一阶时滞系统内模控制的优化分析
2016-07-18 05:58:25詹庄春
安徽理工大学学报(自然科学版) 2016年1期
詹庄春
(华南农业大学珠江学院,广东 广州 510900)
一阶时滞系统内模控制的优化分析
詹庄春
(华南农业大学珠江学院,广东广州510900)
摘要:基于IMC-PID原理,采取实际应用的PID模型,实现了理论算式与工程实际的结合。对不同时滞程度的一阶系统进行参数整定,确定了λ的取值范围。利用NCD解决了大量计算问题,为参数优化提供了有效途径。通过设计举例,显示出系统具有良好的控制性能。再经过一般性分析,得出了内模控制的一般规律,以供工程设计参考。
关键词:一阶时滞;IMC-PID;NCD;参数整定
一阶时滞系统普遍存在于过程控制当中,对于时滞程度较大的系统,单纯采用经典PID控制,其参数很难整定;最经典的控制方式有Simth预估控制法,但该方法对模型误差和滞后时间较敏感,而系统的动态过程和干扰使被控对象的实际模型很难精确。1982年,文献[1]提出的内模控制(Internal Model Control,IMC),继承了Simth预估法的优点,并对模型失配有一定的鲁棒性,经过多年的发展,理论比较成熟,出现了针对PID控制器设计的IMC-PID方法,且得到了广泛应用,例如:基于分数阶IMC-PID的锅炉蒸汽温度控制[2]。PID参数整定方法很多,对存在时变特性和严重不确定性的系统,采用ISTE最优参数整定法和鲁棒PID参数整定法较好[3],一般时滞系统可采用ISTE准则。非线性控制器优化设计(NCD)模块基于ITSE准则,采用单纯形法寻优,具有良好的收敛性[4]30。本文考虑理论的实际应用,从IMC-PID基本原理出发,充分利用参数优化软件的强大计算功能,建立起一阶时滞系统控制模型,并进行深入分析和研究。
1PID控制器模型设计
传统反馈控制系统即PID控制系统,是由比例(P)、积分(I)和微分(D)三部分组成的。在模拟控制系统中,理想PID的数学模型为
(1)
式中:e为偏差;kp,ki,kd均为系数;u(t)为PID校正输出。
由于理想PID控制器存在以下不足:①其阶跃响应曲线初始值趋向无穷大,不利于实际应用;②在实践中,纯微分环节无法物理实现,并容易引入高频干扰;③积分会增大超调量,不利于系统稳定。故应采取必要措施[5],如在积分环节后增加饱和限幅器,采取在反馈通道中加积分的方式构成准微分环节,具体设计模型如图1所示。在线性控制范围内,实际应用的PID控制器传递函数为
(2)
式中:s为拉氏算子;GPID(s)为PID控制器传递函数;kf为小于kd的系数。

图1 PID控制器的设计模型
2IMC-PID控制器参数的扩展整定
内模控制(IMC)的设计思路是将对象模型与实际对象并联,而将内模控制器逼近对象模型的动态逆,在此基础上,文献[6]则对内模控制规律的算法进行了扩展。内模控制与传统反馈控制(即PID控制)的关系如图2所示,再考虑干扰,由图2可得等效内模控制结构(见图3)[7]。其中,P(s)为对象传递函数,M(s)为对象模型传递函数,C(s)为传统反馈控制器传递函数,IMC(s)为内模控制器传递函数。当M(s)=P(s)时,称模型匹配,否则为模型失配。

图2 内模控制与传统反馈控制的关系
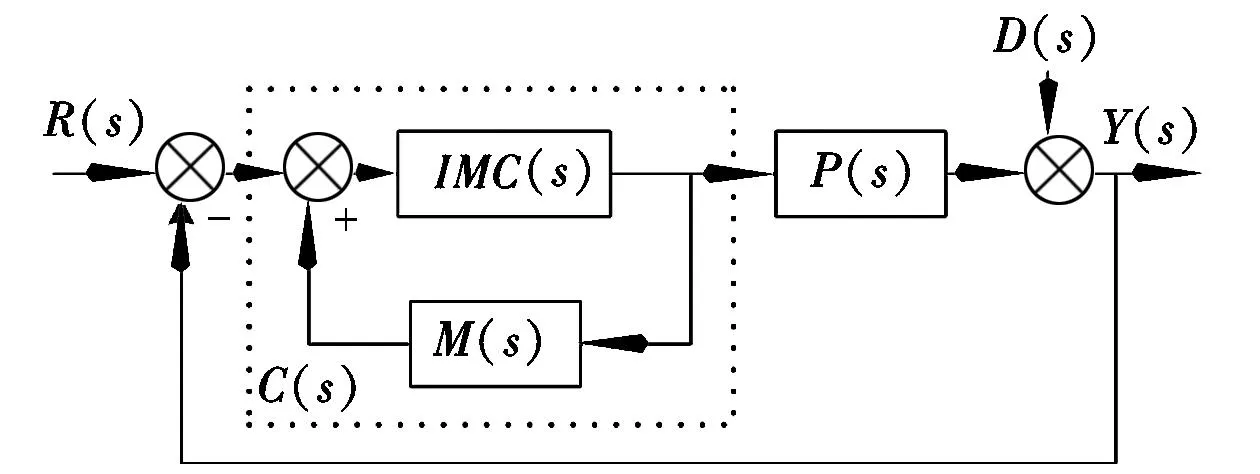
图3 等效的内模控制系统结构图
首先,根据内模原理及其扩展,有
M(s)=M+(s)·M-(s)
(3)
式中:M+(s)为包含s右半平面所有零极点和纯滞后环节的部分,剩下部分为M-(s)。
(4)
式中:f为低通滤波器。
其滤波系数的整定应考虑在系统鲁棒稳定性和性能指标ISE之间合理协调[8],采取方式为

(5)
式中:l(ω)为模型失配引入的误差;lm(ω)为模型失配引入的误差上限。
参见图3,结合式(3)和式(4),可得
(6)
(7)
将之代入式(6),可得:
(8)
将式(2)与式(8)比较,可得
(9)
其次,理论分析系统控制性能,其输出响应为
(10)
从式(10)中的第一项可看出:系统输出可以无静差跟踪给定输入,从后一项可看出:系统拟制干扰的能力较强,进一步还可认识到系统控制性能只与λ的选取有关。
最后,整定参数归结为一个λ,由此决定系统的静动态性能。
3确定λ的取值范围
λ的取值应考虑以下几点:①让内模控制模型逼近对象模型的动态逆;②要求控制系统具有鲁棒稳定性;③PID控制器的参数调节限制;④系统对上升时间、 超调量以及调节时间等动态性能的要求。
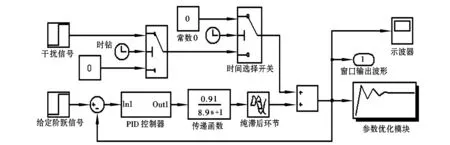
其中第2点需满足式(5),即λ取的足够大。第3点要求kf Kλ3+2Kτλ2+(Kτ2+0.5τ2-Tτ)λ (11) 取K=1,T=10,分别取τ=1,2.5,5,10,15,25, 其单位视具体控制系统而定, 计算λ满足式(11),数据关系如表1所示。 表1 λ/τ与τ/T之间的关系 表1中,τ/T表示时滞大小的参数,λ/τ则是决定闭环系统响应曲线形状的参数[9],其推荐值大于0.25[10]。表1中数据显示:当时滞程度加剧,系统将很难控制,考虑到模型可能不匹配,时滞程度应该更小。 第1点和第4点对系统控制提出了动态性能的要求,为之选择一个既能反映动态性能又包含稳定特性的性能指标是比较合理的,即时间乘误差平方的积分。 (12) 该指标称为ITSE准则,反映了控制系统的快速性和精确性。具体算法必须在所给定动态要求的前提下,选择合适的λ使J最小。其计算量极大,需借助计算机编制程序来完成,此过程即为文献[4]30中提到的参数自寻最优。 4NCD模块集的引入 在Matlab/Simulink工具库中的非线性控制设计模块集NCD(Nonlinear Control Design Blockset),具有基于图形界面的模块形式,为非线性系统的控制器优化设计和仿真提供了有效的手段。在不同MATLAB版本中,NCD模块集名称不一样:NCD Outport(MATLAB6.5)、Signal Constraint(MATLAB7.5)以及Check Step Response Characteristics(MATLAB7.13)等,但其主要特点均有[11]:①模块可添加到仿真图中,对与其相连接信号进行约束,即自动将系统时域性能指标转化为一个约束优化问题;②提供时域性能优化窗口,动态显示优化效果;③用户可任意选择优化参数;④输出显示参数优化值。 通过上述可看出,NCD的引入为滤波系数λ的进一步优化创造了极好条件,其具体应用将结合仿真设计并作介绍。 5仿真设计与分析 举例:某电烤箱系统的开环传递函数为 (13) 采用PID控制器构成单位反馈系统。现通过调节PID参数,要求系统达到如下目标:稳态无静差、具有鲁棒稳定性、超调量小于5%、上升时间小于10 s、调节时间(1%)小于30 s。 第一步,构建该系统的仿真模型(见图4)。被控对象由最小相位系统加纯滞后环节构成,干扰信号采用时间选择开关实现,参数优化模块与输出端直接相连。 图4 某电烤箱系统的仿真设计模型 图4中,纯滞后时间设置为2.76,给定阶跃信号为10,干扰信号为1,时间选择开关分别设置为60和60.5;PID参数依据式(9)设置,限幅值足够大,约为20;仿真时间为[0,100],求解器为ode45。 1) 输入K=1.0,τ=2.50,T=10.0,λ=0.63,模型失配,进行仿真; 2) 输入K=0.91,τ=2.76,T=8.9,λ=0.63,模型匹配,也进行仿真。 系统输出响应如图5中曲线1和曲线2所示,模型匹配时的系统性能较好,两者均有较强的鲁棒稳定性,但超调量都较大。 第二步,参数λ的优化。参数优化模块设置为Final value:10,Rise time:10,Setting time:30,% Setting:1,% Overshoot:5,以及添加优化参数λ。优化结果为 1) 当输入K=1.0,τ=2.50,T=10.0,λ=0.63时,优化输出λ=1.543 7; 2) 当输入K=0.91,τ=2.76,T=8.9,λ=0.63时,优化输出λ=1.301 2 优化后的系统输出响应如图4中的曲线3和曲线5所示。另外,更改各个干扰脉冲时间设置,以利于曲线分辨。在图5中,针对同一被控对象,在同一目标要求下,优化后的曲线并不重合。进一步,当输入对象模型参数也一样,只改变λ初值,通过试验可知λ优化解不相等,这就是所谓的“局部优化”问题[12]。 t/s1. 模型失配优化前;2. 模型匹配优化前;3. 模型失配优化后;4. 2. 模型匹配优化后图5 某电烤箱系统的仿真输出响应曲线 第三步,一阶时滞系统IMC-PID控制的一般性分析。设模型匹配,要求在不同时滞程度下,重点考察系统临界无超调时的λ值和系统临界稳定时的K值。计算λ时可借助优化软件,其模块设置为Final value:10,% Setting:0.001,% Overshoot:0.002,% Undershoot:0.002。计算K值的步长选择0.001,两者计算数据如表2所示。 表2 系统临界无超调时的λ值和系统临界稳定时的K值 从表2可看出,被控对象增益越大,对控制稳定性有利,但调节时间会越长。而且,还得出以下新的结论:①随着时滞程度加剧,调节λ将越大,当时滞程度大于0.5时,采用IMC-PID控制方式不再理想;②当时滞程度达2.5以后,系统的单调性不可调,IMC-PID控制不再适用。 6结束语 通过设计举例获取一阶时滞系统内模控制的输出曲线,以此验证了IMC-PID的良好控制性能。为有利于IMC-PID在一阶时滞系统中得到很好地应用,又对其进行一般性分析,确定了IMC-PID在一阶时滞系统中的适用范围,并将仿真实验数据列表,以供工程设计参考。另外,若模型失配,则一味地依靠优化来确定λ是不可取的;针对“局部优化”问题,目前提出了一种基于最大灵敏度的二自由度IMC-PID控制器参数整定方法[13],但是在快速性控制要求方面有待比较。尚待进一步研究的还有:失配度对系统控制性能的影响以及如何通过失配度不断逼近实际对象的问题。 参考文献: [1]GARICIA C E, MORARI M. Internal model control 1: a unifying review and some new results[J]. Ind Eng Chem Proc Des Dev,1982, 21(2):308-323. [2]王松, 张金环, 王晓燕, 等. 基于分数阶IMC-PID的锅炉蒸汽温度控制[J]. 华北电力大学学报(自然科学版),2014, 41(3): 70-75. [3]邱丽, 曾贵娥, 朱学峰, 等. 几种PID控制器参数整定方法的比较研究[J]. 自动化技术与应用,2005, 24(11): 28-31. [4]李华. 基于MATLAB环境下控制系统参数的优化设计[J]. 电气传动自动化,2002, 24(2): 29-30. [5]王福永. 非线性系统PID控制器的优化设计[J]. 苏州大学学报(工科版), 2005, 25(1): 56-59. [6]陈积玉, 何衍庆, 俞金寿. 基于内模控制原理的反馈控制器的整定[J]. 华东理工大学学报,1994, 20(5): 641-647. [7]尹先斌, 周有训. 基于Taylor和Pade能逼近的滞后系统MC-PID研究[J]. 昆明理工大学学报(理工版),2006, 31(2): 76-81. [8]龚剑平,朱凤成. IMC-PID控制器参数扩展整定方法的改进[J].北京化工大学学报,2000,27(3):75-76. [9]龚晓峰, 高衿畅, 周春晖. 时滞系统PID控制器内模整定方法的扩展[J]. 控制与决策, 1998, 13(4): 337-341. [10]RIVERA D E, MORARI M, SKOGESTAD S. Internal model control 4: PID controller design[J]. Ind Eng Chem Pro Des Dev, 1986, 25:252-265. [11]滕青芳. 基于NCD工具箱的非线性系统PID控制器优化设计[J]. 电气传动自动化,2002, 24(3): 32-34. [12]唐志航, 虞金有, 俞立. 基于MATLAB环境下模糊控制参数的优化设计与仿真[J]. 计算机仿真, 2003, 20(9): 101-102. [13]孙功武, 聂红伟, 苏义鑫,等. 时滞系统的二自由度IMC-PID控制研究[J]. 计算机应用研究, 2014, 31(8): 2 357-2 360. (责任编辑:何学华,吴晓红) Optimal Analysis of IMC for FOPTD systems ZHAN Zhuang-chun (Zhujiang Institute, South China Agricultural University, Guangzhou Guangdong 510900, China) Abstract:Based on the IMC-PID principle, by using the practical PID model, the combination of theoretical calculation and practical engineering was realized. Through the different degree of first order delay system parameter setting, the value range of lambda is determined. By utilizing the NCD, a large amount of calculation can be performed, which provides an effective way for the parameter optimization. By giving a concrete example, the system showed good control performance. And after a general analysis, the general rule of the internal model control was obtained, which provides a reference to engineering design. Key words:first-order plus dead-time; IMC-PID; NCD; parameter setting 收稿日期:2015-05-25 作者简介:詹庄春(1978-),男,江西鄱阳人,讲师,硕士,研究方向:电气自动化。 中图分类号:TP214 文献标志码:A 文章编号:1672-1098(2016)01-0070-05