移动机器人路径跟踪的智能控制设计分析
2016-07-10 08:07唐亦敏
电子技术与软件工程 2016年8期
摘 要:由于移动式机器人不完全属于约束系统,成为其自动化的领域重要研究内容,并且路径跟踪在智能化方面的控制更是其移动式机器人关键技术。因此,研究与分析路径跟踪实现智能化控制具有一定现实意义。文章该领域的研究基础上分析了移动式机器人实现路径跟踪的智能化控制重要设计,运用先进的算法控制路径在跟踪时的速度、转向等。
【关键词】移动 机器人 路径跟踪 智能控制 设计 分析
伴随人工智能、计算机等技术在各领域中高速发展,逐渐完善了机器人内部的控制系统,仿真人的智能化系统是机器人在控制系统方面发展的重点方向。分析其路径跟踪的控制设计,主要还是为了在未来发展中更加智能化的操纵移动式机器人。移动式机器人在实现智能化控制时,运用“模糊”控制器进而实现了路径跟踪的控制目标。
1 移动式机器人智能化控制器的基本设计原理
1.1 模糊控制器
该系统的核心部分为“模糊”控制器,有三个主要部分组成,它实现控制主要是利用计算机的程序逐一实现,首先求出系统的给定值、反馈值存在的误差值e,再计算出误差的变化率ec,即 de /dt对误差进行积分,其次模糊化输入量,相继求出控制规则(R),最后是模糊的推理与判决。
1.2 视线导航器
通过运用计算的航向和视线角产生的误差,将其作为“闭环反馈”的控制量,它能够决定角速度,然而前进的速度由路面在前方具有的曲直程度与角度间存在的误差所决定。将移动式机器人的当前位置至待跟踪的轨迹线上垂足视为初始的期望点,在其基础之上权衡视线的距离,能够节省在路径行驶中的能耗,在实现提前控制中,令跟踪控制提升了智能性能。
2 移动式机器人的前进速度FPGA实现
采用“FPGA”有效减少了使用分立元器件的数量,它包含接口电路和逻辑电路,但逻辑电路主要集成在FPGA内。该控制器主要是内部结构,包括了数据接口、编码、算术的逻辑运算、脉冲发生以及换向、状态控制、时钟、数据的锁存器以及计数器等。其工作原理是控制系统在上电以后,它的“数据接口”电路依照移动式机器人目前运行的状态,进而读取出外部(I/O)相关数据类信息,进而将其送入至编码的电路中完成编码,再送往算术的“逻辑运算”电路,此电路能把给定出、采集或处理以后的图像对其特征值展开算术逻辑的运算,明确脉冲发出的有效数量。同时,启动脉冲的发生以及换向的电路,进而产生一些控制类型的信号,驱动系统电机的工作,以此实现了控制前进速度的目标。控制速度的系统运用了伺服直流式电机,不断改变着加供电电压以及机身转速。其“PWM” 信号的产生器主要由锯齿波类型的发生器、比较器等组成,最终输出逻辑信号。在“FPGA”的内部,其锯齿波类型的信号采用“非溢出”处理方式由“二进制计数器”的记数码实现模拟。因而,通过比较脉宽信号计数码很快实现了PWM信号的输出目标,其平均电压=(t0/T)U=βU,β影响着电压值、前进速度的变化。
在仿真实验中,若果移动式机器人将目标速度设置为16厘米每秒,“FPGA”的控制器可通过改变其占空比β大小,进而调整该伺服直流式电机内部电压值,令实际速度更加接近于目标速度。在实际速度<目标速度情况下,增大占空比就会增加电机内部电压值,令实际速度更接近目标速度;在实际速度>目标速度情况下,减小占空比则电机内部电压也相应减小,同样达到了实际速度接近目标速度的控制目的。
3 运用“GPSO”算法实现了移动式机器人的转向控制
3.1 改进“PSO”算法的原理
为了提升“GPSO”算法的精准性,对该算法进行了改进,主要优化“PID”控制器内三个重要参数Kp、Ki、Kd,实现了移动式机器人控制路径跟踪基本转向。由于标准化的“PSO”算法在其运行中具有较快的收敛初始速度,所以无明显的变异影响。要想降低由于变异操作而影响其算法的稳定性程度,就要选择合理性的杂交概率(P)。如果P较大,其微粒群就会长期处于“停滞”的状态,进而削弱其变异算子整体的作用。如果P较小,就会忽略具有有潜力的微粒飞行。通过多次研究试验,P通常选择0.01值。 为了进一步获取到“杂交操作”计算的公式,将a、b 设为父代微粒,其公式为:
Xa(t+1)=p·Xa(t)+(1-p)·Xb(t)
Xb(t+1)=p·Xb(t)+(1-p)·Xa(t)
其中0 < p< 1,旧父代的微粒在依照看上面杂交公式展开杂交操作以后,在超立方体之中形成了具有随机性的两个新位置。这不仅确保了其多样化的微粒群,还改善了其“GPSO”算法的一些缺陷。 同时,ω惯性权重系数同样在很大程度之上影响着算法自身的优越特点。若ω较小则会提高收敛的精度,若ω较大就会提升收敛的速度。
3.2 “PID”控制器的设计
由于WMR的转向系统具有复杂性以及非线性的特征,其转向较易受很多因素而影响,它的参数在系统运行中产生了持续性的变化。 把优化“GPSO”算法的理论应用在“PID”控制器中,在整定之中实现了Kp、Ki、Kd三个参数在线式的整定、优化。此方法很好的改善了常规式“PID”控制器的参数缺陷,利用仿真实验证实了此方法的正确实施性。对前轮的转角进行控制,及时调整了在方向上的偏差。比较其机器人的实际位置、预瞄点,进而计算出在方向上的偏差,将其作为此“控制器”输入变量。输出量就是转向电机的控制电压,运用电压的信号进而驱动转向的控制电机完成控制目标。
其中“GPSO”算法的参数设置:Kp、Ki、Kd的范围为(0,10)、(0,2)、(0,2),其种群的规模是30,将终止代数定为50,输出限制定在[-10,10]范围内,转向系统的传递函数渴表示为:G(s)=6627.6/(s2+269s+6627.6)
3.3 仿真实验的研究
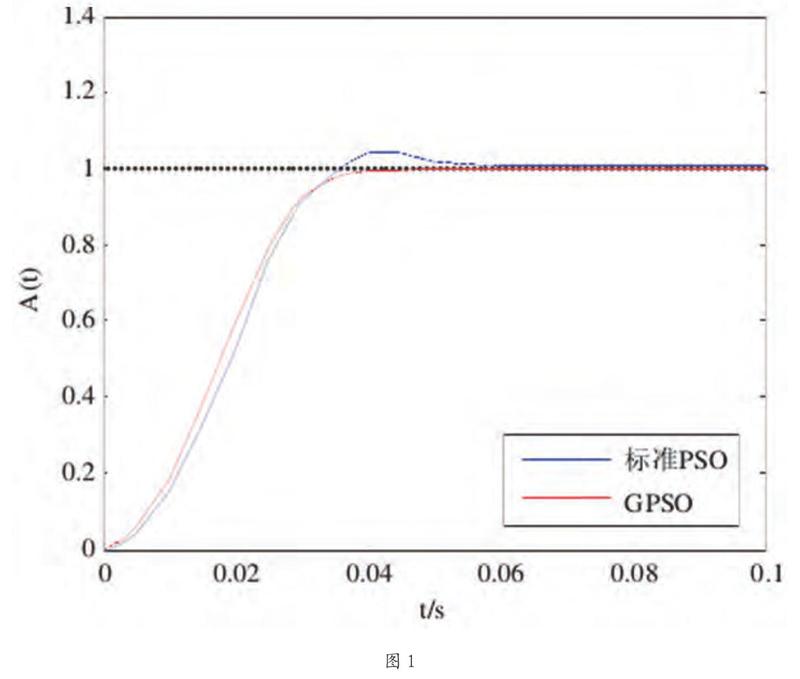
在方针实验中运用简单可视化的“MATLAB”软件,对“GPSO、PSO”算法下的机器人展开仿真是控制实验研究,验证其算法的有效性与精准性。在相同条件之下,包含群体大小或被控制的对象以及各参数函数等,标准化的“PSO”性能低于“GPSO”的算法, 基于PID的响应时间获取出(见下图),标准化的“PSO”在 0.06秒的附近能够达到系统的相关要求,进而出现了超调的现象。然而,“GPSO”的算法仅需在 0.04秒附近即可达到系统的某些要求,尤其是在速度和精准度方面,有效实现了智能化的路径跟踪的控制,如图1。
4 总结
经过分析移动式机器人智能化控制器的基本设计原理,研究了前进速度的“FPGA”实现。运用“GPSO”算法实现了转向的控制,而后运用仿真实验证实了应用方法的必要性与有效性。此方法在该领域以及其他领域都有较高应用的价值,具有良好的扩展性能,故在日后研究与发展中可适当加入局部神经网络的控制,进而实现自适应的控制,有效提升导航精准度以及减少其路径跟踪的误差。
参考文献
[1]葛雪雁,童艳,徐宁.移动机器人智能路径跟踪控制方法研究[J].制造工程设计,2010,2(54):52-55.
[2]吴才辉.移动机器人路径跟踪的智能控制[J].燕山大学工学硕士学位论文,2011,5(24):1-62.
[3]李庆中,顾伟康,叶秀清,项志宇.移动机器人路径跟踪的智能预瞄控制方法研究[J].机器人,2010,5(33):252-255.
作者简介
唐亦敏(1961-),男,江苏省苏州市人。大学本科学历。现为无锡科技职业学院中德机电学院教讲师、工程师。主要研究方向为电气与自动控制。
作者单位
无锡科技职业学院中德机电学院 江苏省无锡市 214000
猜你喜欢
新教育时代·教师版(2016年26期)2016-12-06
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14