基于无人飞艇平台的航磁测量数据野外快速处理系统的实现
2016-07-19 05:37冯自成赵国凤孙希莹刘俊伯
地质学刊 2016年2期
冯自成, 赵国凤, 孙希莹, 陈 伟, 刘俊伯
(江苏省地质勘查技术院,江苏南京210049)
基于无人飞艇平台的航磁测量数据野外快速处理系统的实现
冯自成, 赵国凤, 孙希莹, 陈伟, 刘俊伯
(江苏省地质勘查技术院,江苏南京210049)
摘要:介绍了基于无人飞艇平台的航磁测量数据野外快速处理系统的研发背景,阐述了该系统的研发环境、系统架构、数据组织、系统数据处理框架、系统功能以及系统特点。结合基于无人飞艇平台的航磁测量实际情况,研发了数据管理、数据质量评价、数据校正以及数据制图等应用功能。
关键词:无人飞艇;航磁测量;数据处理;系统功能
0引言
近年来,无人机航磁测量技术(晏磊等,2004;李军峰等,2014;崔志强等,2015)得到了快速发展与应用。无人飞艇平台的航磁测量(彭晓东等,2009;张津伟等,2014)可在小范围区域内开展大比例尺快速精细勘查,具有昼夜连续工作的特点。目前,国外航磁测量数据处理软件使用较为广泛的是Oasismontaj(加拿大Geosoft公司),但对于无人飞艇平台的航磁测量而言,在使用中会遇到下列问题:(1) 无法直接导入航磁测量架次数据,需借助其他软件将其转换为可导入的格式。(2) 航线设计功能没有考虑航线沿地形起伏,只提供单条测线的首尾点坐标,无法满足实际飞行需求。(3) 生成的飞行架次数据质量统计以图面形式显示,无法导出质量统计报告。国内所使用的野外航磁测量数据处理软件多为各自内部开发使用。
无人飞艇平台的航磁测量野外数据处理与常规航磁测量数据处理方法基本相同,主要依据航空磁测技术规范,需要完成航磁测量采集数据格式转换、坐标转换、质量统计、数据校正以及数据成图等工作,但因为是无人驾驶飞行平台,所采集的航磁测量数据每架次为连续数据,不区分单条测线的开始与结束,需要后期的测线裁剪处理。上述工作通常采用常规软件按流程分步处理:(1) 采集数据格式转换:使用仪器厂家提供的磁力仪数据转换软件将采集的二进制文件转换成TXT文档;(2) 坐标转换:首先使用MicrosoftExcel对坐标格式(度分转换成度)进行转换,然后使用坐标转换工具将经纬度坐标转换为平面直角坐标;(3) 测线裁剪:使用MapInfo对架次数据进行裁剪,得到有效测线数据;(4) 质量统计:使用MicrosoftExcel对日变观测静态噪声、测线动态噪声、飞行高度进行统计,使用AutoCAD对测线长度以及偏航距进行统计;(5) 数据校正:分别使用GeoMag、GemLink和MicrosoftExcel对航磁测量数据进行正常场校正、日变校正以及飞行方向差和滞后校正;(6) 数据成图:使用MapInfo对校正数据绘制航磁异常剖面平面图。
综上所述,无人飞艇平台的航磁测量数据处理需要投入多专业技术人员同时使用多种软件才能完成,处理流程复杂,而且容易出现差错;同时因采集的航磁测量数据采样率相对地磁数据较高,数据量大,普通软件常常因无法加载全部数据易出现崩溃,或只能分段处理,使野外数据处理需要花费较长时间,工作效率低下。为了快速处理采集的航磁测量数据,研发了相应的数据处理系统,以满足野外数据处理快速化、流程化、规范化。
1系统研发
1.1研发环境
WindowsXP及以上版本操作系统、VisualC++软件开发工具及VisualC++语言。
1.2系统架构
采用MVC框架模式(甘早斌等,2005;黎永良等,2005;李春红等,2007),M层为数据库和数据服务层,数据库为Access数据库,负责存储各类属性表数据;数据服务依靠Access属性表管理引擎,实现对航磁测量原始资料数据和各图层数据存取管理。C层为业务平台和业务应用层,业务平台主要为系统业务功能提供支撑,包括GIS基础平台、通用业务处理模块等;业务应用是基于数据库、数据服务以及业务平台的功能,实现面向用户的业务逻辑功能(尚建嘎等,2007)。V层为数据表现层,实现数据通过用户界面(窗口)显示给用户,同时接受用户的交互导入(图1)。
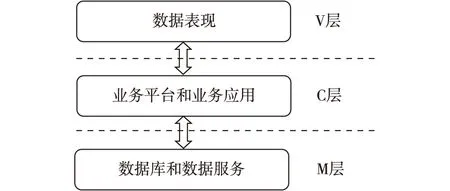
图1 系统架构图Fig.1 Diagram of system structure
1.3数据组织
系统基于Access数据库(刘向东等,2012)设计,Access表格类型主要有工区管理、地图投影、起降坪管理、设计测线管理、航线设计管理、日变观测、架次管理、临时测线管理、成果测线管理等(表1),Access数据库中各管理表格之间通过关键字链接。这样设计可保证重要数据不被随便覆盖,且各种预处理过程和步骤可以追溯,方便项目质量检查。
1.4系统数据处理框架
系统遵循数据快速入库,数据快速处理原则,主要实现原始数据直接入库、查询、测线裁剪、质量统计、数据校正、数据制图等基本功能。其内部数据处理框架见图2。
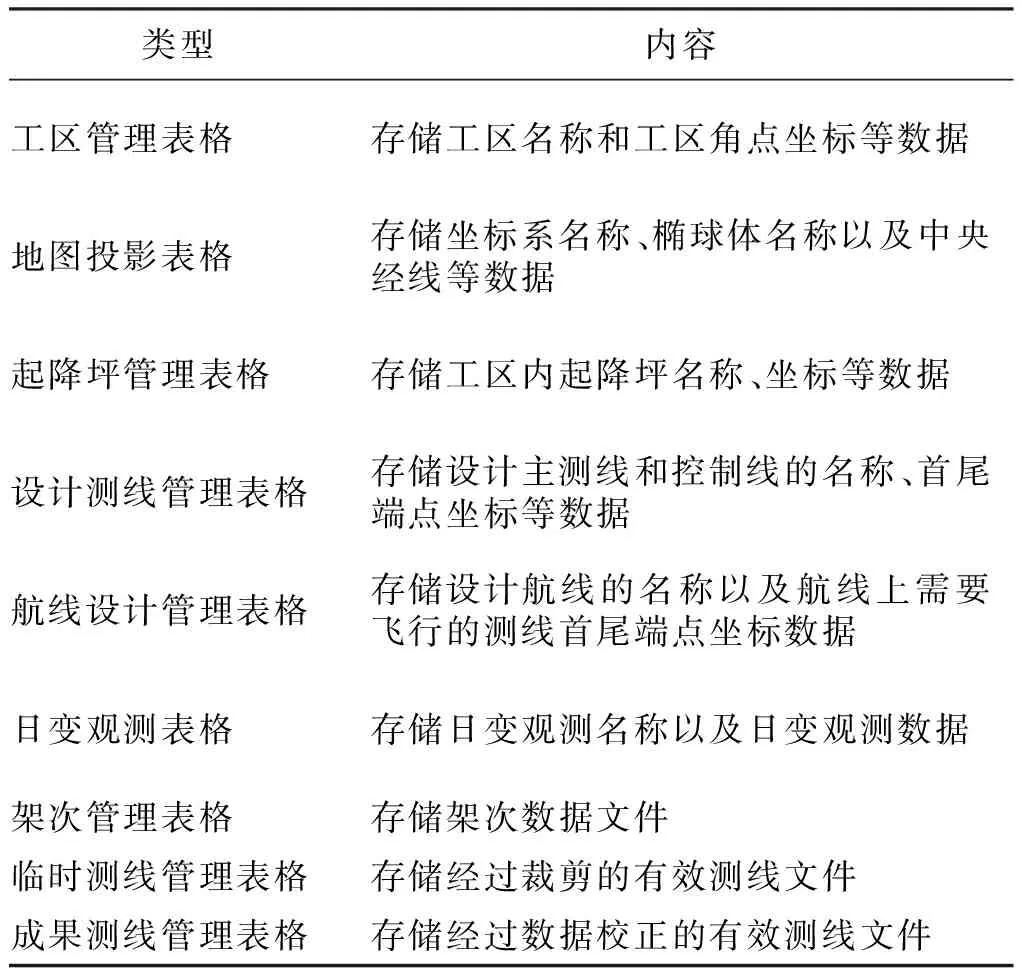
表1 Access数据库管理表格类型及内容
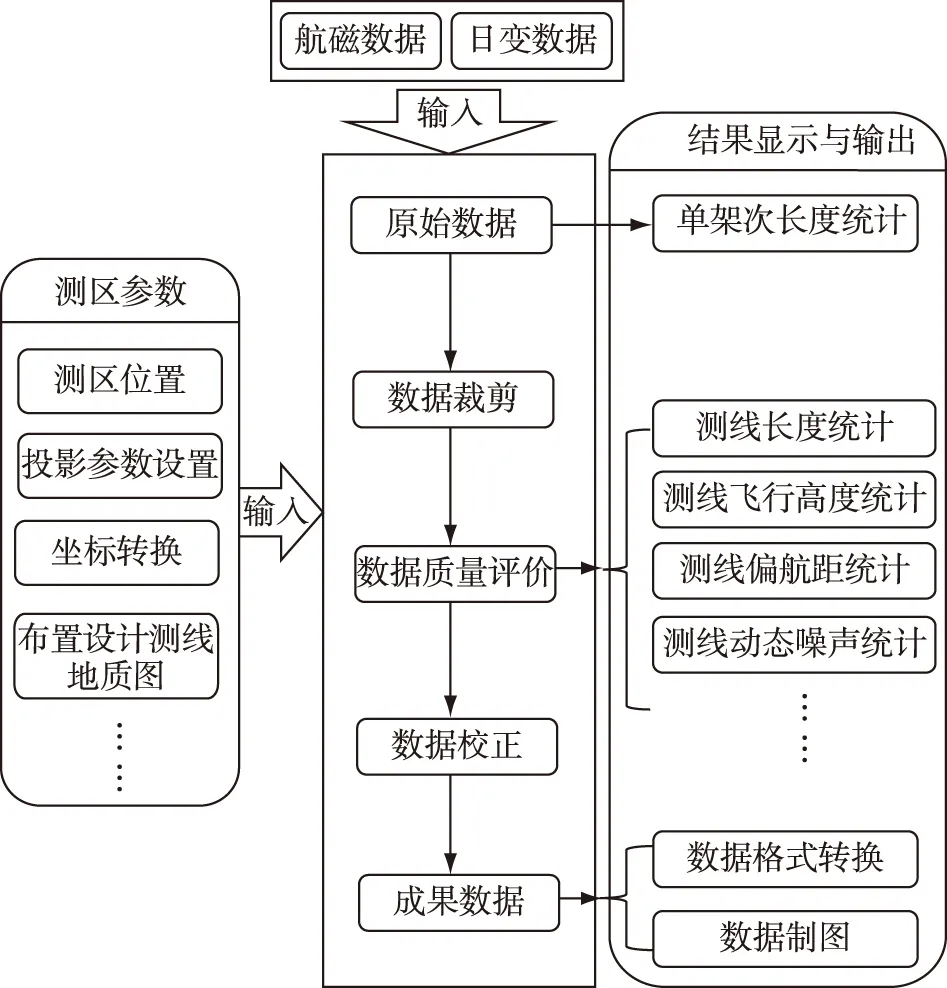
图2 数据处理框架Fig.2 Data processing framework
2系统功能
系统的主要功能分为数据管理、数据质量评价、数据校正和数据制图4个部分(图3)。
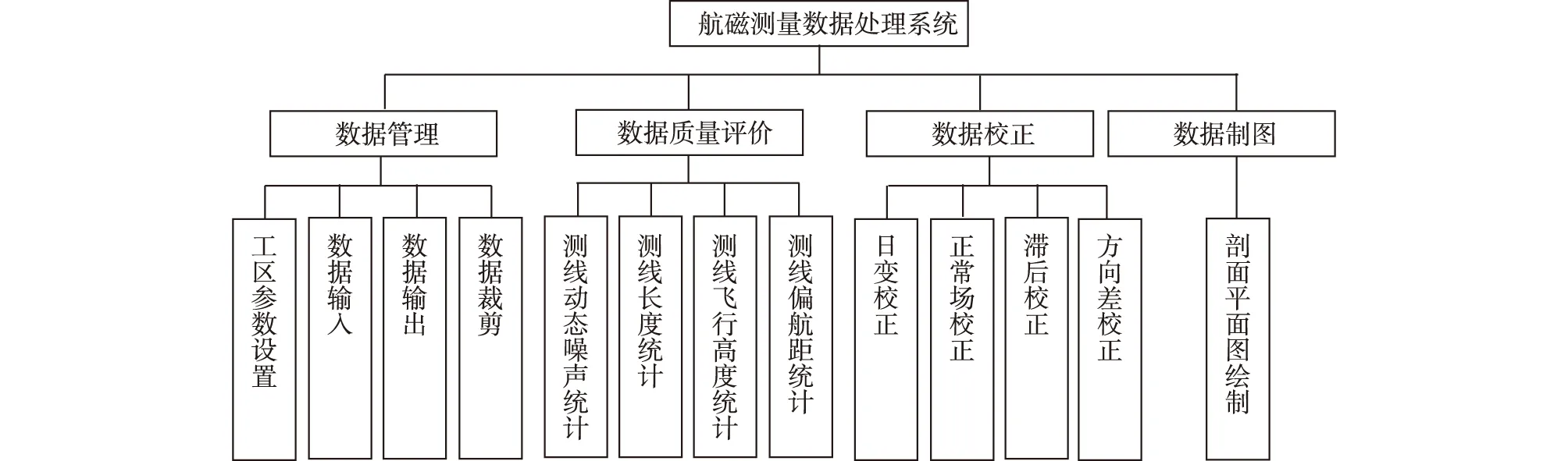
图3 系统功能结构图Fig.3 System function diagram
2.1数据管理功能
包括工区参数设置、数据导入和导出、航线设计以及测线裁剪等模块。
2.1.1工区参数设置主要包括数据库新建、投影参数设置、工区新建、坐标转换等功能。
2.1.2数据导入和导出数据导入主要包括设计测线数据导入、磁日变观测数据导入和架次数据导入等功能。数据导出主要包括生成的航线架次文件导出、测线数据导出、质量统计报告导出等。
2.1.3航线设计基于工区设计测线数据、工区地形数据、设计飞行高度以及飞艇爬升性能等因素,充分考虑航线沿地形起伏飞行,综合计算出每架次航线上的控制点坐标和高程,避免因人工取点出现的人为误差,从而有效提高无人飞艇平台的航磁测量工作效率(图4)。
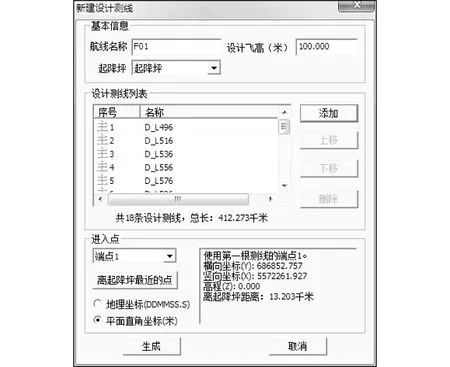
图4 航线设计Fig.4 Route design
2.1.4测线裁剪利用建立的工区范围,通过人机交互方式对飞艇起飞、降落和转弯时采集的无用数据进行删除,保留有效测线数据(图5)。
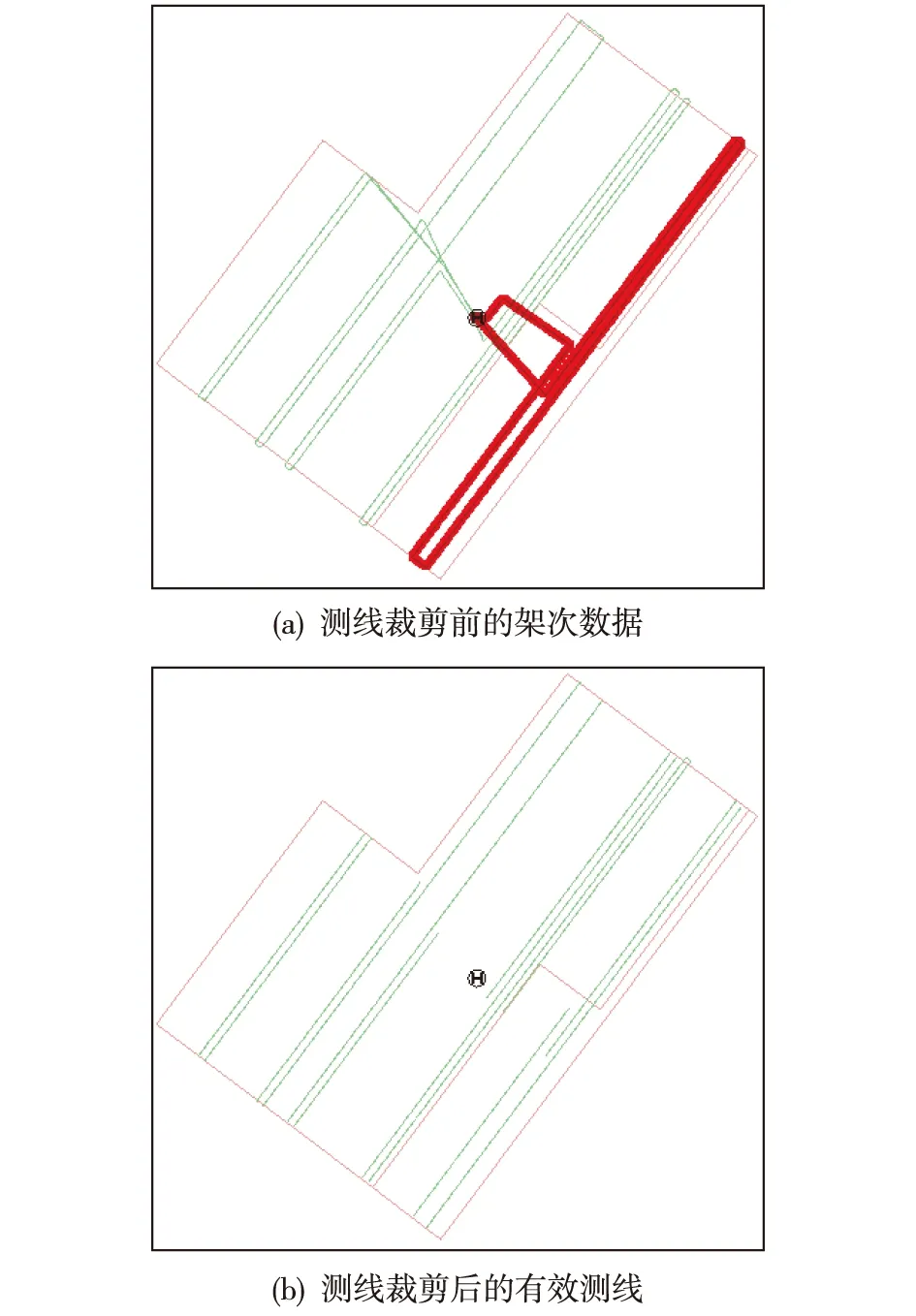
图5 测线裁剪Fig.5 Survey line cutting(a) flight data before survey line cutting; (b) effective lines after survey line cutting
2.2数据质量评价功能
按照航空磁测技术规范要求,对采集数据进行统计与控制,保证测量数据满足工作设计和规范要求。数据质量评价主要包括测线动态噪声水平、测线长度统计、飞行高度统计以及偏航距统计等。
统计结果以图表窗口方式展示,并支持打印出图,方便用户编写质量报告。
2.2.1测线动态噪声水平测线裁剪工作完成后,即可统计测线动态噪声水平。
测线动态噪声水平功能实现过程:(1) 导入实测航线数据;(2) 搜索实测航线上各采样点对应的航空磁力仪读数Ti;(3) 采用抽点方法,保证采样间隔为0.5s,并舍掉水平梯度>600nT/km异常上的测点值,统计参加计算的采样点总数n,按照公式(1)计算测线动态噪声水平Si。
(1)
Bi=Ti-2-4Ti-1+6Ti-4Ti+1+Ti+2
(2)
(3)

2.2.2测线长度统计测线裁剪工作完成后,可对单条测线进行长度统计。
测线长度统计功能实现过程:导入实测航线数据,搜索单条实测航线上首尾点对应的x坐标值和y坐标值,按照公式(4),计算单条测线长度L。
(4)
2.2.3测线飞行高度统计测线裁剪完成后,可对单条测线进行飞行高度统计。
测线飞行高度统计功能实现过程:(1) 导入实测航线数据;(2) 搜索实测航线上各采样点对应的雷达高度计读数ΔhRi,同时搜索测线实测采样点总数N;(3) 根据ΔhRi和N,统计每条测线平均飞行高度、最大飞行高度、最小飞行高度以及不同飞行高度区间采样点占测线总采样点数的百分数。
(5)
2.2.4测线偏航距统计测线裁剪完成后,可对单条测线进行偏航距统计。测线飞行高度统计功能实现过程:(1) 实测航线数据和设计航线数据;(2) 根据实测采样点数在设计航线上内插设计点坐标,计算实测点与设计点之间的距离δi,同时搜索测线实测采样点总数N;(3) 根据δi和N统计出平均偏航距A、最大偏航距以及按照设定的偏航等级统计出不同偏航区间采样点占总采样点的百分数(图6)。平均偏航距A的计算公式为:
(6)
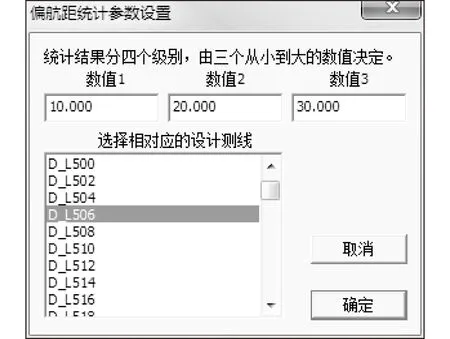
图6 测线偏航距统计界面Fig.6 Interface of statistics of survey line cross track distance
2.2.5质量评价功能实例以L666主测线为例,分别使用该系统和航空磁测技术规范中列出的公式统计该条测线的动态噪声水平、测线长度、平均飞行高度以及平均偏航距(表2)。
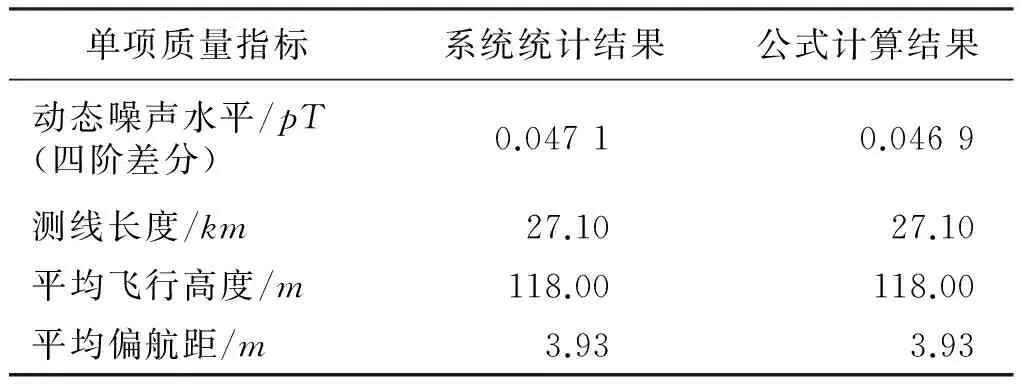
表2 L666线质量统计表
由表2可知,使用该系统统计的各项质量指标结果与使用规范(DZ/T0142—2010)中的公式计算结果几乎一致,证明系统运算结果可信。
2.3数据校正功能
根据航空磁测技术规范要求,采集的航磁测量原始数据值(Ti 1)需要进行各项校正,主要有地磁正常场校正(Ti 2)、磁日变校正(ΔTi 3)、滞后校正(ΔTi 4)以及飞行方向差校正(ΔTi 5)等模块。
原始数据Ti1按下式进行计算,求得采样点i的ΔTi值:
ΔTi= Ti 1-Ti 2-ΔTi 3-ΔTi 4-ΔTi 5
(7)
地磁正常场校正(Ti 2):采用国际地磁参考场IGRF2010.0模型提供的系数计算,即从每个采样点的实测值中减掉其实测经纬度计算出具体的IGRF值。
磁日变校正(ΔTi 3):检查磁日变实测记录,去掉记录中的人文磁干扰和其他非磁日变成分,然后减去连续观测24h磁日变后计算的基本场值得到磁日变校正值,再对航空磁测原始数据逐点校正。
滞后校正(ΔTi 4):由于负责采集磁场原始数据的航磁仪探头和负责采集坐标数据的GPS之间存在一定的距离,根据飞行载体的飞行速度,计算出滞后时间,再根据采样率,便可进行滞后校正工作。
飞行方向差校正(ΔTi 5):通过高度十字剖面飞行获取数据,并分析磁补偿后数据中残余的方向影响,计算出方向差校正值,并应用其对航空磁测原始数据进行校正。
2.4数据制图功能
系统主要支持绘制航磁异常剖面平面图,图形文件可转换为MapGIS明码格式,便于后期在MapGIS软件中的使用整饰。
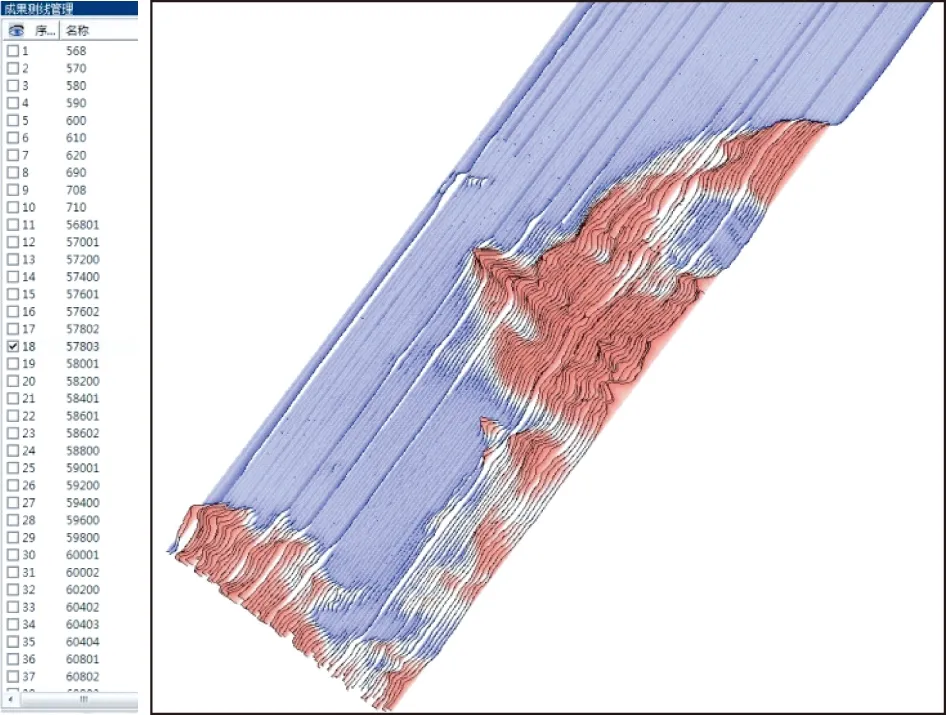
图7 航磁异常剖面平面图界面Fig.7 Interface of profiles and planes of aeromagnetic anomaly
图7为我国黑龙江省某地区1∶1万艇载航空磁测航磁异常剖面平面示意图,成图采用惯用的颜色方案,即正值部分选用红色渐变表示,负值部分选用蓝色渐变表示。
3系统特点
系统按照航空磁测技术规范要求,各个关键步骤按数据处理流程在软件中运行;实现数据的预处理和质量评价计算机化和自动化,提高工作效率;重要的数据和资料统一集中用数据库进行存储和管理,避免手工操作多个数据文件引起误删、覆盖等;防止无授权的复制和修改,保证数据安全。
3.1实现航空磁测数据快速处理
系统集成的坐标转换、数据导入和测线裁剪功能使得数据处理工作大大简化,无需借助其他软件或工具,便可完成架次数据格式转换、目标源坐标转换以及测线裁剪工作,以往多专业人员参与和各种软件使用的情况不再出现,完全由系统自动化替代,从而真正实现航空磁测数据快速处理的目的。
3.2多类型航磁测量数据格式识别
系统能够识别多类型航磁测量数据格式,主要有RS-HGB10数据文件(*.mgt)、PicoAGISPEI数据文件(*.p??)、GeosoftOasismontaj文件(*.xyz)和ASCII文件(*.txt、*.csv、*.area)等。其中RS-HGB10数据文件(*.mgt)为二进制文件,在加载该类型文件时,无需借助二进制数据转换软件进行格式转换便可直接读取。
3.3剖面平面图方式的数据显示
利用GIS的图层管理模式(陈建春,2000;于长春等,2003),以剖面平面颜色渐变图方式动态直观地显示测线数据,克服单一剖面显示方式不能观测测区整体情况(胥值礼等,2014)的缺陷。系统生成的剖面平面图中,可以根据成图比例尺大小调整测线剖面纵比例尺范围,确保图面满足规范要求且美观。
4结论
该系统自研发成功,先后应用于西非塞拉利昂、我国的福建、黑龙江以及青海等地的无人飞艇平台航磁测量项目。系统数据处理测线已达1.69万km。大量实测数据的处理结果表明,系统运行稳定可靠,能够很好地满足航磁测量数据野外快速处理的要求。
随着该系统后续的持续使用以及数据处理的信息反馈,会对功能进行完善和增加,例如测线设计、仪器稳定性统计、磁测总精度计算等,使之能够成为航磁测量野外数据快速处理综合软件,进而更好地服务于无人飞艇平台的航磁测量系统。
参考文献:
陈建春,2000.VisualC++开发GIS系统[M].北京:电子工业出版社.
崔志强,胥值礼,孟庆敏,等,2015.现行三类平台航磁勘查系统特点及勘查效果评述[J].物探化探计算技术,37(4):437-443.
DZ/T0142—2010,航空磁测技术规范[S].
甘早斌,彭彬,李志欣,2005.基于集中控制的MVC模型[J].计算机工程与设计, 26(2):454-455.
黎永良,崔杜武,2005.MVC设计模式的改进与应用[J].计算机工程,31(9):96-97.
李春红,高建华,2007.使用分层模型改进MVC设计架构[J].计算机工程与设计,28(4):766-769.
刘向东,张立海,赵立鸿,等,2012.钻孔基本信息数据库建设与信息化管理应用开发[J].地质学刊,36(4):360-365.
李军峰,李文杰,秦绪文,等,2014.新型无人机航磁系统在多宝山矿区的应用试验[J].物探与化探,38(4):846-850.
彭晓东,林宗坚,2009.无人飞艇低空航测系统[J].测绘科学,34(4):11-14.
尚建嘎,刘修国,张宝一,2007.层次风格固体矿产储量估算软件体系结构设计[J].计算机应用研究,24(8):255-257.
胥值礼,孟庆敏,李文杰,等,2014.基于OasisMontaj平台的航空物探数据处理软件系统[J].物探化探计算技术,36(3):257-261.
于长春,郭志宏,眭素文,2003.航空物探领域的GIS开发与应用[J].物探化探计算技术,25(1):39-44.
晏磊,吕书强,赵红颖,等,2004.无人机航空遥感系统关键技术研究[J].武汉大学学报(工学版), 37(6): 67-70.
张津伟,武力聪,杨春,等,2014.几种低空高精度航空磁测系统及找矿应用分析[J].矿产与地质,28(1):124-128.
Implementation of field fast processing system of aeromagnetic survey data based on unmanned blimp platform
FENG Zicheng, ZHAO Guofeng, SUN Xiying, CHEN Wei, LIU Junbo
(GeologicalExplorationTechnologyInstituteofJiangsuProvince,Nanjing210049,Jiangsu,China)
Abstract:This paper presented development background, the development environment, system architecture, data organization, the framework of system data processing, system function and features of this fast processing system of aeromagnetic survey data based on unmanned blimp platform. In combination with the practical situation of aeromagnetic survey based on unmanned blimp platform, the authors developed some application functions such as data management, data quality evaluation, data correction and data mapping.
Keywords:unmanned blimp; aeromagnetic survey; data processing; system function
doi:10.3969/j.issn.1674-3636.2016.02.259
收稿日期:2015-10-08;修回日期:2015-11-20;编辑:蒋艳
基金项目:中国地质调查局地质矿产调查项目“艇载航磁勘查系统示范应用与推广”(12120113090700)
作者简介:冯自成(1983—),男,工程师,硕士,地质勘查、航空物探专业,主要从事地质勘查与航空物探方面的工作,E-mail: 171862914@qq.com
中图分类号:P628+.5; P631.2+22
文献标识码:A
文章编号:1674-3636(2016)02-0259-06
猜你喜欢
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
水泵技术(2021年3期)2021-08-14
物联网技术(2016年12期)2017-01-21
科技创新与应用(2016年34期)2016-12-23
电脑知识与技术(2016年26期)2016-11-24
考试周刊(2016年75期)2016-10-12
科技视界(2016年11期)2016-05-23
当代化工研究(2016年9期)2016-03-20
中国惯性技术学报(2015年1期)2015-12-19