基于生物免疫机制的无线传感执行网络协同方法
2016-07-19 02:07:21成国营
计算机应用与软件 2016年6期
成国营 王 艳
(江南大学物联网工程学院 江苏 无锡 214122)
基于生物免疫机制的无线传感执行网络协同方法
成国营王艳
(江南大学物联网工程学院江苏 无锡 214122)
摘要以无线传感执行网络为对象,借鉴生物免疫机制,以能量高效、任务高效协作为目标,首先建立无线传感执行网络协同问题与生物免疫机制的类比模型,进而分别针对传感器—执行器协同及执行器—执行器协同问题,提出基于生物免疫机制的传感器—执行器自适应路由协同算法,及执行器—执行器任务协同算法,并给出算法执行流程。最后,通过仿真验证了方法的有效性与优越性。仿真结果表明,采用所提出的协同方法, 不但优化了WSAN信息传递路径, 而且降低了网络能耗, 同时改善了能量均衡指标。
关键词生物免疫协同自适应能量均衡
0引言
无线传感执行网络(WSAN)是最近提出的新型网络模型。WSAN通过分布在各个区域内的传感器节点感知、监测和采集事件信息,以多跳自组织的形式传送到执行器节点。执行器节点根据接收到的信息作出相应的决策,然后作出相应的执行操作,从而实现传感器节点、环境、执行器节点之间的实时动态的交互[1,2]。与无线传感器网络不同,执行器节点的加入导致网络中节点的属性、通信、任务分配更为复杂[3]。可见,在传感器间、执行器间以及传感器与执行器之间达成可靠、实时、低功耗的协作机制是WSAN必须解决的关键问题之一。
文献[15]提出一种基于无线传感网的多机器人任务分配算法。通过神经网络算法,解决多机器人任务分配的随机性约束模型问题,该算法复杂度高,而且会延长执行器节点的响应时间。文献[16]提出了一种优化算法,将全网络任务在簇头上的分配问题建模成0-1非线性优化问题,以最大化所有簇头的生命周期的权重之和为目标函数,但忽略了实时性。文献[14]提出了一种启发式实时任务分配算法EBDG,结合了通信和计算任务的映射和调度,但没有考虑任务的执行顺序。文献[13]为一种基于能量平衡的任务分配算法EBTA,但只适用于单跳簇单元。
基于此, 本文针对WSAN中传感器—执行器、执行器—执行器间的协作问题,在生物免疫系统协作机制的启发下,以节能、网络执行效率为设计目标,提出一种生物免疫启发的WSAN协同方法。
1WSAN网络模型
WSAN节点间协同的目的在于设计一种智能协作机制,使得多个简单的传感、执行节点可以相互间协调共同完成复杂的任务[4]。
WSAN正常工作的先决条件是有效协作,包括传感器与传感器、传感器与执行器、执行器与执行器之间的协作。协作所面临的问题:(1) 如何选择发送节点和信息传输路径,以确保该事件信息的感知快速而可靠地传递到目标执行器;(2) 如何选择执行器来执行任务,确保按时完成任务[5]。WSAN网络结构如图1所示。
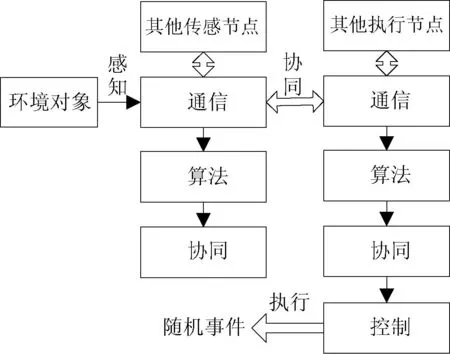
图1 WSAN的网络结构图
1.1生物免疫系统协作机理
生物免疫系统是一个极其复杂的自适应调节系统。通过免疫细胞产生相应的抗体,用于识别和抵抗外部入侵的抗原,并保护人体免受入侵,同时对此类型的抗原进行记忆,当有类似的抗原再次入侵时,快速启动“二次免疫反应”[6]。这种自适应免疫系统具有很强的记忆和学习功能,协作免疫机理中B细胞产生大量的抗原刺激后的抗体,其浓度由B细胞和抗原之间亲和度的大小决定,所受刺激越强,亲和度越高,抗体浓度就越高。其中一部分B细胞,以记忆细胞的形式将被长期保存下来[7],以便在下次遇到同样的抗原时迅速进行二次免疫。
1.2生物免疫系统与WSAN协同之间的关系
从1.1节免疫系统作用机理可以看出,病毒入侵时,机体中的B细胞受到病原体刺激会产生一定浓度的抗体,其浓度由病原体与抗体的亲和度、抗体与相似抗体间的亲和度共同决定,当两者综合作用亲和度之和超过某一阈值时,抗体被激活,消灭抗原。类推到免疫系统中可以发现,传感节点到执行节点的路由选择由相邻节点间的剩余能量和间距决定的,当剩余能量和间距的综合指标值满足一定阈值时,传感节点被选中传递事件信息;而在执行器与执行器的协同中,利用消耗能量与剩余能量之比建立目标函数,运用生物免疫算法来选择最佳的任务执行方案。因此,生物免疫机制与WSAN协作机制之间可建立如表1所示的映射关系。
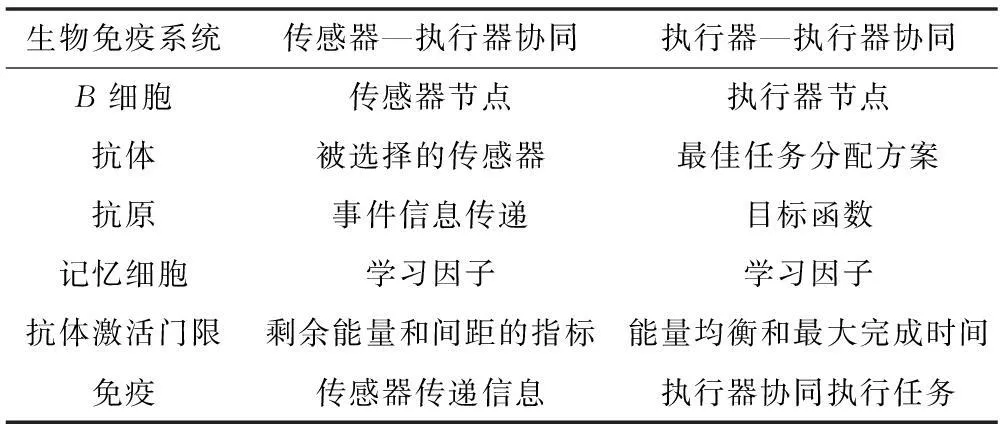
表1 生物免疫系统与WSAN协作机制之间的关系
2无线传感执行网络的协同方法
2.1传感节点与执行节点间的路由协同
生物免疫系统中免疫响应就是通过抗原对抗体的刺激作用,产生大量的多样性抗体,从中选择最匹配去消灭抗原。于此类似,在一定约束条件下,确定从传感器到执行器的路由时,也需选择一条最佳路由。可见,两者的最终目的是一致的。本文在以执行器节点为簇头的分簇网络结构环境下,研究了WSAN网络中传感器节点传递信息的概率问题,主要取决于该传感器节点与上一跳节点的间距以及剩余能量的综合指标。
2.1.1通信节点的选择
定义1假设传感节点的通信半径为R,节点i与相邻节点j之间的距离为d(i,j),则距离约束因子α为:
(1)
定义2设节点i的相邻节点j在传递信息时所消耗的能量和初始能量分别为EC和E,则剩余能量约束因子β为:
(2)
定义P为传感器节点被激活通信的概率,计算公式如下所示:
(3)
其中:Zα·β为下一跳节点j的剩余能量和间距的综合指标,N为节点激活阈值,K为学习因子,Z为定常系数。
当传感器节点j的剩余能量和间距综合指标Zα·β>N时,节点j被选为通信节点的概率较大。可以看出,只要α和β其中一项值为零,不论另一项的值有多高,被选中的概率都将为零,也就不能被选为下一跳节点,从而可以有效筛除那些距离近但剩余能量低的邻居节点。在选择通信节点过程中引入学习因子K, 用以记住或是遗忘事件,相当于免疫系统中的记忆细胞对抗原的“二次响应”。当综合指标Zα·β>N时, 记住该事件, 变更节点j的学习因子为:
K=K-θ
(4)
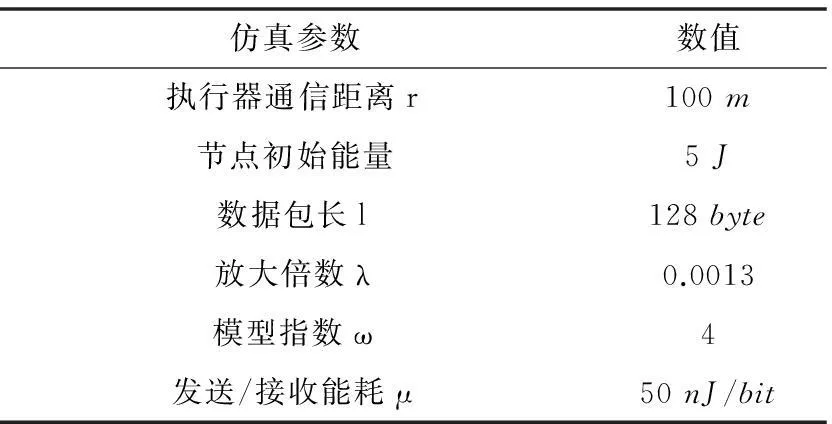
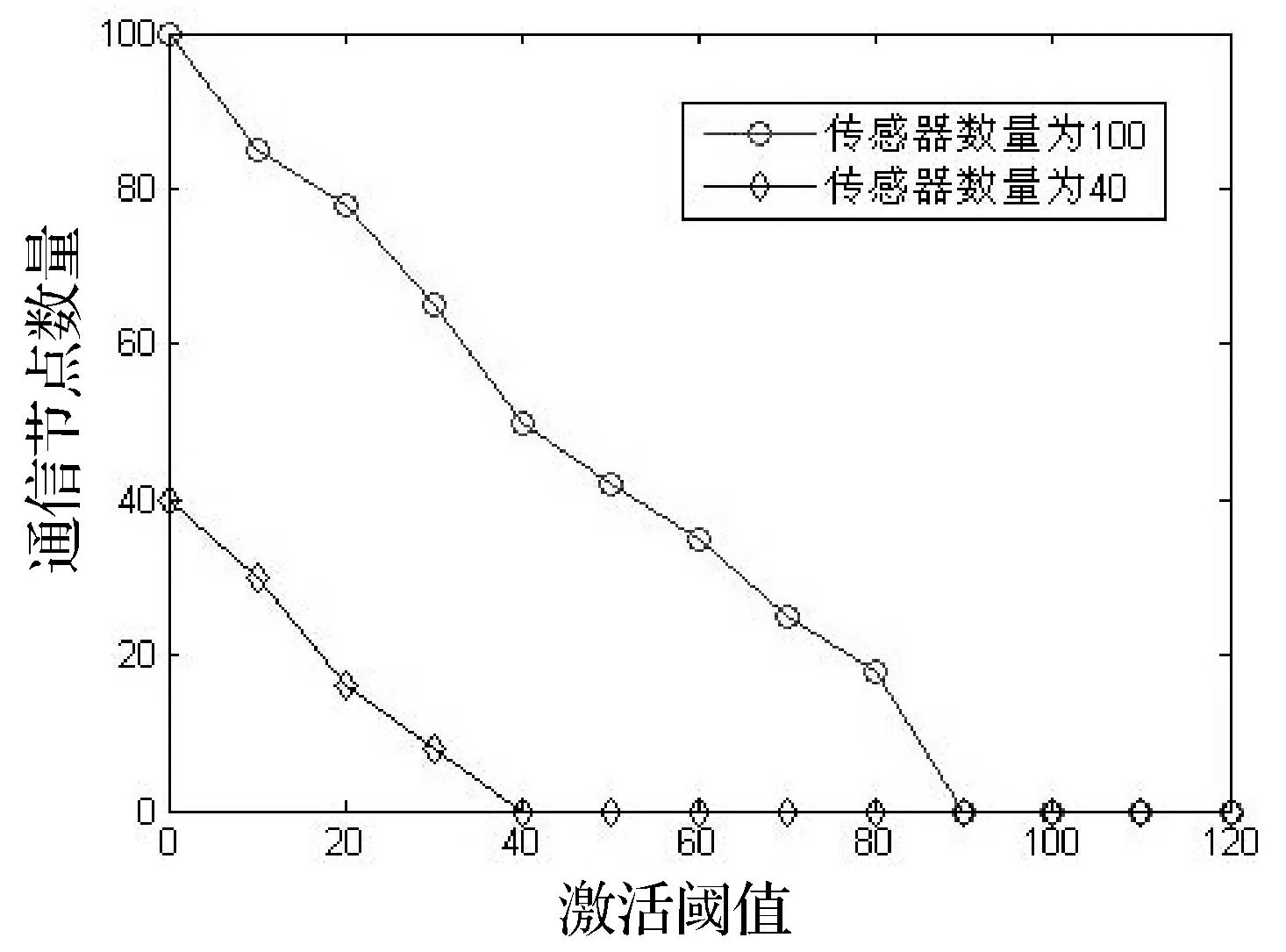
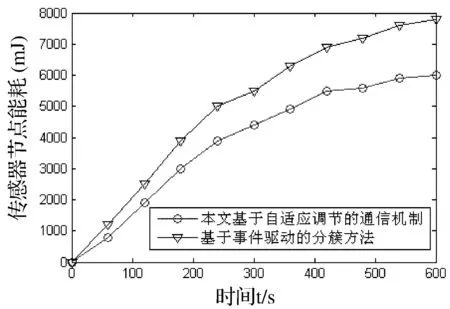
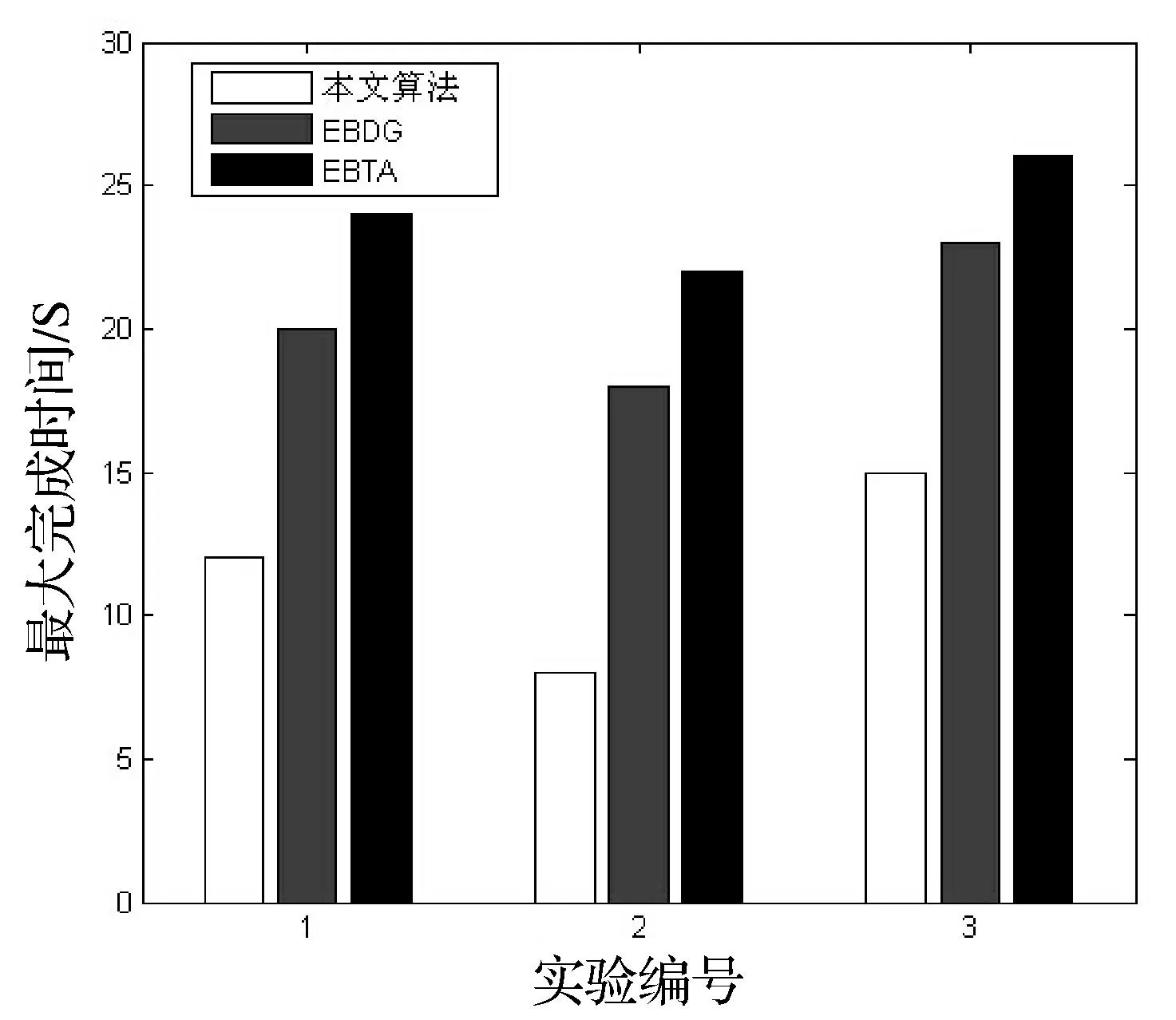
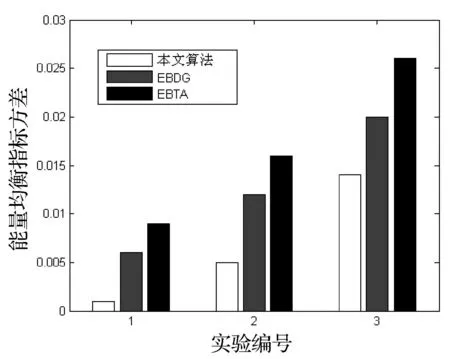
增大节点j被选为通信节点的概率:
当Zα·β K=K+θ (5) 减小节点j被选为通信节点的概率。 2.1.2协同节点数量的确定 上一节中讨论了协同节点的选择方法,P值大的节点被选中的可能性较大。但为了减少能耗,选中的传感器节点不是每个都需要参加通信,确定传感器节点数量就成了协同的一个关键问题。本文基于免疫系统中抗体浓度的自适应调节机制提出了通信节点数量的自适应调节方法。步骤如下: 步骤1在执行器节点设置一个阈值N用于判定节点是否被激活,其初始值尽可能小,使得网络中传感器节点尽可能都成为激活节点。 步骤2在执行器节点利用接收到的事件信息,计算出事件信息传递到执行器节点的误差,计算公式如下[8]: (6) 步骤3将出始阈值增加ΔN,并将新的阈值广播给网络中每个节点,观察D(X)的变化。若D(X)仍在约束范围内,则减少传感器节点的数量,说明以当前的抗体就能免疫抗原,继续增加阈值。 步骤4随着初始阈值N的继续增加,满足约束条件的传感节点的数量逐渐减少。当达到步骤2中最大约束值时,停止增加初始阈值N,并将最后的N广播给所有节点。 步骤5将N与节点亲和度(Zα·β)进行比较,按照式(3)计算的概率来选择通信节点。 2.2执行器节点与执行器节点间的任务协同 由表1的对应关系可知,B细胞受病原体刺激产生抗体来消灭抗原。同样执行器接收到簇内传感器传递的事件信息[9],也必须寻找最佳的任务分派方案来执行任务。基于此本文提出了一种利用生物免疫算法的任务分派方案。 2.2.1执行器—执行器任务协同模型 在以执行器节点为簇头的分簇网络结构中,当事件发生后,传感器节点向本簇执行器节点发送信息。该执行器节点根据事件信息执行相应的任务,或协同其他执行器节点,共同完成任务。针对任务需要多个执行器节点执行问题,协同算法将事件分解为多个子任务,并从能量均衡和最大完成时间两个性能指标方面,将任务分配问题抽象成多目标优化问题,并运用归一化处理方法将之转化为单目标优化问题。最终运行免疫算法得出最佳分配方案。 2.2.2执行器—执行器任务协同相关定义和假设 事件由多个子任务组成,这些子任务可由网络中的多个执行器协同完成,有利于减小事件多发地区的节点执行压力,降低能量消耗,保证执行的实时性,使得网络能耗趋于均衡,延长网络生命周期。对结构相同的执行器有如下假设和定义: 假设1一事件有n个执行步骤,在m个执行节点上执行,在此过程中每个步骤的执行顺序已知。 定义3执行一个突发事件的步骤包括通信、处理数据、动作执行等,其能耗和执行时间可知,称该步骤为一个任务执行单元,简称任务子单元,记为ti,一个任务t=t1∪t2∪…∪t3。 2.2.3任务完成时间 设ti,j为任务i在执行器节点j上的执行时间,T(ji,k)为任务j的第i个子任务在执行器节点k上的执行完成时间。无线传感执行网络中一个子任务的执行时间有两部分组成:数据处理时间tp,数据采集与执行时间tc,得到: ti,j=tc+tp (7) 每个任务在各执行器节点上的完成时间可表达如下: T(j1,1)=tj1,1 (8) T(ji,1)=T(ji-1,1)+tji,1xji,1i=2,3,…,n (9) T(j1,k)=T(j1,k-1)+tj1,kxj1,kk=2,3,…,m (10) 其中xji,k=1表示执行器节点k被选中执行子任务ji,反之则表示没被选中。式(9)表示1号执行器节点执行子任务ji的完成时间等于子任务ji的执行时间加上执行子任务ji-1的完成时间。由此推出: T(ji,k)=max{T(ji-1,k),T(ji,k-1)}+tji,kxji,k (11) 式(11)表示执行器节点k执行子任务ji的条件是子任务ji在上一个执行器节点k-1的子任务已经完成同时执行器k也完成上一个子任务ji-1,则推出最大完成时间为: Tmax=T(jn,m) (12) 要求任务在最短的时间内完成,必须减少任务最大完成时间Tmax,由此得到的其目标函数为: minf1=minTmax (13) 2.2.4能量均衡指数 在任务分配的过程中,不仅需要考虑最大完成时间,同时也必须兼顾能耗均衡指标,延长网络寿命。设Et为单位时间内执行器执行任务所需耗能,则执行器节点k执行任务所需的能耗为: (14) 同时必须考虑到执行器节点剩余能量的约束,每个执行器节点的剩余能量一方面要完成所有子任务,同时还要将执行结果传给下一执行器节点。根据文献[10]提出的发射硬件能耗模型,发送到下一节点和接收能耗为: Es=(λrω+μ)l (15) Er=μl (16) 其中λrω为传输的发射功率;μ发射电路能耗系数;ω为信道衰减倍数;r为执行器节点通信距离;l为帧长。则一个执行器节点k执行所有子任务的总能耗为: (17) 通过上述描述建立如下目标函数: (18) 式(18)为整个网络的执行器能量均衡目标函数,比值越小表示剩余能量多的执行器节点执行任务越多。 2.2.5利用生物免疫算法选择最佳执行方案 在上述两个性能指标优化问题中,不一定存在绝对的最优解,但肯定存在有效解。将这两个目标优化问题转换为单目标优化问题,先分别求出问题中两个目标函数的最优值。然后让每个目标尽量接近各自的最优值,以获得多目标问题的最优解。 设目标函数为f=(f1,f2),评价函数为u(f),由此推出: u(f)=‖f-f*‖ (19) 式(19)为目标值f与理想值f*之间的欧式距离,其值越小表示问题的最优解越好。运行步骤如下: 步骤2比较最优解x1、x2是否相等,如果相等则得到最终最优解,算法终止,否则继续步骤3。 步骤3随机产生权值η1、η2,求解多目标优化问题。 3仿真 对本文提出的基于生物免疫机制的协同方法研究,假设在50m×50m的监测区域,随机部署100个传感器节点,在监测边缘区域放置10个执行器节点,事件发生区域是在以中心位置(50,50)为圆心,半径为5m的圆形区域[11]。仿真实验参数如表2所示。 表2 仿真参数 续表2 如图2所示,节点被激活成为通信节点的数量随着激活阈值的增加而减少。由于节点与事件地点及其他节点的位置都是固定的,相应的能耗和距离的综合指标也就一定,通过自适应调节阈值把个体指标更高的节点挑选出来。 图2 激活阈值与通信节点数的关系 通过图3可以看出,事件信息在执行节点的误差都会随着通信节点数的增大而逐渐减少,之后会收敛于一个稳定的值。此后误差也不会受通信节点数量行影响。因此,最先收敛的点对应的节点数即为最少通信节点数量。这样在保证通信质量的基础上,降低了网络能耗。 图3 通信节点数量与误差D(X)的关系 图4为本文中提出的基于自适应调节的通信机制与文献[5]中提出的传感器节点协作的分簇算法在节能效果上的对比。文献[5]中方法在传感器节点到执行器节点之间形成数据聚合树的过程中,激活的节点数量较多,节点能耗明显增加,由图4可以看出, 本文提出的协同方法在节能上效果更优。 图4 两种方法的能耗效果对比 本文选取了文献[12]中的实验1、实验2、实验3三个测试算例进行比较,对应的任务数量分别是7、12、16;分成的子任务数量分别为25、32、58。 由图5、图6可知,将本文算法与算法EBTA[13]和EBDG[14]进行比较。EBTA是一种基于能量平衡的任务分配算法,但只适用于单跳簇单元;EBDG是一种启发式实时任务分配算法,结合了通信和计算任务的映射和调度,但没有考虑任务的执行顺序。与之相比,通过本文的算法优化处理,协调各执行器节点执行任务的顺序,减少了各任务在执行器节点上执行的最大完成时间。图6表明,本文算法考虑执行器节点能量均衡指数,使得剩余能量越多的执行器节点执行能耗更大的子任务,网络能耗更加均衡,生命周期延长。 图5 三种算法最大完成时间对比 图6 三种算法能量均衡指数对比 4结语 本文基于生物免疫系统协作机理对无线传感执行网络的协作机制进行了研究和探讨。针对传感器与执行器的有效协调,研究了一种以自适应的方式调节通信节点数量的通信路由,并引入了学习因子;针对执行器与执行器的任务协同,在以能量均衡指数和最大完成时间为性能指标的情况下,利用生物免疫算法得到最佳的任务分配方案。经过仿真实验也证实了其高效性。 参考文献 [1] 陈延军,潘泉,梁彦等.基于信息量的分布式协同自组织算法[J].控制理论与应用,2011,28(10):1391-1398. [2]XuM,LeungH.AJointFusion,Powerallocationanddelayoptimizationapproachforwirelesssensornetworks[J].SensorsJournal,IEEE,2011,11(3):737-744. [3]CaiZ,RenX,HaoG,etal.Surveyonwirelesssensorandactornetwork[C]//IntelligentControlandAutomation(WCICA),2011 9thWorldCongresson.IEEE,2011:788-793. [4] 李欣,李若琼,董海鹰.基于仿生群体协同的集群智能控制研究[J].电气自动化,2006,28(4):3-5. [5] 张丽,刘有源,邓莹,等.无线传感执行网络中协作机制的研究[J].交通信息与安全,2007,25(1):2-3. [6]TimmisJ,EdmondsCA.Acommentonopt-aiNet:Animmunenetworkalgorithmforoptimization[J].GeneticandEvolutionaryComputation,2004,3102:308-317. [7]AtakanB,AkanOB.ImmuneSystembaseddistributednodeandrateselectioninWirelessSensorNetworks[C]//Bio-inspiredModelsofNetwork,InformationandComputingSystems,2006:1-8. [8] 陈拥军,袁慎芳,吴键,等.基于免疫系统的无线传感器网络性能优化[J].系统工程与电子技术,2010(5):1065-1069. [9] 易军,李太福,石为人.无线传感器/执行器网络SA协作分簇算法[J].华中科技大学学报:自然科学版,2011(12):89-93. [10]RappaportT.Wirelesscommunicationprinciplesandpractice[M].2nded.London:PrenticeHallPTR,2002. [11]ChenJM,ChengP,YangX,etal.Distributedcollaborativecontrolforindustrialautomationwithwirelesssensorandactuatornet-works[J].IEEETransactionsonIndustrialElectronics,2010,57(12):4219-4230. [12]XiaW,WuZ.Aneffectivehybridoptimizationapproachformulti-objectiveflexiblejob-shopschedulingproblems[J].Computers&IndustrialEngineering,2005,48(2):409-425. [13]YuY,PrasannaVK.Energy-BalancedTaskAllocationforCollaborativeProcessinginWirelessSensorNetworks[J].MobileNetworksandApplications,2005,10(1-2):115-131. [14]ZengZ,LiuA,LiD,etal.AhighlyefficientDAGtaskschedulingalgorithmforWirelessSensorNetworks[C]//The9thInternationalConferenceforYoungComputerScientists.Hunan:IEEE,2008:570-575. [15]XueHan.Bio-inspiredstochasticchance-constrainedmulti-robottaskallocationusingWSN[C]//IEEEIntJointConfonNeuralNetworks.HongKong:IEEEPress,2008:721-726. [16]YounisM,AkkayaK,KunjithapathamA.Optimizationoftaskallocationinacluster-basedsensornetwork[C]//the8thIEEEIntSymposiumonComputersandCommunication.Netherlands:IEEEComputerPress,2003:329-334. A COLLABORATIVE METHOD BASED ON BIOLOGICAL IMMUNE MECHANISM FORWIRELESSSENSORANDACTUATORNETWORK Cheng GuoyingWang Yan (Internet of Things,Jiangnan University,Wuxi 214122,Jiangsu,China) AbstractTaking the wireless sensor and actuator networks as the object, the biological immune mechanism as the reference, and the energy efficiency and efficient task collaboration as the purpose, in this paper we first build the analogy model of the wireless sensor and actuator networks problem in contrast with biological immune mechanism, then further present the biological immune mechanism-based adaptive sensor-actuator routing collaboration algorithm for the collaborations of sensor-actuator and actuator-actuator problems respectively, as well as give the implementation process of the algorithm. Finally the effectiveness and advantage of the proposed method are validated through simulation. Simulation results show that to employ the collaboration method proposed can optimise the information transmission path in WSAN, and can reduce networks energy cost as well, besides, the energy equilibrium index is improved too. KeywordsImmune systemCollaborationAdaptiveEnergy equilibrium 收稿日期:2014-12-03。国家高技术研究发展计划项目(2014AA 041505);江苏省产学研前瞻性项目(BY2013015-15)。成国营,硕士生,主研领域:无线传感执行网络的协同控制。王艳,副教授。 中图分类号TP273 文献标识码A DOI:10.3969/j.issn.1000-386x.2016.06.030


猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
作文成功之路·小学版(2019年8期)2019-09-18 01:12:04
电子制作(2018年23期)2018-12-26 01:01:26
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
读者(2017年14期)2017-06-27 12:27:06
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
读写算(下)(2016年9期)2016-02-27 08:46:31