
手持GPS在土地测量中的稳定性分析研究
2016-07-25 10:27:35崔丽红
山西农经 2016年9期
□崔丽红
(运城市国土资源局山西运城044000)
手持GPS在土地测量中的稳定性分析研究
□崔丽红
(运城市国土资源局山西运城044000)
手持GPS具有不受时间限制、操作简单、小巧轻便等优点,被广泛地应用到了国土测量的工作中,在勘察地界、物化探测网布设、工程验收等方面简化了工作程序、节省了人力物力、加快了工作进度、提高了工作效率。手持GPS设备的稳定性,是其测量精准度的基础,同时也是测量成果真实有效的可靠保障。本文设计采取4种不同的定位方法,从手持GPS的信号接收时间、信号接收的顺序以及定位各点之间的位置关系等角度,以实验的方式对其稳定性进行分析,找出最佳的定位方法。
手持GPS;土地测量;稳定性
土地测量是国土资源管理的一项十分重要的内容,在土地资源调查和国土监测、建设用地勘验、土地开发项目验收、土地利用评价等方面都起到了十分重要的作用。GPS(globalpositioningsystem)“全球定位系统”的英文缩写,是由美国研发的一套卫星导航定位系统,如今越来越多地应用到各个领域。
手持GPS,即移动GPS,是将GPS智能手持机作为终端,基于移动互联网所建立的地理信息系统。手持GPS的使用不受时间限制、操作简单、比起RTK小巧轻便、价格便宜等,这些优点使得它广泛地应用到了国土测量的工作中,在勘察地界、物化探测网布设、工程验收等方面简化了工作程序、节省了人力物力、加快了工作进度、提高了工作效率。
手持GPS设备的稳定性,是其测量精准度的基础,同时也是测量成果真实有效的可靠保障。所谓设备的稳定性,就是指仪器能够在不同的地点、不同的时段里,所测得的数据符合规律,其误差能控制在允许的范围内。这样,内业工作对数据的判读、分析、应用才能真是可靠。但是,目前由于定位时间的长短、GPS基站的信号传输强度、测量天气状况的好坏、地表植被和建筑物的遮挡、和操作不当等因素,手持GPS定点往往会出现较大误差。误差过大,超过了允许的范围,不仅不符合相关操作规程的要求,还会导致测量结果的可靠性降低,影响正确的土地测量工作。因此,对手持GPS设备进行稳定性测试是十分必要的。本文设计采取4种不同的定位方法,从手持GPS的信号接收时间、信号接收的顺序以及定位各点之间的位置关系等角度,以实验的方式,找出最佳的定位方法。
1 手持GPS类型介绍
手持GPS分为高精度和低精度两大类。设备的标准配置包括接收天线、定位解算主板、电源系统、微型电脑、应用软件、其他设备等。
1.1 高精度手持GPS
高精度手持GPS的由于采用的是专业卫星定位模块,在获取高精度的地理位置信息更加的便捷,其精度可以达到20~100cm[1]。此外,它支持多种工具软件的使用,兼容CORS、RTK、SBAS,以及二次开发的采集录入软件等。高精度手持GPS一般应用于专业的测绘工作、地理信息调查和地籍信息的采集工作中。但是,因为其价格较高,在普通的测绘工作中不常用到。
1.2 低精度手持GPS
低精度手持GPS采用了“单点定位原理”,所以精度较低[2]。其定位精度受卫星轨道误差、钟差及信号传播误差等因素影响,尽管其中的一些系统误差可以通过模型加以消除,但残差仍不可忽视[3]。低精度手持GPS价格较低,其应用较为广泛,目前市场上有各种不同品牌的普通设备。
2 稳定性实验
2.1 实验地块概况
实验地块位于运城市,该地块Z位于规划土地综合整治工程项目区内,形状为不规则多边形,A,B,C,D,E,F分别为其五个顶点(如图1)。目前,Z的地籍资料完整并已入库。根据解析法计算地块Z的面积为749.6966m2。

图1 实验地块Z示意图
2.2 方法设计
本次实验采用佳明GPSMAP-62sc型手持GPS,设计采用4种方法:(1)短时间静态定位,逐个对地块顶点进行定位,每点静态测量时间为1分钟;(2)长时间静态定位,逐个对地块顶点进行定位,每点静态测量时间为20分钟;(3)动态测量,沿顺时针方向,依次对A-B-C-D-E-F定位;(4)动态测量,沿逆时针方向,依次对F-E-D-C-B-A定位。
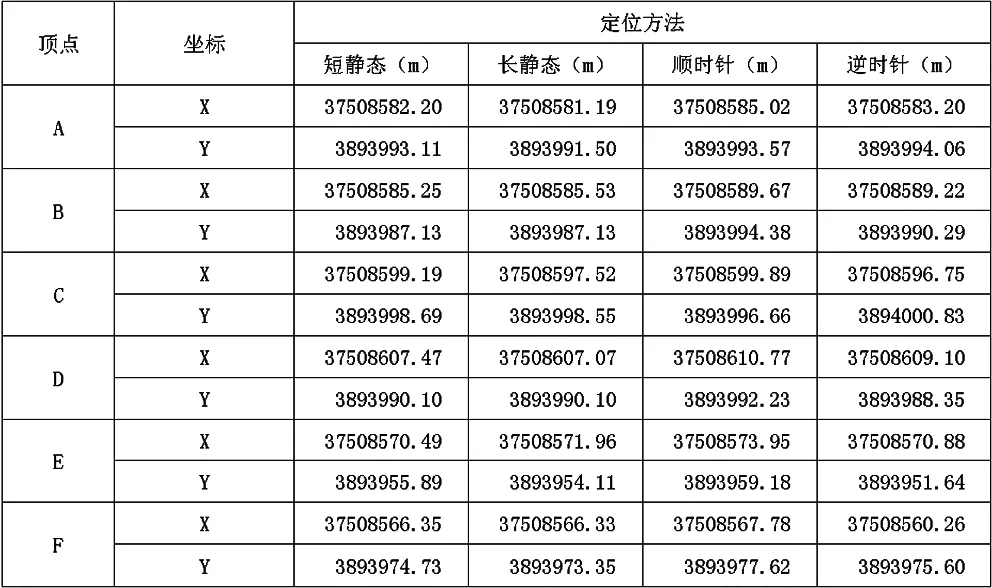
表1 地块Z各顶点坐标测量数据
2.3 手持GPS定位操作
2.3.1 坐标系参数设置。由于GPS导航系统是根据WGS84经纬度坐标系建立的,而我国国土管理和测绘普遍使用的是西安80坐标系(或者北京54坐标系)。因此,要对手持GPS设备的坐标系进行参数设置。从现有坐标系转换为另一坐标系的过程中,两者之间会发生平移和旋转[4]。表现在实际操作过程中,同一点的坐标,用不同的坐标系测量,出现的误差范围是80~120米。
(1)坐标格式的设定步骤:开机进入主界面——选择“设置”菜单——选择“坐标”子菜单——点击“坐标格式”,选择出现的输入框中——打开坐标格式列表——选择“UserUTMGrid”(公里网坐标显示格式),并确认——将相关参数(中央经线6度带本区域使用113;投影比例为1;东西偏差值为500000;南北偏差值为0)输入至“自定义坐标格式”页面中——储存设置。
(2)坐标系系统设定步骤:回到主界面——选择“设置”菜单——选择“坐标”子菜单——点击“坐标系统”,出现输入框——点击坐标系统列表——选择“用户”,出现“自定义坐标系统”页面——输入相关的参数(以西安80坐标系为例,DA=-3,DF=0)——存储设置数据。
坐标系系统设定只针对低精度手持GPS设备。
2.3.2 外业操作
(1)目标地的确定。根据地形图或地籍资料,查找出目标地的坐标,将值输入手持GPS设备中。
(2)导航起始点的确定。在空旷地信号接收较强的地方,确定导航起始点。
(3)导航过程中,要注意手持GPS“位置”画面中的估计误差。低精度手持GPS估计误差小于15m时,说明当前位置准确[5];如果估计误该值,则应保持静态,对设备GPS作差分运算。
(4)目标点的确定。低精度手持GPS在“位置”界面显示的估计误差小于规定范围(山区小于15m;平原小于10m),该界面的坐标值与目标点预设坐标值相等,即可确定当前位置为目标点[6]。此外,还可以运用地表现状判读的方法辅助确定。
2.4 结果分析
运用4种定位方法,分别测得A,B,C,D,E,F的坐标,详见表1。
地块Z的4种定位方法,最大误差为逆时针定位法:219.6170m2;最小误差为长静态定位法:2.1394m2。
逐点静态定位测量与顺时针或逆时针动态测量相比较,面积误差不在同一数量级,前者的误差明显小于后者。
短静态定位(1min)与长静态定位(20min)比较可得,在定位时间长的情况下,误差会明显减小。
在动态定位测量时,误差的产生和范围与运动路线无关,面积误差均较大。
在测量地块时,面积越小,测量所需的精度越高时,误差往往越大。

表2 地块Z各边边长计算表

表3 地块Z面积和误差计算表
3 结论
由此可以得出:(1)手持GPS的精度受信号接收时间的影响较大,测量时需等待信号接收稳定时,再进行测量;(2)手持GPS在移动时,由于接收信号不稳定等因素的影响,误差会增大。(3)手持GPS适用于较大田块的测量,对面积较小,测量精度要求高的地块,它的使用存在一定的局限性。
结束语
手持GPS设备具有轻巧便于携带,操作简单直观等特点;在测量过程中,由于多种因素的影响,会出现偶然误差较大情况,有时甚至还会出现粗差,影响测量工作的质量。对此,我们要认真分析原因,在保持手持GPS设备对信号接收稳定的同时,减少人为操作不当所带来的测量误差,确保设备高效运用。
[1]黎曦,汤丽琼.手持低精度及高精度GPS接收机在林业调查中的应用研究[J].安徽农业科学,2012(23).
[2]冯晓娜,徐文兵,汤孟平,吴广正.集思宝G330手持全球定位系统接收机在林区单点定位的精度分析[J].浙江农林大学学报,2013(5).
[3]程政,班亚龙,张提升,牛小骥.竹林环境中GPS信号质量及其定位性能分析[J].地理与地理信息科学,2015 (5).
[4]张光华.全球导航卫星系统[D].哈尔滨:哈尔滨工业大学,2013.
[5],[6]黎曦,汤丽琼.手持低精度及高精度GPS接收机在林业调查中的应用研究[J].安徽农业科学,2012(23).
1004-7026(2016)09-0133-03
P228.4
A
10.16675/j.cnki.cn14-1065/f.2016.09.090
崔丽红(1981—),女,就职于运城市国土资源局,助理,主要从事土地测绘业务工作。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
中等数学(2017年2期)2017-06-01 12:21:50
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
机电信息(2015年9期)2015-02-27 15:55:56
电子设计工程(2015年15期)2015-02-27 12:07:33
