基于六轴飞行器盘煤系统的研究
2016-07-14 07:52邢亚飞
综合智慧能源 2016年5期
邢亚飞
(湖南华电长沙发电有限公司,长沙 410000)
基于六轴飞行器盘煤系统的研究
邢亚飞
(湖南华电长沙发电有限公司,长沙410000)
摘要:六轴飞行器盘煤系统是一种新型的盘煤系统,介绍了该系统的原理、组成和功能,通过实例验证并与斗轮机数据进行了对比,证明该系统应用于火电厂盘煤可大幅节省时间,降低生产成本,减轻劳动强度,实现盘煤工作的自动化、信息化,弥补了旧式盘煤方法的不足。
关键词:六轴飞行器;盘煤;航线设定;GPS/北斗定位;激光盘煤仪
0引言
煤耗是核算火电厂发电成本的一个重要指标[1],为了及时、准确核算火电厂的发电成本,需要定期盘点煤场燃煤储量,以便了解当前煤耗。
传统的盘煤方法主要是人工盘煤,该方法利用推土机将煤堆先进行压实整形,然后安排人员利用皮尺对整形后的煤场煤堆进行人工丈量,根据经验公式估算煤堆体积,进而得出煤场当前的燃煤储量。这种传统盘煤方法,人为因素误差大,不够准确,而且耗费大量人力、财力和时间[2]。现行的盘煤方法还有斗轮机式激光盘煤仪[3-5]。这种方法较人工盘煤先进,可以节省不少人力,但由于该盘煤仪是固定式的,而且煤堆形状也不尽相同,用斗轮机激光盘煤仪进行盘煤时容易产生死角、盲区,易造成煤场、煤堆形状误判,计算体积时不够精确。而且斗轮机属于大型机械,每次开启都耗费大量电力,行动不灵敏,盘煤耗时也比较长,既不经济,也不实惠。
基于六轴飞行器的新型盘煤系统,能够很好地解决上述问题。该盘煤方法是火电厂实现快速盘煤的一种理想方法, 可为火电厂核算发电成本提供科学、准确、客观的依据, 提高火电厂燃煤管理水平。
1整体功能简述
该系统以机电一体化思想为核心,以无人机为载体,依靠差分全球定位系统(GPS)进行准确定位,通过陀螺仪惯性导航系统完成自主导航,凭借激光测距技术实现相对距离的准确测定,最后综合位置、距离数据拟合出煤堆的轮廓曲面,通过积分求得煤堆体积。
该系统是传感器技术、微机电系统控制技术、机械电子技术、计算机技术、材料学和仿生学的融合,以无人机测绘的方式更加科学地完成了盘煤工作,充分弥补了旧式盘煤方法的不足。
该系统由六轴飞行器、盘煤装置以及计算控制终端共同组成,通过操作人员设定好系统的相关参数,可以实现火电厂煤场燃煤储量的盘点工作,将煤场盘煤工作变得更加自动化、信息化。
初次使用该系统时,通过控制终端给六轴飞行器设定飞行航线,飞行器按照给定航线绕煤场飞行,开展盘煤工作。盘煤完成后,飞行器自动飞回起飞点,自动降落。整个盘煤过程经一键启动后,无需人为干预,可以自动实现起飞、盘煤、降落等任务,完全实现自动化。盘煤完成后,计算终端对盘煤数据进行分析计算,将盘煤结果输出,在显示屏上显示出煤场煤堆的三维图形以及当前煤场燃煤储量。图1为六轴飞行器盘煤系统结构示意图。
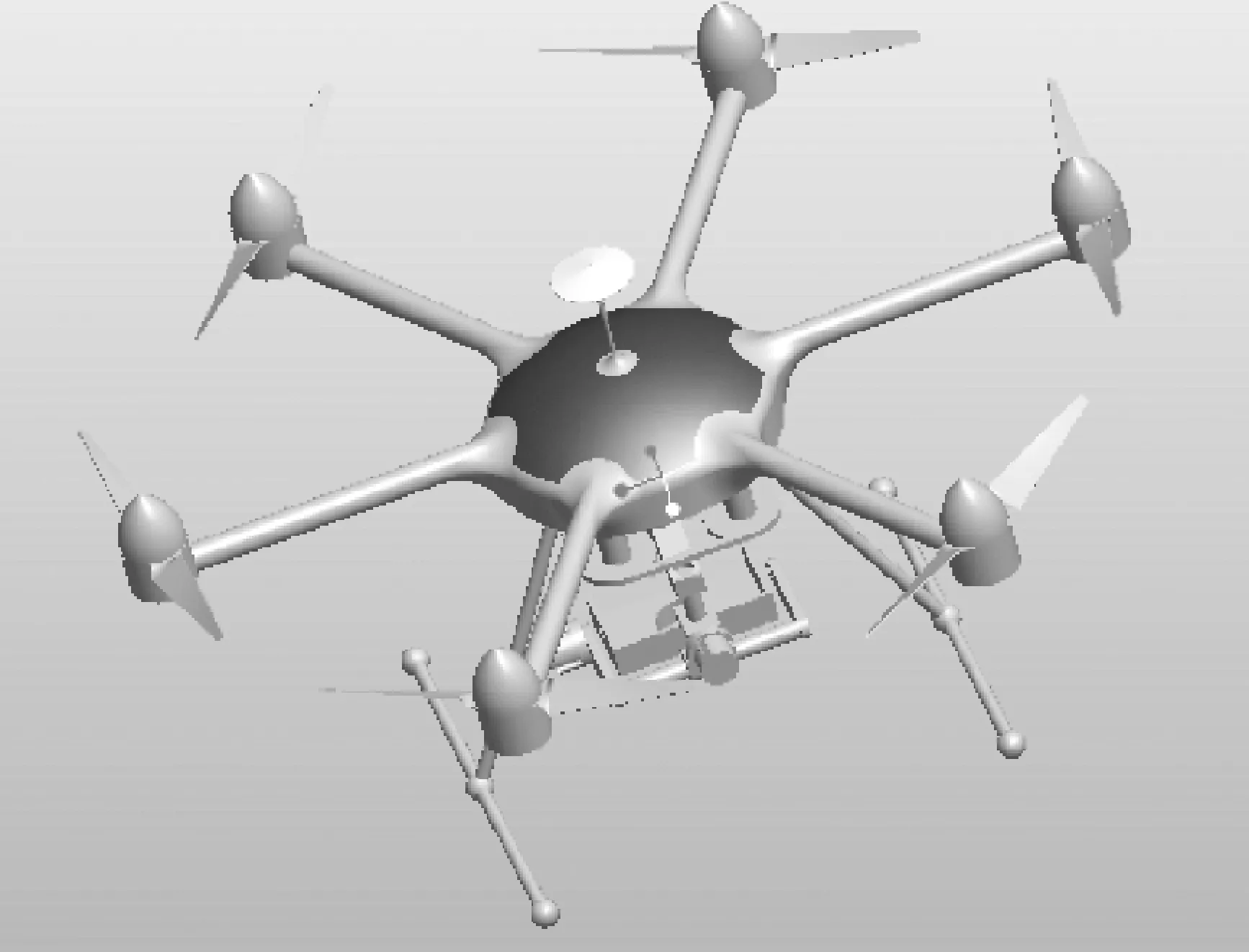
图1 盘煤系统结构示意
2六轴飞行器盘煤系统的组成及工作原理
该系统是以六轴飞行器为平台[6],上面搭载盘煤装置,由计算控制终端进行控制计算的一套完整系统,各个部分环环相扣,有机结合,共同完成盘煤工作。
2.1六轴飞行器
无人飞行器越来越成为科研人员的研究热点,上面搭载不同种类的传感器,可以进行相应的科研试验和替代人类完成一些困难、复杂,甚至危险的任务。尤其是多旋翼无人飞行器结构并不复杂,操作简单、灵活,对起飞和降落场地要求不高,可以垂直起飞和降落,还可实现定点、定高、定时巡航,能够很好地适应复杂地形条件[6]。
本设计中采用了多旋翼飞行器中的六旋翼飞行器,即六轴飞行器。一般来说飞行器的轴数越多,承载量越大,与四轴飞行器相比[7],六轴飞行器具有更大的载重量,而且六轴飞行器在某个轴出现故障时,通过控制器的调节还能继续飞行,从而避免飞行器发生事故而损坏上面搭载的贵重仪器、仪表,减少经济损失。而四轴飞行器则不同,如果某个轴出现故障,它将不能保持平衡,很可能发生坠机事故。本设计采用的六轴飞行器结构如图2所示。
六轴飞行器有如下优势:(1)飞行载重能力大,可以搭载更多的仪器设备;(2)可以折叠,携带方便,所占空间不大;(3)飞行平稳,飞行精确度高;(4)能够实现定点悬浮、定高飞行;(5)抗干扰能力强,可以在五六级大风中按照所设航线平稳飞行;(6)可以实现自动起飞,完成任务后可自动返航,整个过程无需人为干预;(7)采用6S型22 000 mA电池作为电源,电池容量大,续航能力持久,工作时间更长,能够支持飞行器完成整个盘煤工作。
六轴飞行器的飞行原理:六轴飞行器通过调节6个无刷电机的转速来改变其螺旋桨转动速度,通过速度变化实现升力变化,进而控制飞行器的位姿和飞行航线。六轴飞行器采用6个与中心距离相等的固定倾角旋翼,它们的位置呈中心对称。对角的一对电机产生相同的升力和相反的扭矩,可以使力矩达到平衡。6个无刷电机中,3个无刷电机逆时针旋转,另外3个无刷电机顺时针旋转,可以使飞行器平衡飞行时竖直方向上的空气动力扭矩效应达到平衡,不会使飞行器绕其中心旋转,从而保证六轴航向的稳定。
2.2盘煤装置
要完成高空定点测量计算煤堆体积,需要多个关键模块配合工作。首先,设计以六轴飞行器作为载体,搭载其余模块进行高空作业。其次,在测量过程中,需要获取飞行器的位置数据,因此需要使用GPS定位装置。当飞行器到达定点位置后,需要向下测量煤堆高度,因此需要使用测距传感器。即六轴飞行器上搭载的盘煤装置由激光盘煤仪、GPS/北斗双模定位系统及高度计、微机控制中心及数据储存卡组成。各个模块在微机控制中心的控制下协调有序地运行,共同完成盘煤任务。
2.2.1激光盘煤仪的工作原理
本研究采用的激光盘煤仪使用一个用来测量距离的激光雷达,用以反映发射点到反射点的直线距离[8]。在火电厂煤场盘煤时,结合激光盘煤仪的位置和高度信息,可测量出煤场煤堆的三维坐标。该激光盘煤仪的具体参数: 电源, (12±1.2) V (消耗电流最大值1.0 A,典型值0.7 A);激光光源,半导体激光二极管(λ=785 nm),激光安全等级1(FDA);测量距离,0.1~30.0 m(最大值60.0 m);精度,±30 mm;角度分辨率,0.25°(360°/1 440);扫描时间,每25 ms扫描一次;噪音,<25 dB;接口,USB 2.0(全速);同步输出,NPN开集电极;指令系统,专用指令SCIP2.0;正常工作环境温度,-10~+50 ℃;振动,双振幅1.5 mm ,频率10~55 Hz;质量,约370 g(包括电缆)。
本设计中激光盘煤仪的工作原理:由主控芯片发出扫描指令,激光盘煤仪收到指令后发出测距激光,同时启动激光仪内部计时器开始计时,启动接收设备接收反射信号,接收到激光发反射信号后停止计时[9];通过距离公式s=vt(式中:s为距离;v为激光的速度;t为发射信号输出到反射信号收到的时间间隔)可计算出煤堆上某点到激光盘煤仪的距离,然后激光盘煤仪内部处理器将测量数据按SCIP Ver.2.0协议进行调制后发送到主控处理器。具体工作流程如图3所示。
2.2.2GPS/北斗双模定位系统
GPS由美国国防部投资建设,是一种具有全方位、全天候、全时段、高精度的卫星导航系统,能为全球用户提供低成本、高精度的三维位置、速度和精确定时等导航信息,它极大地提高了地球社会的信息化水平,有力地推动了数字经济的发展。同美国GPS和俄罗斯(GLONAS)系统一样,北斗卫星导航系统(以下简称北斗系统)设计的目标也是致力于在全球范围内向用户提供全天候的定位、导航和授时服务,并将拥有更高的精度和更强的可靠性,而且北斗系统的短报文通信能力能够在没有手机信号的地方代替手机短信功能,主动将用户的位置信息发送出去[10]。
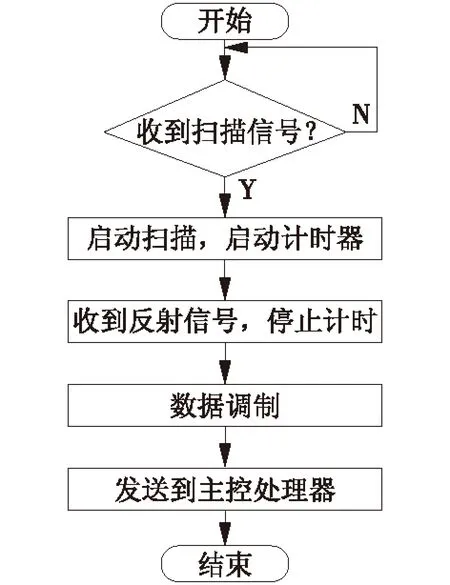
图3 盘煤仪工作流程
本设计采用的GPS/北斗双模定位系统[11],就是利用两者的优势,准确定位,用来实现飞行器的位置控制,可以做到经纬度定位、精确悬停、定轨巡航。在飞行器飞行过程中,该定位系统向整个系统提供经纬度信息,一是用来进行飞行器导航,二是向盘煤装置的主控芯片提供被测点的经纬度信息。具体工作流程如图4所示。

图4北斗双模定位系统工作流程
2.2.3高度计
本设计采用的高度计分辨率可达到分米级,精确度极高,是一个较好的高度反馈传感器。一般来说,垂直方向上的大气压是随着高度的变化而变化的。它的工作原理是:通过测量大气压的变化,从而得知高度的变化。它在盘煤过程中向控制器反馈当前的高度信息,一是向飞控反馈高度信息,用以保持飞行器实现定高飞行;二是向盘煤装置的主控芯片提供被测点的高度信息。高度计具体工作流程如图5所示。
2.2.4微机控制中心及数据储存卡
微机控制中心是整个盘煤系统的主控中心,它协调各个模块有序运行,向各个模块发出控制指令并处理各个模块系统发送过来的数据信息,数据存储卡则用来存储盘煤数据。微机控制中心的结构框图如图6所示。

图6 微机控制中心结构框图

图5高度计工作流程
2.3计算控制终端
本设计的计算控制终端用来设定飞行器的相关参数,以及进行盘煤数据后处理的相关计算。初次使用六轴飞行器盘煤系统时,需要给飞行器设置一些相关参数,包括飞行高度、姿态矫正、飞行速度等,以及设定飞行航线,以实现自动盘煤,节省人力。其控制界面如图7所示。

图7 计算控制终端界面
盘煤工作结束后,需要对数据存储卡中的数据进行处理。计算控制终端读取数据,首先将数据按一定协议进行解调,将数据解调成相应位置、距离等信息,然后将这些数据插值拟合,生成三维曲面图,还原煤场煤堆图,利用微元法积分求得煤堆的体积,然后根据公式m = ρV(式中:m为质量;ρ为煤堆的密度;V为所测量得到的体积)计算得到煤场燃煤的质量。
2.4实测数据
为了进一步验证系统的实用性和可靠性,选择在湖南华电长沙发电有限公司进行实地检测,并获得了真实、可靠的检测监测数据,将收集到的数据解调,插值拟合后可得三维曲面图。接下来对收集到的数据进行进一步处理,利用微元法积分[12]求得煤堆的体积,得到煤堆体积的详细数据,如图8所示。
为了进一步验证检测的准确性,又进行了几组对比试验,并将实验数据和电厂现有的斗轮机数据进行对比,具体见表1(表1中,测量体积为基于六轴飞行器盘煤系统所测体积,差值为该系统所测体积与斗轮机所测体积的差值)。经过实地检测和数据对比,六轴飞行器盘煤系统工作稳定、可靠,测量数据翔实、准确,相比于斗轮机存在扫描盲区的问题,测试性能好,在火电厂存煤监测工作中有进一步研究推广的实用价值。

图8 盘煤软件工作界面

测量测量体积/万m3差值/万m3相对偏差/%18.2105-0.32023.7528.2541-0.27663.2438.0980-0.43275.07平均8.1875-0.34324.02
3结束语
基于六轴飞行器的盘煤系统应用于火电厂煤场燃煤的盘点工作,简单灵活,操作便利,可大大节省盘煤时间,节省人力成本,可以为火电厂创造更大的效益。目前,火电厂很多煤场都在进行“数字化煤场”建设,将基于六轴飞行器的盘煤系统应用到盘煤工作中,可大大推进数字化煤场的建设,全面提高火电厂的自动化与信息化水平。同时,本研究设计的六轴盘煤系统的应用不仅仅局限火电厂盘煤工作,还可应用于农业上粮堆、矿业中矿堆、砂石土方等堆积物的测量,适用范围广,可解决多种堆积物测量问题,是一种十分有前景的堆积物测量方法。
参考文献:
[1]曹长剑.煤场盘煤系统研究与设计[D].西安:西安工业大学,2011.
[2]刘艳玲,刘海烨,秦健.露天煤场自动盘煤方法的研究[J].制造业自动化,2011,33(14):93-96.
[3]张波,刘春雷,刘琴,等.激光盘煤技术在火电厂储煤场管理中的应用[J].激光杂志,2014(5):53-55,58.
[4]范会敏,曹长剑.一种实用的激光盘煤系统设计[J].工业仪表与自动化装置,2011(1):57-59.
[5]蒋宁.激光主动测距法在盘煤系统中的应用[J].装备制造技术,2014(8):81-82.
[6]刘羽峰,宁媛.六轴旋翼碟形飞行器控制系统软件设计及仿真研究[J].计算机测量与控制,2011,19(5):1208-1211.
[7]宫琛.四轴飞行器的研究与设计[D].淮南:安徽理工大学,2015.
[8]姬广勤,王喜全,李兴华,等.激光自动盘煤系统[J].中国电力,2000, 33,(2):72-73.
[9]范海英.三维激光扫描系统的应用研究[J].辽宁科技学院学报,2009,11(2):34-35.
[10]郭桂川.北斗卫星导航系统在工程测量中的研究与应用[J].城市勘测, 2015(1):93-96.
[11]李亚飞.北斗/GPS双模定位关键技术研究[D].北京:中国地质大学(北京),2014.
[12]吕效国,陈康康.关于积分微元法的注记[J].科技资讯,2006(19):233.
(本文责编:白银雷)
收稿日期:2016-02-15;修回日期:2016-05-02
中图分类号:TP216
文献标志码:B
文章编号:1674-1951(2016)05-0004-04
作者简介:
邢亚飞(1986—),男,河北任丘人,助理工程师,从事标准化实验室技术和煤炭市场调研方面的工作(E-mail:xingyafeincepe@163.com)。