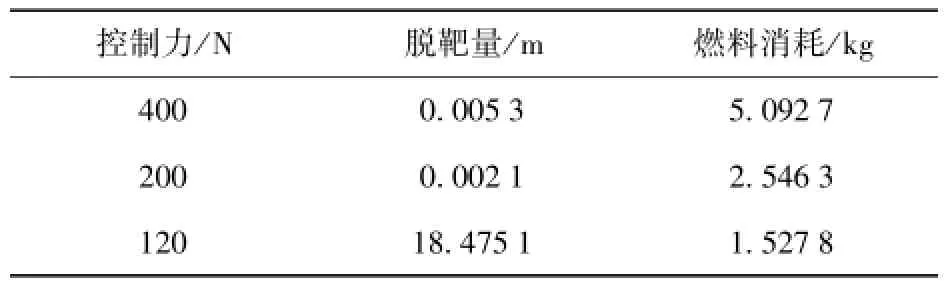
表1 制导律仿真结果Tab.1 Simulated results of guidance law
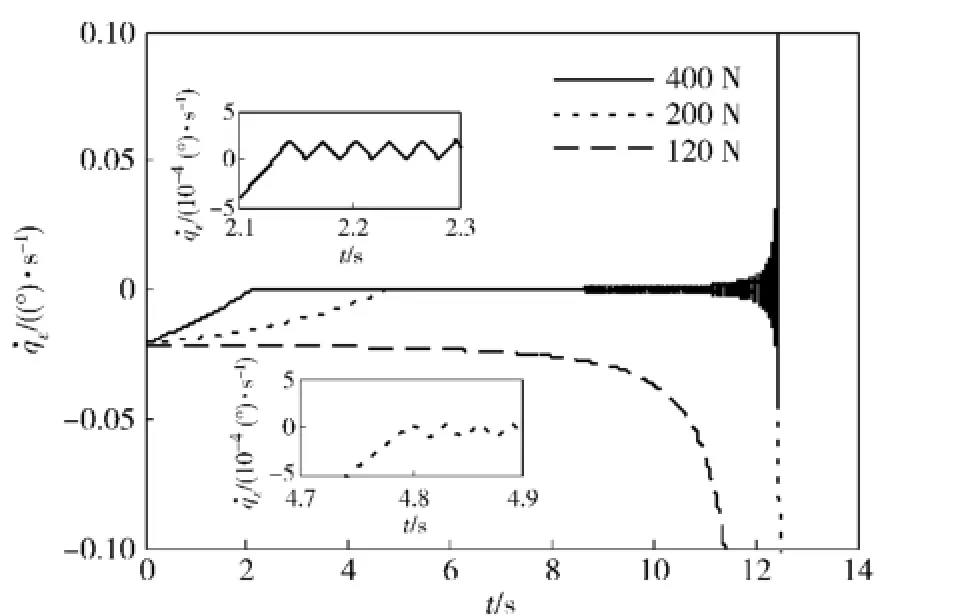
图2 视线俯仰角速率变化Fig.2 Variation of LOS pitching angular rate
由仿真结果可知,在满足定理2中的有限时间收敛条件时,脱靶量很小,视线角速率在有限时间内收敛到0,推力越大,收敛时间越小。且均在制导结束前收敛到0.同时,随着推力的增大,燃料消耗增加,视线角速率抖振加剧,脱靶量略微增大。在推力为120 N时,不满足有限时间收敛条件,视线角速率发散,导致脱靶。
3.2目标机动特性的影响

图3 纵向轨控加速度变化Fig.3 Variation of longitudinal track acceleration
目标机动使制导性能变差,但滑模制导律对干扰具有鲁棒性;同时考虑定理3中有限时间收敛条件,需要进一步验证目标机动特性对制导律有限时间收敛的影响。仿真初始条件不变,轨控发动机推力为400 N,则M=18.54,可知当at,LOS,n<12.69 m/s2时,满足有限时间收敛条件。对目标非机动、常值at,LOS,n,ε=-15 m/s2纵向机动和进行如图4所示纵向机动3种情况进行仿真,得到俯仰视线角速率如图5所示。

图4 目标纵向机动加速度Fig.4 Longitudinal maneuvering acceleration of target
从图5中可以看出:在at,LOS,n,ε=-15 m/s2时因不满足有限时间收敛条件,视线角速率发散;在目标机动时由于初始存在-5 m/s2的加速度,满足定理3中的条件仍有限时间收敛,但相对于目标非机动情况收敛时间增大。在视线角速率收敛到0后,在4~10 s加入幅值和方向不同的加速度,视线角速率保持在0附近,表明制导律对目标机动干扰具有鲁棒性;且只有在目标机动加速度与视线角速率符号一致时才会导致其快速发散;在6~8 s由于视线角速率已经收敛得很小,此时at,LOS,n,ε=-15 m/s2时仍然稳定。在10 s后机动加速度增大到-25 m/s2,不再满足有限时间收敛条件,视线角速率发散,脱靶量明显增大。

图5 视线俯仰角速率变化Fig.5 Variation of LOS pitching angular rate
3.3滞环控制开关的作用
有限时间收敛控制律中符号函数的存在导致如图3所示视线角速率发生抖振,如图3所示轨控发动机频繁开启;本节在定理2制导律中加入定理3的滞环控制开关进行仿真。仿真初始条件不变,轨控发动机推力为 400 N,目标加速度 at,LOS,n,ε= -4 m/s2和 at,LOS,n,β=-3 m/s2,发动机推力采用1阶惯性环节描述,时间常数T=2 ms,纯延时时间Td=2 ms,边界层δ=0.005,仿真结果如图6~图8所示。

图6 开关门限变化曲线Fig.6 Variation of switching threshold

图7 俯仰通道参数变化Fig.7 Variation of pitching channel parameters
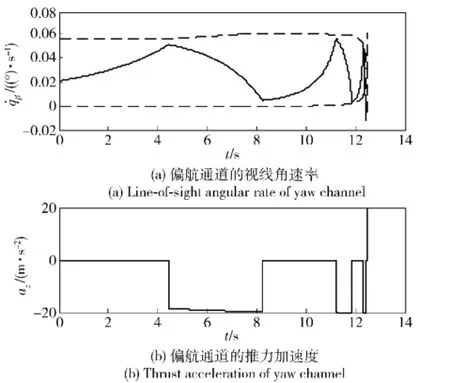
图8 偏航通道参数变化Fig.8 Variation of yaw channel parameters
图6是俯仰和偏航通道的关闭和开启门限变化曲线。此时俯仰视线角速率ε为负,只给出俯仰通道负的关闭和开启门限和δ;偏航视线角速率β为正,只给出偏航通道正的关闭和开启门限 δ和δ.由于目标机动,门限不具有对称性;随着末制导时间增加,相对距离R(t)减小,开启和关闭门限前期变化较小,最后关闭门限迅速发散,开启门限迅速收敛。
图7和图8仿真结果为俯仰和偏航通道的视线角速率和推力加速度的变化曲线。视线角速率在关闭和开启门限内变化,在轨控发动机工作后,有限时间收敛到关闭门限,即不发散,也不抖振。轨控发动机在视线角速率收敛到关闭门限后关闭,避免了抖振;在视线角速率发散到开启门限后才开启,节省燃料。仿真结果脱靶量为0.004 9 m,燃料消耗为1.799 5 kg.滞环控制开关在不影响有限时间收敛和制导精度的条件下,去除了抖振,避免了发动机频繁开启,节省了燃料。
4 结论
针对动能拦截器拦截临近空间高速机动目标,本文设计了控制量受限的有限时间收敛制导律,给出了收敛条件,并采用滞环控制开关去除了系统抖振,提高了制导性能。基于有限时间理论能够保证视线角速率在制导结束前的有限时间内收敛到期望值,且滑模控制对目标机动干扰具有鲁棒性,视线角速率始终保持在较小范围内变化,实现准平行接近,具有较高的制导精度。采用滞环控制开关去除系统抖振,克服了饱和函数法参数经验取值问题,关闭和开启门限保证视线角速率在其范围内有界变化,去除了抖振。此外,滞环控制开关解决了发动机频繁开关问题,最大限度减少了燃料消耗,门限参数易于选取,制导律结构简单,便于工程应用。
参考文献(References)
[1] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2006. QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Flight dynamics of missiles[M].Beijing:Beijing Institute of Technology Press,2006.(in Chinese)
[2] Krovel T D.Optimal tuning of PWPF modulator for attitude control [D].Norway:Norway University of Science and Technology,2005.
[3] 陆艳辉,张曙光.离散RCS的PWPF调制方式改进及混合控制逻辑设计[J].航空学报,2012,33(9):1561-1570. LU Yan-hui,ZHANG Shu-guang.An improvement on PWPF modulation of discrete RCS and design of the blended control logic [J].Acta Aeronautica et Astronautica Sinica,2012,33(9):1561-1570.(in Chinese)
[4] 王清,杨宝庆,马克茂.一种优化PWPF调节器在动能拦截器末制导中的应用研究[J].宇航学报,2005,26(5):576-580. WANG Qing,YANG Bao-qing,MA Ke-mao.PWPF optimizing design and its application research to terminal guidance of kenetic killing vehicle[J].Journal of Astronautics,2005,26(5):576-580.(in Chinese)
[5] 李运迁,齐乃明.基于零控脱靶量的大气层内拦截弹制导律[J].宇航学报,2010,31(7):1768-1775. LI Yun-qian,QI Nai-ming.A zero-effort miss distance-based guidance law for endoatmoshperic interceptor[J].Journal of Astronautics,2010,31(7):1768-1775.(in Chinese)
[6] 陈峰,肖业伦,陈万春.基于零控脱靶量的大气层外超远程拦截制导[J].航空学报,2009,30(9):1583-1589. CHEN Feng,XIAO Ye-lun,CHEN Wan-chun.Guidance based on zero effort miss for super-range exoatmospheric intercept[J].Acta Aeronautica et Astronautica Sinica,2009,30(9):1583-1589. (in Chinese)
[7] Zhou D,Mu C D,Xu W L.Adaptive sliding-mode guidance of a homing missile[J].Journal of Guidance,Control,and Dynamics,1999,22(4):589-594.
[8] 孙胜,周荻.有限时间收敛变结构导引律[J].宇航学报,2008,29(4):1258-1262. SUN Sheng,ZHOU Di.A finite time convergent variable structure guidance law[J].Journal of Astronautics,2008,29(4):1258-1262.(in Chinese)
[9] 商巍,唐胜景,郭杰,等.考虑自动驾驶仪特性的自适应模糊动态面滑模制导律设计[J].兵工学报,2015,36(4):660-667. SHANG Wei,TANG Sheng-jing,GUO Jie,et al.Design of adaptive fuzzy dynamic surface sliding-mode guidance law considering autopilot lag[J].Acta Armamentarii,2015,36(4):660-667. (in Chinese)
[10] 马克茂,贺风华,姚郁.目标机动加速度的估计与导引律的实现[J].宇航学报,2009,30(6):2213-2219. MA Ke-mao,HE Feng-hua,YAO Yu.Estimation of target maneuver acceleration and guidance law implementation in homing terminal guidance[J].Journal of Astronautics,2009,30(6):2213-2219.(in Chinese)
[11] 王宏强,黎湘,刘丹,等.非线性系统中的机动目标跟踪算法[J].国防科技大学学报,2002,24(2):57-60. WANG Hong-qiang,LI Xiang,LIU Dan,et al.Maneuvering target tracking in the nonlinear system[J].Journal of National University of Defense Technology,2002,24(2):57-60.(in Chinese)
[12] 周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991. ZHOU Hong-ren,JING Zhong-liang,WANG Pei-de.Tracking of maneuvering target[M].Beijing:National Defense Industry Press,1991.(in Chinese)
[13] 周宏仁.机动目标当前统计模型与自适应跟踪算法[J].航空学报,1993,4(1):73-86. ZHOU Hong-ren.A current statistical model and adaptive tracking algorithm for maneuvering targets[J].Journal of Astronautics,1993,4(1):73-86.(in Chinese)
[14] 孙胜,周荻.考虑导弹自动驾驶仪动特性的三维非线性导引律[J].宇航学报,2009,30(3):1052-1056. SUN Sheng,ZHOU Di.Three-dimensional nonlinear guidance law with consideration of autopilot dynamics[J].Journal of Astronautics,2009,30(3):1052-1056.(in Chinese)
中图分类号:TJ765
文献标志码:A
文章编号:1000-1093(2016)06-1030-08
DOI:10.3969/j.issn.1000-1093.2016.06.009
收稿日期:2015-12-11
基金项目:国家自然科学基金项目(61174203)
作者简介:段美君(1987—),男,博士研究生。E-mail:richie_dmj@126.com;周荻(1969—),男,教授,博士生导师。E-mail:zhoud@hit.edu.cn
A Guidance Law with Finite Time under Control Variable Constraint
DUAN Mei-jun,ZHOU Di
(School of Astronautics,Harbin Institute of Technology,Harbin 150001,Heilongjiang,China)
Abstract:Based on control theory with finite time convergence,the finite time convergence condition of Bang-Bang sliding-mode guidance law and a hysteresis control switch are proposed for the problem of that a kinetic kill vehicle intercepts a supersonic maneuvering target in near space.The condition of finite time convergence of the sliding-mode guidance law against maneuvering target under control variable constraint is presented based on the principle of nullifying the line-of-sight angular rate.Both planar guidance law and three-dimensional guidance law are designed.The upper and lower thresholds of hysteresis control switch are obtained to eliminate the chattering of line-of-sight angular rate.Simulation results show that the proposed guidance law ensures the finite time convergence of line-of-sight angular rate,and has higher guidance accuracy and robustness to high speed maneuvering target.The hysteresis control switch can remove the chattering of line-of-sight angular rate effectively.
Key words:control science and technology;sliding-mode guidance law;finite time convergence;control variable constraint;hysteresis control switch