
基于视觉引导的陶瓷瓶口定位机器人设计
2016-07-22 10:50唐燕妮河源职业技术学院广东河源517000
电子测试 2016年11期
唐燕妮(河源职业技术学院,广东河源,517000)
基于视觉引导的陶瓷瓶口定位机器人设计
唐燕妮
(河源职业技术学院,广东河源,517000)
摘要:为了将视觉系统送入器皿瓷内部采集内表面图像,设计了一种门式三自由度直角坐标的陶瓷瓶口定位机器人。介绍了机器人的功能体系和硬件构成,研究了基于视觉原理引导机器人定位运动的实现方法:由CMOS相机拍摄瓶口图像,经过处理后拟合出瓶口外环圆,求取圆心坐标。以该坐标为目标位置,引导机器人XY轴作水平运动,将Z轴定位到瓶口中心。实验结果表明,机器人能快速、准确地获取瓶口图像和定位瓶口中心,为机器视觉应用在器皿瓷内表面的缺陷检测奠定了研究基础。
关键词:视觉引导;陶瓷瓶口;内表面;机器人定位
0 引言
陈设艺术青瓷器、薄胎瓷器、铜红釉瓷器、青花瓷器、粉彩瓷器等包括多种器皿瓷产品,如瓶、缸、花钵、箭筒、坛、罐等等。器皿瓷外形不规则,其特点是上部的口或颈尺寸小、中下部的肩或肚尺寸大(如图1所示),导致产品的非显见面人工目视难于抵达,对内部的裂纹、缺釉、釉泡、熔洞、落渣缺陷不能很好的检验。随着机器视觉技术在陶瓷检测领域的逐步应用和日趋成熟,有效的解决办法之一是将视觉系统送入器皿瓷内部采集图像,由计算机进行图像处理和缺陷识别,完成内表面外观质量的判别。
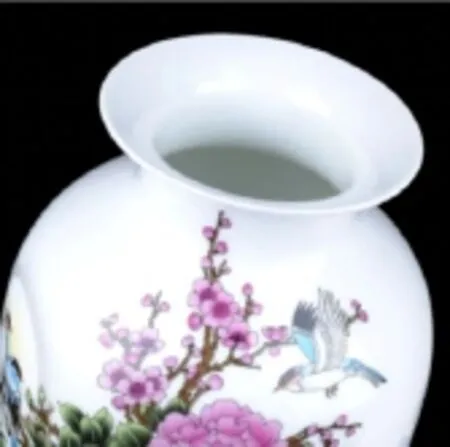
图1 一种器皿瓷产品外形Fig.1 A kind of ceramic ware’s outline drawing
为了引导视觉系统进入器皿瓷内部工作,本文以粉彩瓷花瓶为研究对象,设计了一种应用于陶瓷瓶口定位的三自由度门式直角坐标机器人。工作时,视觉系统采集瓶口图像并求取瓶口中心坐标,引导机器人运动定位至瓶口中心位置,并可做垂直运动将相机送入瓶内拍照,从而提高系统对器皿瓷产品内部进行图像采集的自主判断能力,提升器皿瓷外观质量检验的工作效率。
1 陶瓷瓶口定位机器人的总体结构设计
1.1总体结构
依据机器人的工作任务和陶瓷瓶外形特点,设计的三自由度门式直角坐标机器人整体结构如图2所示,它由一组门式XYZ三轴机械臂滑台、支架、COMS相机模块和PLC伺服运动系统构成。
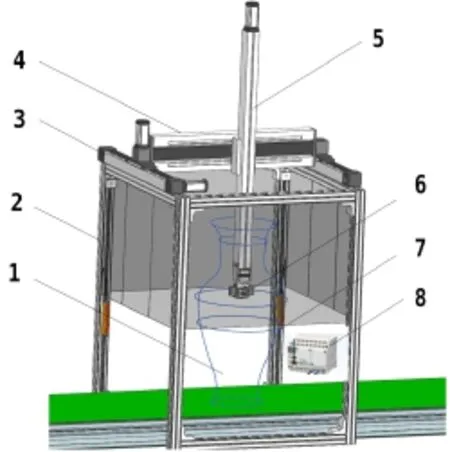
图2 机器人总体结构Fig.2 The robot’s overall structure
门式XYZ三轴机械臂滑台是机器人的主体机构,组成包括水平移动单元X轴和Y轴,以及垂直移动单元Z轴,可实现XYZ三个自由度的直线运行。水平方向上,由两个伺服电机经各自同步带驱动X轴和Y轴在支架上做直线运动,由机械零点坐标运动至目标坐标。其中,机械零点设置在四边形支架中心点,目标坐标即瓶口中心位置信息由视觉引导程序提供。竖直方向上,由一个伺服电机经滚珠丝杆带动Z轴及其末端的相机模块做垂直直线运动,将相机模块送入瓶内。机器人选择同步带传动方式与滚珠丝杠传动方式相结合,同步带具有传动平稳、结构紧凑、可靠性能好的特点,可保证瓶口中心定位运动的稳定可靠;滚珠丝杠具有精度高、摩擦阻力小、定位精度高的特点,可满足相机对不同高度的陶瓷瓶内拍摄图像的精准位置要求。
支架尺寸80×60×100cm,采用框架组合结构,选用铝合金型材和高强度螺栓连接,整体结构简单而坚固,为机械臂运动提供了稳定可靠的工作平台。运行时,陶瓷瓶放置在支架下发中心区域。
1.2视觉系统
陶瓷瓶口图像的采集要求瓶口图像能快速、有效的被获取并送往计算机处理,对视觉系统的硬件要求不高。综合考虑视觉系统的其它要求,如进入外形不规则的陶瓷瓶内采集多帧图像,需要满足瓶内工作空间小、机器人负载轻、相机能自动变焦等应用要求,选用了基于索尼IMX179方案设计的COMS相机模组。该相机具有自动对焦功能和800万有效像素,采用USB2.0与计算机通信,配合M12规格的高拍仪镜头使用,拥有工业级的拍摄速度和图像质量,充分满足了视觉系统选型微型化、智能化的要求。相机模组带有两排LED灯组成的线形光源,尺寸为32×32×23mm,通过固定机构安装在Z轴机械臂的下端。
1.3PLC伺服运动系统
根据机器人的功能要求,设计的电气控制系统主要包括PLC单元、伺服驱动器、伺服电机、传感器、手动按键和蜂鸣器电路等,硬件结构如图3所示。PLC及扩展模块接收和处理传感器采集的开关信号,通过串口与计算机软件实时通讯,接收软件传输出的机器人运动坐标信号,转换为脉冲序列和正反转方向信号给伺服驱动器。驱动器输出电压信号控制伺服电机运转,并接收电机反馈信号,实现机器人位置运动的精准控制。为保证系统的可靠性,电气控制选用三菱FX2N36MR继电器型PLC作为中央控制处理器,驱动器选用交流伺服驱动器GS0020A,电机选用微型交流伺服电机60CB020C。
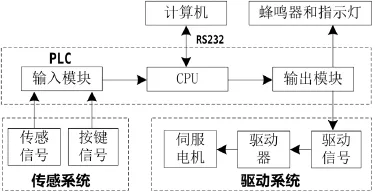
图3 PLC伺服运动系统结构图Fig.3 The structure chart of PLC servo motor system
2 陶瓷瓶口定位机器人的软件开发
2.1视觉处理与引导
2.1.1获取瓶口图像
当陶瓷瓶处于支架下方中心区域时,系统点亮光源并触发相机向下拍摄一帧瓶口图像。以瓶口图像的垂直平分线为分界线,分左右两侧对非零像素数量进行累加统计,比较和值的大小,可分析出三种典型的位置状态:两侧和值接近,说明瓶口处于中间位置;左侧和值高,说明瓶口位置偏左,其瓶口外环的边缘接近图像左边界;右侧和值高,说明瓶口位置偏右,其瓶口外环的边缘接近图像右边界。不同位置的瓶口图像如图4所示。
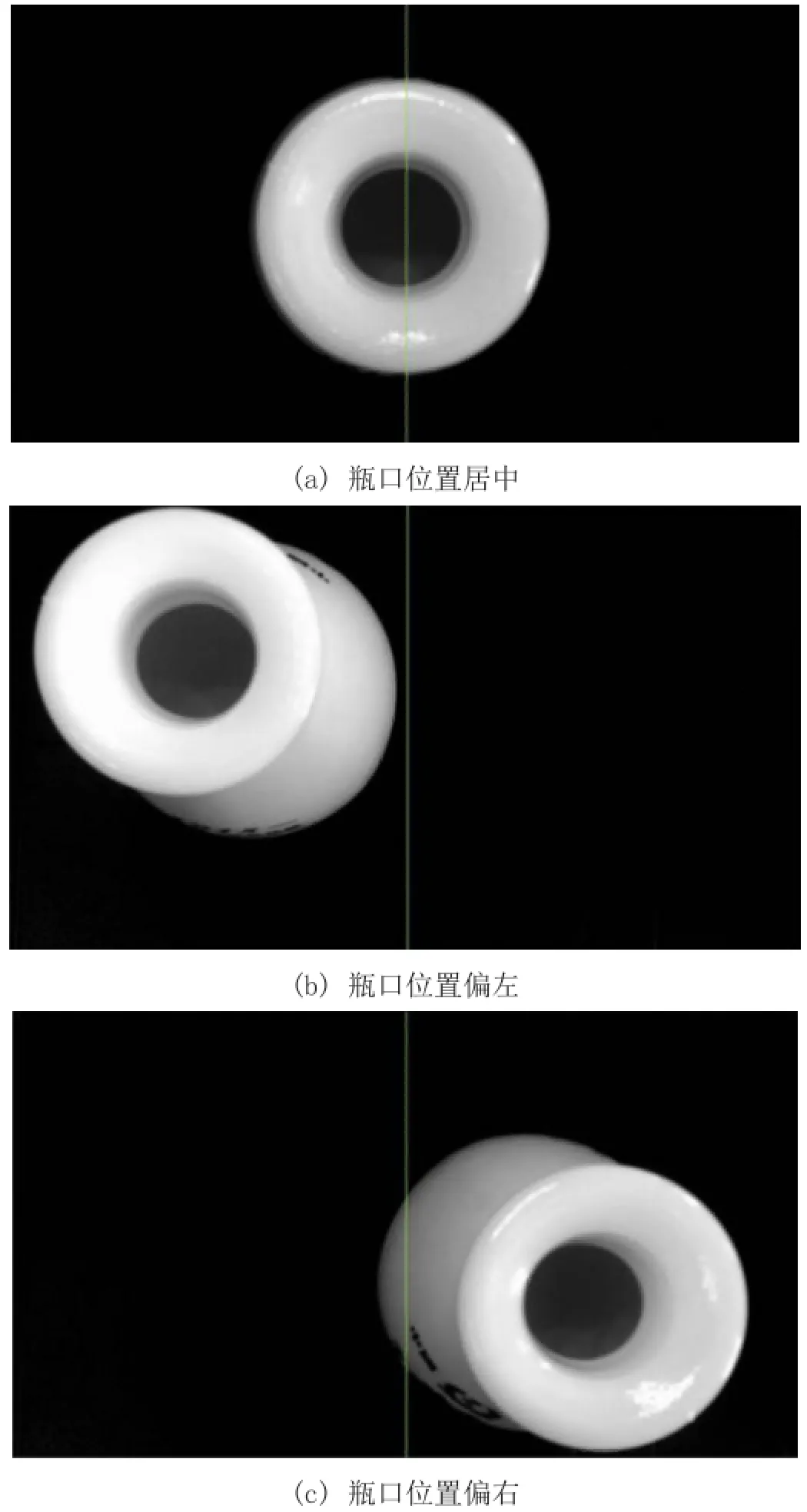
图4 不同位置的瓶口图像Fig.4 The vase-mouth image in different positions (a)center; (b)left; (c)right
2.1.2瓶口图像的处理
陶瓷瓶生产现场的粉尘、光照以及机器人机械振动等环境影响,使得相机拍摄到的瓶口图像带有噪声,需先对图像进行预处理,滤除噪声干扰和突出图像特征,方便图像的后续处理。软件首先对瓶口图像进行了5×5模板的中值滤波,然后进行二值化处理,最后利用canny算子求取瓶口边缘。一帧瓶口中心位置偏左的图像处理结果如图5所示。
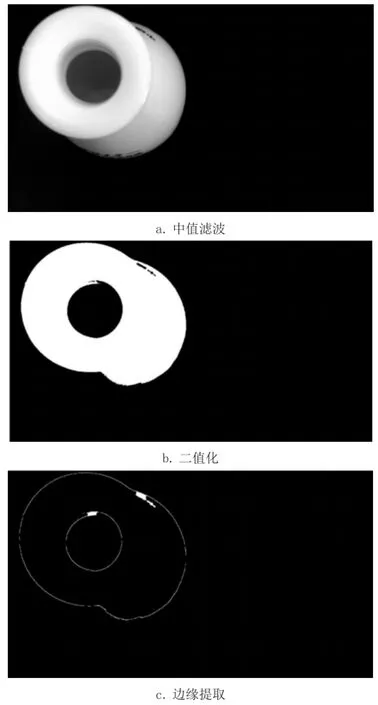
图5 瓶口图像的处理Fig.5 The vase-mouth image processing (a)median filter;(b)binarization;(c)edge extraction
2.1.3求取瓶口中心坐标
经过处理后得到了陶瓷瓶口的清晰边缘,已知瓶口外环的实际半径,依据RANSAC思想,可由瓶口外环边缘上一组离散的点鲁棒性地拟合出圆心位置。拟合圆算法的实现如下:
(1)依据瓶口位置,确定从左侧或右侧的瓶口边缘开始拟合圆;
(2)从边缘圆弧的点集合里取三个随机点,根据三个点作两条垂直平分线;
(3)以所求得两条直线的交点为圆心,交点到圆弧某一点的距离为半径,获得一个拟合圆;
(4)将拟合圆半径与已知瓶口外圆环半径求差,保留差值小的圆,舍弃差值大的圆;
(5)进行20次迭代计算,选择一个最靠近图像侧边的圆作为瓶口的外环圆,其圆心坐标为瓶口中心坐标。左上角的零点为图像坐标系原点,拟合圆和求取坐标的结果如图6所示。

图6 拟合圆和求取瓶口中心坐标Fig.6 Fitting an outer circle of the vase-mouth and obtaining the center coordinates.
2.1.4输出XY坐标
获得图像上的瓶口中心坐标后,通过线性标定方式对相机进行标定,可以建立图像坐标系与机器人实际坐标系的转换关系。绘制一张机器人二维基础坐标系图片放置在瓶口中心位置,其坐标原点与机器人在XY水平面的机械零点位置一致,通过相机采集该图像。然后借助视觉软件VisionPro的CalibNPointToNPointTool标定工具获得图像上各点的坐标值,与机器人基础坐标值进行一一对应,构建一个线形关系的坐标转换模型,实现了将图像坐标转换为实际坐标输出。该坐标作为目标位置引导机器人的X轴和Y轴机械臂在水平面的定位运动。
2.2机器人定位运动
2.2.1求取XY运动量
机器人开始工作前,要求在水平和垂直方向均处于机械零点位置,需要进行初始化。具体操作为:X轴和Y轴归零,处于机器人水平面实际坐标的原点;Z轴归零并锁死,它在整个瓶口中心定位过程中静止。根据任务要求,机器人由零点出发在整个支架水平面上做直线运动,直到Z轴到达坐标位置,完成陶瓷瓶口中心的定位。机器人X轴、Y轴、Z轴机械臂的运动距离为:

2.2.2PLC程序设计
机器人的运动以PLC为核心控制器,采用点到点位置伺服控制模式。PLC从串口通讯获得目标坐标,通过PLC发出脉冲系列来完成位置伺服控制过程,驱动机械臂完成直线运动。程序设计采用模块化结构,主程序负责初始化和调用子程序,瓶口定位和Z轴进入瓶内运动均在子程序中完成,保证了程序结构的简洁和功能扩展的方便。机器人运行子程序流程如图7所示。
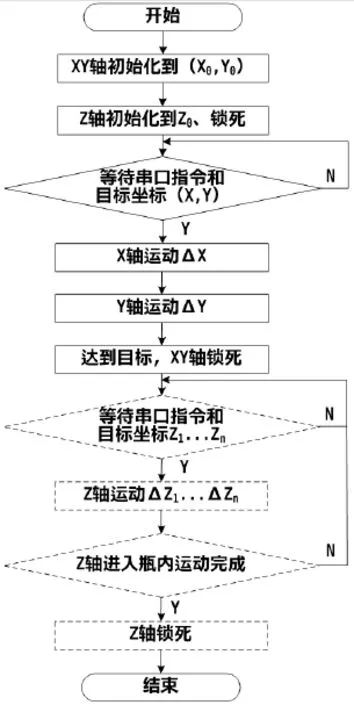
图7 机器人运行子程序流程图Fig.7 The flowchart of robotic operation
3 实验
为了验证机器人系统的有效性和可靠性,基于视觉引导进行了陶瓷瓶口中心的定位实验。选取高度46cm口径34cm的粉彩瓷花瓶为实验对象,花瓶瓶口向上摆放在支架下方中心区域,瓶口中心位置为随机状态。实验时,由计算机软件发出操作指令,相机垂直向下拍摄一帧瓶口图像,软件求取瓶口中心坐标并引导机器人运动,直到Z轴定位到该坐标,机器人反馈运行时间给软件。
由于花瓶位置随机摆放,瓶口中心与机器人机械零点距离不确定,机器人运动时间有长短变化,为了保证运行平稳,通过设置XY轴伺服驱动器的水平速度脉冲,限定一次定位时间小于15s。机器人运行若干次定位实验,经人工校验Z轴与瓶口中心线的直径偏差小于0.1cm,瓶口定位准确率均达100%。此时Z轴与瓶口中心处于同一垂直线,为机器人将相机送入瓶内工作做好了准备。三种典型位置的陶瓷瓶口定位实验结果如表1所示。
4 结论
本文设计了一种基于视觉引导的陶瓷瓶口定位机器人。该机器人为三自由度门式直角坐标结构,搭载了一个COMS相机模组,可拍摄支架下方的陶瓷瓶口图像并送往计算机。计算机软件进行图像预处理和求取边缘,采用比较中垂线两侧非零像素和值大小的方法判断瓶口位置,从左侧或右侧拟合出瓶口外环圆,并求取瓶口圆的中心坐标。该坐标传输给以PLC控制器为核心的伺服驱动系统,引导X轴、Y轴机械臂运动定位到瓶口中心。实验结果表面,该机器人能够快速、准确地定位瓶口中心位置,方便Z轴机械臂将相机送入陶瓷瓶内工作,为机器视觉采集陶瓷瓶内部图像和进行缺陷检测提供了技术基础,具有一定的参考和应用价值。
参考文献
[1]GB/T13524.2-92,中华人民共和国国家标准陈设艺术瓷器--器皿瓷[S].
[2]李庆利,王永强等.陶瓷砖表面缺陷视觉检测算法研究[J].中国陶瓷,2015,51(3):44-47.
[3]谢森林,曾辉等.基于机器视觉的日用瓷表面缺陷检测[J].韩山师范学院学报,2014,35(6):43-48.
[4]晁云,曹利钢.基于机器视觉的陶瓷砖表面缺陷快速检测方法的研究[J].制造业自动化,2013,35(9):18-20.
[5]于彬.基于数字图像处理的陶瓷瓶裂纹检测研究[D].武汉:武汉理工大学硕士学位论文,2007,5:6-9.
[6]张宇,孙容磊.龙门式上肢偏瘫康复训练机器人[J].机械设计与制造,2014(7):186-188.
[7]王永强,李庆利等.基于物联网的陶瓷制品无线检测系统设计与实现[J].中国陶瓷,2016,52(1):45-49.
[8]何小宇.基于伺服电机和PLC的工作台运动控制[J].通讯世界,2015(8):206.
[9]石志君.基于机器视觉的陶瓷圆环件缺口检测与尺寸测量[D].青岛:中国海洋大学硕士学位论文,2013,9:35-36.
[10]陈伟华,马琼雄等.基于VisionPro的工业机器人视觉定位系统[J].组合机床与自动化加工技术,2012(2):81-83.
Ceramic Ware-mouth Positioning Robot Based on Vision Guide
Tang Yanni
(Heyuan polytechnic College,Heyuan,Guangdong,517000)
Abstract:In order to send a visual device into ceramic ware for capturing inner surface images,a kind of 3-DOF Cartesian-coordinate robot is presented in this paper,which positioning for the vase-mouth-center.The robot’s function system and hardware structure are designed,0the control way of positioning motion based on visual guiding is studied:The vase-mouth image is captured by COMS camera,then processed and fitted an outer circle of the vase-mouth,obtained the center coordinates.The coordinates for the target guides XY axis in horizontal movement,until Z axis positioning the vase-mouth-center.The experiment shows that the robot can rapidly and accurately acquire image and positioning vase-mouth,it lays a good foundation for the application of machine vision in inspecting inner surface defects of ceramic ware.
Keywords:vision guide;vase-mouth;inner surface;robot position
中图分类号:TP242.3
文献标识码:A
作者简介
唐燕妮(1981-),硕士,讲师,研究方向为智能控制及机器视觉技术。

表1 陶瓷瓶口定位实验结果Tab.1 The experimental results of positioning
基金项目:河源职业技术学院科技项目(编号:2015KJ09)。
