
基于STM32的直流电机伺服控制系统
2016-07-05 19:17郑凯强赖惠鸽吴凤民
科技风 2016年18期
郑凯强 赖惠鸽 吴凤民
摘 要:本文设计了一种以STM32VET6微控制器作为控制核心的有刷直流电机伺服驱动器。系统以光电编码器为速度与位移传感器且带有电流采样电路,还具有基于PWM和H桥的电机驱动电路,并通过数字PID控制策略,实现直流电机的三环控制。实际测试表明,系统具有控制精确、稳定性好和结构简单等特点。
关键词:STM32;伺服驱动器;PID
有刷直流电机作为最早出现的电机因其结构简单性能良好得到了广泛的应用。随着对控制精度要求的提高,传统的控制方法已经无法达到控制精度的需求。本文利用STM32VET6微控制器设计了一种H桥直流电机伺服驱动器,实现了有刷直流电机的速度、位移、电流三环控制。
1 系统整体结构
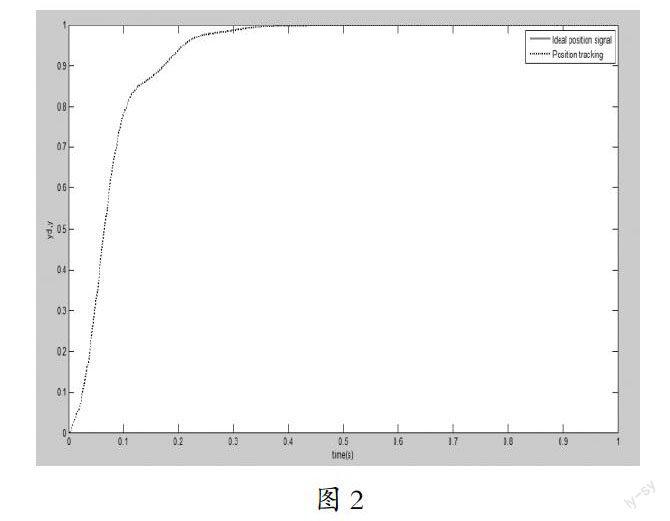
伺服驱动器采用STM32VET6微控制器为核心控制芯片,主频为72MHz,芯片内部集成USART与CAN控制器,具有2 个12 位模数转换器,8个定时器,满足采样与定时的要求,外接各类扩展模块,共同构成伺服驱动器整体。伺服驱动器整体架构图如图1所示。
2 驱动器硬件结构
驱动器的硬件结构主要分为两大部分。上板控制电路用于接收光电编码器的反馈信息运行控制算法,下板則将上板产生的PWM信号进行功率放大用于驱动电机运行。
1)通信模块。为了提高该伺服驱动器的通用性与实用性,使驱动器具有极强的扩展性能,该驱动器采用双通信方式。利用MAX232芯片进行串口通信,82C250芯片进行CAN通信,不仅使驱动器便于与PC机软件进行测试以调整控制参数优化驱动器性能,还使驱动器满足各种工业场合的使用需求。
2)电流采样模块。要实现电动机的电流环控制,则必须先对电机的电流进行采样。串电阻检测电流的电路结构清晰,成本低,实时性好,精度较高。所以本驱动器采用串电阻检测电流方式,通过STM32芯片的ADC模块读取数据,将获得的电流数据通过控制器的PID算法进行调整以达到精确的电流输出。
3)光电编码器模块。要能够达到对直流电机的位移、速度等的控制,必须要有传感器实时检测电动机的位置速度信息。光电编码器因其检测精度高,性能好,抗干扰能力强得到广泛应用。为提高检测精度,本设计采用500线的增量式光电编码器,4倍频后可以达到2000线的高分辨率,大大提高驱动器的控制精度。光电编码器将获得的信息传入STM32控制芯片,经相应程序处理后得到电动机的速度与位移,然后与设定值进行比较,经PID调节后输出调整信息。
4) H桥驱动模块。由于STM32控制芯片产生的PWM信号并不能直接驱动电机运行,而需要进行功率放大后才能带动电机运行,所以一个性能优越的功率驱动电路对提高伺服驱动器的性能大有裨益。本设计采用H桥形式的受限倍频单极性驱动可逆PWM系统,使直流电机具有正反转与制动功能,提高了驱动器的实用性。
3 驱动器软件结构
驱动器的软件结构主要分为上位机测试软件与驱动器嵌入式程序。
3.1 嵌入式程序
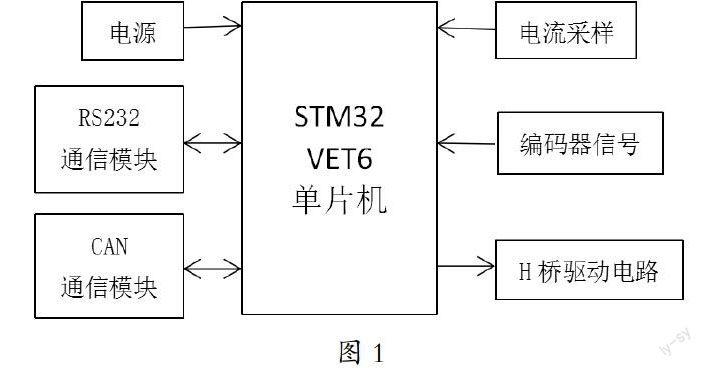
驱动器的嵌入式程序用于实现对电动机的独立控制,内含控制算法与通信协议。考虑到电动机的物理特性,这里采用增量式PID算法。增量式PID算法的仿真结果如图2所示。由仿真结果可知,增量式PID算法具有极好的响应性能。
3.2 上位机测试软件
为了便于调整驱动器的控制参数,检测驱动器的控制精度。专门开发上位机测试软件用于测试伺服驱动器的运行性能。测试软件采用C语言编写,与伺服驱动器通过串口通信可以实时获取驱动器的运行状态与向驱动器发送控制信息。
4 测试
伺服驱动器完成之后需要对其性能进行实际测试,对控制精度达不到要求的伺服驱动器要分析原因对控制参数或控制策略进行适当修改使其能达到控制需求。经实际测试后,由上位机获得的实时运行数据可知,伺服驱动器性能良好控制精度高。
5 结语
本文设计了基于STM32的直流有刷电机伺服驱动器,经实际成品的实验验证,本驱动器具有良好的性能较高的控制精度,且由于此驱动器采用串口通信与CAN通讯的双通信方式扩大了驱动器的使用范围。
参考文献:
[1] 林瑶瑶,仲崇权.伺服驱动器转速控制技术[J].电气传动,2014,03:21-26.
[2] 王毅,王平,苏伟达,郭福源,赖发春.基于数字PID控制的直流电机控制系统的设计[J].福建师范大学学报(自然科学版),2010,04:59-62.
[3] 王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.5.
[4] 姜文彪,吴坚.直流电机双闭环PI控制技术研究[J].机床与液压,2012,11:21-24.
作者简介:郑凯强(1991-),男,汉族,四川广安人,在读硕士,研究方向:机电系统智能控制。
