
现实场景深度采集系统设计
2016-07-22 10:50吴一超中国电子科技集团公司光电研究院天津300000
电子测试 2016年11期
吴一超,王 储(中国电子科技集团公司光电研究院,天津,300000)
现实场景深度采集系统设计
吴一超,王 储
(中国电子科技集团公司光电研究院,天津,300000)
摘要:近年来现实场景深度在各种场景下都得到了广泛的应用:在家庭中有家用智能清扫机器人、家庭服务机器人;在工厂中有应用于物流的自动导引运输车(WMR);在野外考察中有探测机器人;在战场上中有侦察、排雷机器人。这些应用的场景大多非常复杂,因此建立准确的场景模型对于未知环境中的工作非常重要。
关键词:现实场景;深度信息;场景重建
0 引言
现实场景深度采集系统的主要目的就是为了通过移动机器人在未知现实场景中的采集获得场景漫游的过程中采集场景中各个位置的深度信息,并根据不同位置的深度信息构建现实场景的三维模型,以完成未知环境的探测并为在未知现实场景中导航打下基础。
1 机理模型
1.1场景深度扫描系统构成
场景深度扫描子系统由一对背向的激光扫描仪组成。它能够采集两侧的立面上的深度信息。
激光扫描仪是利用激光对目标的距离进行准确测定的仪器。它测距的基本原理是通过计算激光到待测目标的往返传输时间(time-of-flight)来测定到目标点的距离。测距所依据的公式为:(1),其中,为光在空气中的传播速度,为光信号往返所经过的时间,为待测目标的距离。
1.2深度场景扫描系统机理模型
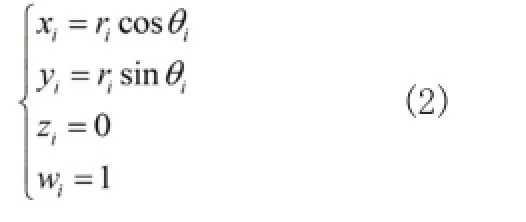
在每次测量中,激光扫描仪一般通过扫描面上不同角度的障碍物的外轮廓打出一系列激光点,并将这一系列激光点按照扫描顺序输出以激光扫描仪的中心为原点O,正下方为轴正方向,正左方为y轴正方向,正前方为z轴建立直角坐标系,我们称这个坐标系为激光扫描仪坐标系。场景深度切片中的每个激光点以zOy平面上极坐标的形式表达是很容易的。不妨设场景深度切片中的某点的极坐标为,齐次坐标为。依公式(2.2)可将极坐标转化为齐次坐标。
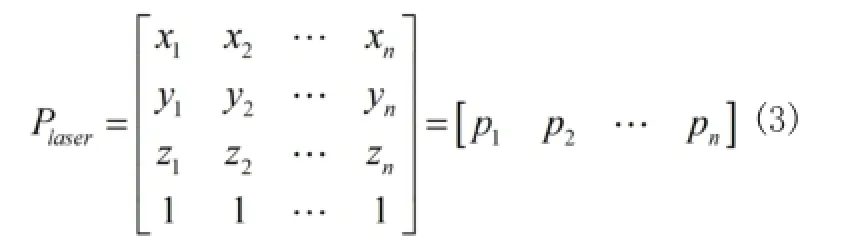
这样,我们就可以定义场景深度切片矩阵为:
1.3深度场景重建机理模型
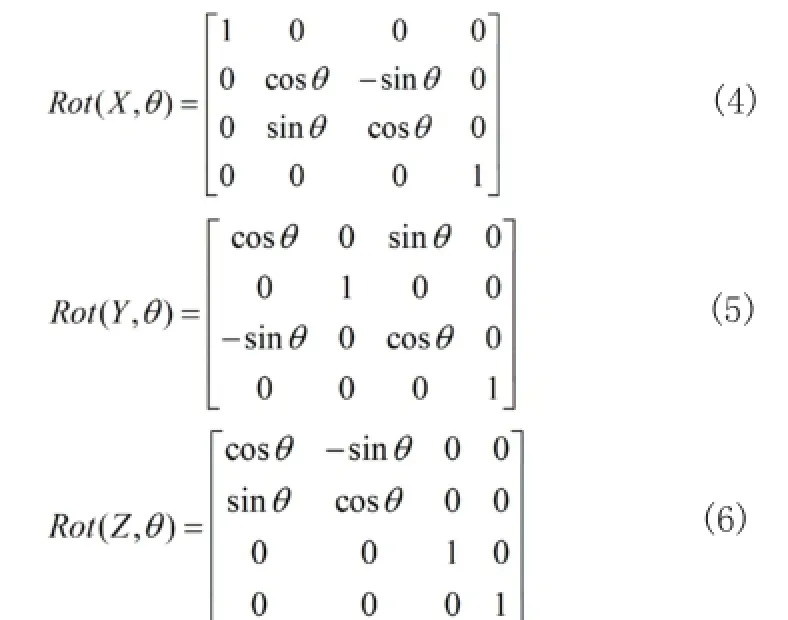
为了推倒场景深度扫描系统下的场景深度切片矩阵我们需要讨论一下激光扫描仪坐标系与采集系统坐标系的位置关系。设沿着x轴、y轴、z轴的旋转角度的齐次变换矩阵分别为:
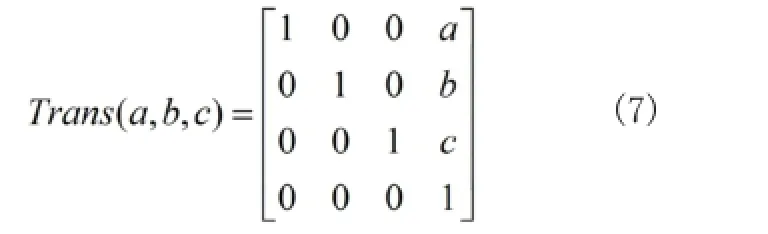
设沿着向量平移的齐次变换矩阵为:
2 场景深度扫描系统的实现
场景深度扫描子系统由一对背向的激光扫描仪组成,在现实场景建模采集系统中的激光测距设备采用的是采用德国SICK公司的LMS200激光扫描仪。
得到深度扫描切片后,通过3.3节介绍的深度场景重建机理模型,我们可以得到这几组场景切片间的位置关系,进而可以将其绘制在空间中。通过场景深度扫描子系统的扫瞄实验我们可以看到,场景深度扫描子系统的扫描结果能够真实地反映现实场景,这为下面的现实场景建模打下了良好的基础。
3 结论
近年来,随着场景重建技术的发展,在未知现实场景的场景重建技术得到越来越广泛的应用,建立未知现实场景的准确模型的需求也越来越强烈。本文针对这种需求设计了一种现实场景的深度采集系统,并介绍了景深度采集系统的系统构成、深度场景扫描及重建的机理模型,最后通过场景扫描及重建试验验证了该设计方案的可行性。
参考文献
[1]周盛荣.智能家庭清扫机器人的研究[D], 哈尔滨工业大学,2006: 1-2.
[2]莫海军, 吴少炜.排爆机器人及相关技术[J],机器人技术与应用, 2005, 5(4): 52-54.
[3]刘睿,王锋,张法全.基于序列图像的粮堆三维重建技术研究[J],河南工业大学学报(自然科学版),2009, 30(3):43-44.
[4]黄明登.基于激光雷达的移动机器人室内环境探测技术研究[D], 湖南中南大学, 2007: 10-14.
Design of real scene depth acquisition system
Wu Yichao,Wang Chu
(Institute of optoelectronics, China Electronic Technology Group Corporation,Tianjin,300000)
Abstract:In recent years,the depth of real scenes in a variety of scenarios have been widely used,in the family has intelligent domestic cleaning robot,home service robot;in the factory has application in the logistics of the automated guided vehicles(WMR);in the study in the field of detection robot;in the battlefield in a reconnaissance,demining robot.Most of these applications are very complex,so it is very important to establish an accurate model of the scene for the unknown environment.
Keywords:realistic scene;depth information;scene reconstruction
作者简介
吴一超(1985-), 男, 辽宁人,毕业于东北大学,研究方向为系统硬件设计;
王储(1987-), 女, 黑龙江人,毕业于山东科技大学,研究方向为系统仿真.
