飞艇式航空磁测系统在不同地理条件下的应用
2016-07-19 05:37赵国凤马柳州
地质学刊 2016年2期
王 波, 赵国凤, 罗 丁, 季 岩, 马柳州, 梁 森
(江苏省地质勘查技术院,江苏南京210049)
飞艇式航空磁测系统在不同地理条件下的应用
王波, 赵国凤, 罗丁, 季岩, 马柳州, 梁森
(江苏省地质勘查技术院,江苏南京210049)
摘要:飞艇式航空磁测系统由无人驾驶飞艇作为飞行平台,搭载高精度航空磁测系统构成,实现无人驾驶、自主导航沿设计测线飞行,进而完成测区内航磁测量工作。此系统研制成功后,分别在不同地形条件、不同纬度区域进行了快速、安全、稳定的飞行测量。实践证明,飞艇式航空磁测系统在高原、中高山、丘陵、平原、沼泽覆盖区内应用效果良好。
关键词:飞艇;航空磁测;无人驾驶;不同地理条件
0引言
航空物探作为一种高效、快速、经济的地球物理勘探方法,在区域地质调查、油气和矿产普查等基础地质工作中一直发挥着重要作用,而其中航空磁测方法应用最为广泛。目前,无人机具有安全性好、适应性强、经济高效等优势,作为一种新的作业手段,发展无人机航空物探技术是一个重要的发展方向(张洪瑞等,2007;李军峰等,2014)。飞艇式航空磁测系统采用自行研制与引进相结合的方式完成了系统集成,并实现无人驾驶航磁测量。
1系统特点
飞艇式航空磁测系统(图1)采用无人驾驶飞艇作为飞行载体平台,搭载了氦光泵高精度航空磁测仪器。飞艇属于轻于空气的飞行器,靠空气浮力升空(甘晓华等,2005),艇囊内部充满氦气,具有很高的安全性。
系统采用的无人飞艇有效载荷为13kg,续航时间为2~4h,巡航速度为50km/h,通过配置的动力装置实现飞行和操控,可沿设定好的航线自主飞行。系统配备的RS-HGB-10型氦光泵航磁系统可实时采集地磁场总场数据、磁通门磁力仪的磁场三分量数据、GPS的飞行实时位置数据等,实时对飞行平台产生的磁干扰进行补偿,并存储采集到的所有数据。同时还有激光测高仪等辅助设备,采集飞行离地高度等其他信息。
飞艇式航空磁测系统既可应用于区域性磁测工作,又可应用在矿区及其外围以及重点成矿靶区的大比例尺磁测工作。与地面磁测相比,飞艇航磁可在地貌较为复杂的地区开展,如植被覆盖率较高的丘陵、沼泽、荒漠等。在这些区域内开展地面人工作业较为困难,而飞艇航磁的飞行速度相对地面采集速度较快,采样密度高,大大提高了工作效率。在一些自然条件比较恶劣的区域,不但可以降低工作人员的安全风险,还能节省大量劳动力。同时,相对于直升机或固定翼等飞行平台的航磁工作方法,飞艇的机械部件少,易于维护和维修,成本低;飞艇式航空磁测系统在空中可沿着设定的航线自主飞行,在气候条件允许的情况下,白天、黑夜均可开展测量工作,具有全天候工作特点;起飞降落要求较低,无需飞机场或跑道,一般起降坪选择在工作区域内或附近半个足球场大小的平坦区域即可满足条件。因此,飞艇航磁因其独特的优势,在某些条件下可替代地面磁测进行快速勘查,完成小范围内的大比例尺工作。

图1 飞艇式航空磁测系统① 艇身主体; ② 吊舱(内置飞控系统与动力系统); ③ 航磁仪主机; ④ 三分量探头; ⑤ 航磁仪主探头Fig.1 Blimp aeromagnetic system
无人飞艇作为飞行载体,具有安全系数高、稳定性好的特点,而且其成本低、易组装,可快速投入使用,具有很大的发展空间和应用前景。目前,在此平台上亦可搭载多种轻型航空探测仪,如摄影、测量设备、电磁测量系统等,实现综合航空测量和地质调查需求(曹立等,2005;张永军,2009;嵇艳鞠等,2013;刘明军等,2013)。
2应用实例
2.1低纬度环境丘陵植被覆盖区
项目一:测区位于赤道附近的西非地区,区内地形以丘陵为主,相对高差<200m,地形变化较为平缓,植被茂密,覆盖率达95%。路况很差,只稀疏分布一些简易道路,交通不便。测区属热带季风气候,高温多雨, 5—10月为雨季,11月至次年4月为旱季,年平均气温约26 ℃。
测区地处赤道附近的低纬度地区,处于地球磁场的水平磁化或以水平磁化为主的条件下,在数据采集时采用双光系氦光泵探头水平安装进行测量,采用近平飞方式。研究区主要地质构造方向为北西西向,因此航磁主测线方向设定为北北东向,飞行方向角为28°~208°,测线间距为500m。
由于研究区位于低纬度地区,磁异常特征表现以负磁异常为主,伴生正磁异常。通过本次1∶5万测量获得的航磁异常(局部)等值线见图2,图中所示主体异常总体表现为近东西向的负异常带,单个异常长轴轴向为北东向,其北侧伴生北东向转东西向的正异常带,推测引起异常的磁源大致呈近东西向雁行排列,呈群集特征。在位场数据处理过程中采用了化向磁赤道方法进行处理(李水平,2009;赵百民等,2009;柳建新等,2014)。
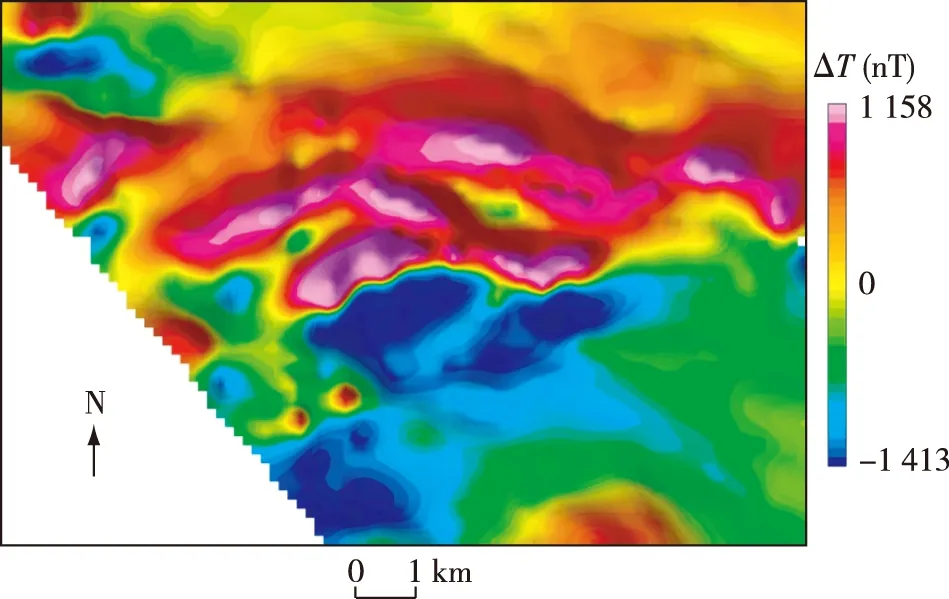
图2 低纬度测区的航磁ΔT等值线平面图(项目一)Fig.2 Contour map showing aeromagnetic anomaly(ΔT) in study area of low latitude (Project No.1)
研究区地层及岩性较为简单,主要为无磁的残坡积含碎石黏土、腐殖质层、洪冲积砂等覆盖,基底为以石英片麻岩和条带状磁铁石英岩为主的变质岩,其中石英片麻岩与条带状磁铁石英岩互层产出。同时,异常所在区域的地面可见铁帽风化壳碎石和以滚石为主的磁铁石英片麻岩矿石。结合地质资料推测,异常对应的磁性体可能为规模较大、埋藏浅的磁铁矿体所引起,因此在区内寻找沉积变质型铁矿具有较好的找矿前景。
2.2高纬度沼泽覆盖区
项目二:测区位于北纬50°左右的我国东北某矿区西北侧。区内气候属寒温带大陆季风气候,雨季多集中在6—9月。10月至次年4月为结冻期,最大冻土深度达3.0m。测区地处小兴安岭北端之低山区,海拔高度为310~600m,区内嫩江贯穿南北,沿江流域多为沼泽湿地,覆盖严重,基岩露头少,地面工作开展较困难。
测区位于高纬度地区,处于地球磁场以近垂直磁化为主的斜磁化条件下,在数据采集时采用单光系氦光泵探头垂直安装进行测量,大致沿地形起伏飞行。区内主要地质构造方向为北西向,因此航磁主测线方向设定为北东向,飞行方向角为37°~217°,测线间距为100m。
1∶1万测量获得的航磁异常等值线见图3,航磁异常整体表现为北西走向,南高北低,多数局部单个异常形态呈椭圆状。与区内已有的1∶5万资料对比发现,所示异常形态基本一致,但在部分地区细节更为清晰(如图3中红圈标示)。结合地质资料可知,此处对应地层主要有晚三叠世—早侏罗世花岗闪长岩、下白垩统的龙江组、光华组等,因为龙江组、光华组地层无磁性或弱磁性,推测区内出现的大面积正异常由岩浆岩引起。
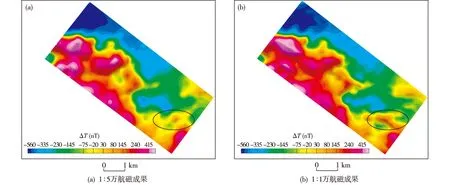
图3 高纬度测区的航磁ΔT等值线平面图(项目二)Fig.3 Contour map showing aeromagnetic anomaly (ΔT ) in study area of high latitude (Project No.2)(a) aeromagnetic results on a scale of 1∶50 000; (b) aeromagnetic results on a scale of 1∶10 000
2.3高海拔荒漠地区
项目三:测区地处柴达木盆地南缘,区内山势陡峻,沟谷深切,植被稀疏,人迹罕至,是典型的高原荒漠。测区属大陆性干旱气候,10月至次年4月为冰冻期,8月最高气温为21.2 ℃,昼夜温差可达29 ℃。1—5月多西北风,6—9月多东北风,最佳工作时间段为6—8月。测区内总体地势西南高、北东低,海拔高度均在3 300m以上,最高海拔高度为4 700m,高差变化较大,高差大于200m的区域占测区3/4或以上。区内主要地质构造方向为北东向,因此航磁主测线方向设定为北西向,飞行方向角为160°~340°,测线间距为100m。由于地形切割频繁,采用近平飞方式。
测区恶劣的自然条件决定了在区内开展工作难度很大,可进行野外工作的时间短,由于高原地区空气稀薄,飞艇在空气中的浮力较低。为了使飞艇式航空磁测系统可以在高原地区进行航磁测量工作,对飞艇进行了相应改进,增加艇囊的长度,扩大其储气量,从而增加飞艇的载重能力,同时采用更大功率的发动机和大尺寸桨叶提升飞艇的飞行动力。
将本次获得的成果与以往1∶1万地面高精度磁法测量成果进行对比(图4)。异常形态与地磁成果基本相似,异常均被分成南北2个子异常,说明该区航磁区分异常能力降低不大,更不会遗漏磁异常。结合地质资料可知,异常附近见有矽卡岩,推断该异常与深部中碱性岩体及矽卡岩有关,深部具有寻找多金属矿的潜力。
2.4结果与讨论
目前,飞艇式航空磁测系统已在不同地形条件、不同磁场区域、不同气候环境下进行了快速、安全、稳定的飞行测量。由表1可知,飞艇式航空磁测系统在这3个项目中性能稳定,其中自驾导航精度较好,测网疏密度均在10m误差范围内,可满足大比例尺的测量需求;平均离地飞行高度与地形起伏关系较大,动态噪声水平与航磁测量总精度均满足相应的设计与规范要求。
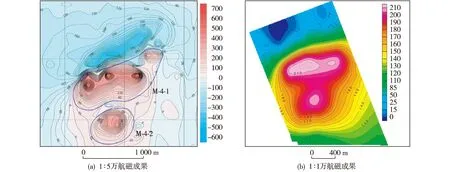
图4 高海拔测区1∶1万航磁成果与地磁成果对比图(项目三)Fig.4 Comparison of aeromagnetic results and geomagnetic results on a scale of 1∶10 000 in study area of high altitude(Project No.3)(a) geomagnetic results on a scale of 1∶10 000; (b) aeromagnetic results on a scale of 1∶10 000
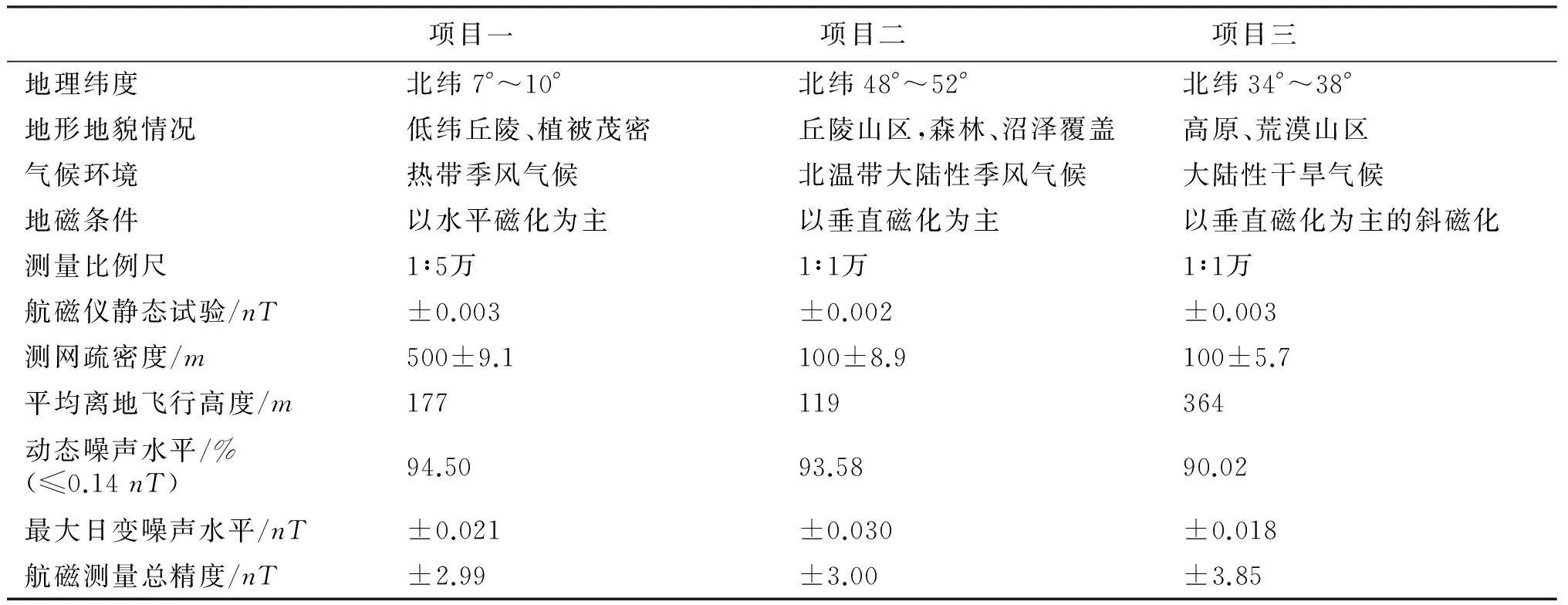
项目一 项目二 项目三地理纬度北纬7°~10°北纬48°~52°北纬34°~38°地形地貌情况低纬丘陵、植被茂密丘陵山区,森林、沼泽覆盖高原、荒漠山区气候环境热带季风气候北温带大陆性季风气候大陆性干旱气候地磁条件以水平磁化为主以垂直磁化为主以垂直磁化为主的斜磁化测量比例尺1∶5万1∶1万1∶1万航磁仪静态试验/nT±0.003±0.002±0.003测网疏密度/m500±9.1100±8.9100±5.7平均离地飞行高度/m177119364动态噪声水平/%(≤0.14nT)94.5093.5890.02最大日变噪声水平/nT±0.021±0.030±0.018航磁测量总精度/nT±2.99±3.00±3.85
通过上述试验,可以确定飞艇式航空磁测系统在高原、中高山、丘陵、平原、沼泽覆盖区内应用效果良好,获得的航磁数据符合设计要求,相比于地面勘查方法,缩短了勘查项目的运行时间。
3结论
自2011年成功试验飞行后,飞艇式航空磁测系统先后在不同地理条件下进行实际应用飞行,取得了较好的测量效果。除关键部位(如发动机)外,无人飞艇均为无磁材料制造,使得飞行载体本身的磁干扰非常小,特别适用于中大比例尺的高进度航磁测量工作。但是,由于飞艇采用艇身充满氦气产生的浮力抵消自重升空,庞大的体积受到天气(特别是风力)的影响较大,使得该系统在部分天气条件下使用具有一定的局限性。此外,在地形切割较深、相对高差较大的地区,会受到局部小气候的干扰,飞艇严格沿地形起伏飞行难度较大。在这种地形条件下,要保证飞行安全并获得大比例尺的高精度数据,系统还需要进一步改进。综上所述,该系统具有其独特的优势,在以下3个方面都将有很好的应用前景。
(1) 大多数重要成矿靶区地形复杂,开展地面施工较为困难;矿区及外围的区域或被不同的企业申请了探矿权,这些探矿权区面积小而分散。应用飞艇式航空磁测系统可在这些区域的整装勘查工作中发挥较好的作用。
(2) 飞艇式航空磁测系统在境外勘查工作中有着很好的应用前景。该系统在设备维护和出入境手续等方面相对简单,可避免常规机载航空测量手段在起飞场地、后勤保障、空域使用方面的种种局限性,特别是在南美、非洲及东南亚等经济欠发达地区和自然环境条件恶劣地区。
(3) 无人飞艇作为飞行平台具有很大的扩展空间,可搭载多种轻型航空探测仪,拓展其在地质、遥感、环境、气象等不同工作领域中的应用。
参考文献:
曹立,潘然,田挚, 2005.遥控飞艇数字航空摄影系统[J].测绘与空间地理信息,28(5):92-93.
甘晓华,郭颖,2005.飞艇技术概论[M].北京:国防工业出版社.
嵇艳鞠,王远,徐江,等, 2013.无人飞艇长导线源时域地空电磁勘探系统及其应用[J].地球物理学报,56(11):3640-3650.
李水平, 2009.低纬度地区ΔT异常处理解释方法在坦桑尼亚某地区金矿预查中的应用[J].物探与化探,33(6):657-659.
刘明军,林宗坚,苏国中, 2013.无人飞艇低空航测系统在1∶500大比例尺地形图航测中的应用[J].遥感信息,28(4):69-74.
柳建新,李庆华,曾宥元,等, 2014.地面高精度磁法在塞拉利昂洛琴铁矿区的应用[J].物探与化探,38(4):649-653.
李军峰,李文杰,秦绪文,等, 2014.新型无人机航磁系统在多宝山矿区的应用试验[J].物探与化探,38(4):846-850.
张洪瑞,范正国, 2007. 2000年来西方国家航空物探技术的若干进展[J].物探与化探,31(1):1-8.
张永军, 2009.无人驾驶飞艇地空遥感影像的几何处理[J].武汉大学学报(信息科学版),34(3):284-288.
赵百民,郝天珧,徐亚,2009.低纬度磁异常的转换与处理[J].地球物理学进展,24(1):124-130.
The application of unmanned blimp aeromagnetic system in different geographical conditions
WANG Bo, ZHAO Guofeng, LUO Ding, JI Yan, MA Liuzhou, LIANG Sen
(GeologicalExplorationTechnologyInstituteofJiangsuProvince,Nanjing210049,Jiangsu,China)
Abstract:Adopting unmanned blimp as its platform and equipped with high-precision aeromagnetic survey system, unmanned blimp aeromagnetic system realized unmanned driving and autonomous navigation along the designed survey line, so as to complete aeromagnetic survey in the studied area. After a successful development, fast, safe and steady trial flights were carried out in different terrain conditions and latitudinal areas. Based on the trials, it was ensured that the system has good effects on aeromagnetic survey in the areas of plateaus, mountains, hills, plains and swamplands.
Keywords:blimp; aeromagnetic survey; unmanned driving; different geographical conditions
收稿日期:2015-10-08;修回日期:2015-11-20;编辑:陈露
基金项目:中国地质调查局地质矿产调查项目“艇载航磁勘查系统示范应用与推广”(12120113090700)
作者简介:王波(1973—),男,研究员级高级工程师,主要从事地质勘查与信息技术的集成研究工作,E-mail: njwangbo@qq.com
中图分类号:P631.2+22
文献标识码:A
文章编号:1674-3636(2016)02-0341-05
:10.3969/j.issn.1674-3636.2016.02.341
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
小学科学(学生版)(2017年8期)2017-12-20
空中之家(2017年11期)2017-11-28
汉语世界(2017年5期)2017-09-21
太空探索(2016年12期)2016-07-18
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年10期)2015-11-07