
基于北斗的水下上浮自动定位系统设计
2016-07-04 09:15张景卓肖大为海军工程大学理学院武汉430033海军工程大学兵器系武汉430033
船电技术 2016年6期
张景卓,肖大为,姬 庆(.海军工程大学理学院,武汉430033;.海军工程大学兵器系,武汉430033)
基于北斗的水下上浮自动定位系统设计
张景卓1,肖大为2,姬庆2
(1.海军工程大学理学院,武汉430033;2.海军工程大学兵器系,武汉430033)
摘要:针对水下测量设备上浮至水面后回收打捞时,难以准确定位易漂走丢失的情况,设计了一种基于二代北斗系统的上浮自动定位系统。该系统采用低功耗的MSP430F149单片机作为控制核心,利用北斗卫星的定位通信功能,将上浮后的测量系统位置信息发送给船载用户终端,是一种可控、低功耗、体积小的装置,可应用于各类需回收的水下测量设备。
关键词:定位北斗单片机
0 引言
利用水下设备进行水下探测一直是人类探测、认知水下环境的重要研究手段。尤其是随着陆地资源过度开采利用,各国逐渐将目光聚焦在海洋中存在的大量油、气及各种各样的矿产资源。各国都在加大对海洋资源的探测力度,海洋探测如今已成为一个蓬勃发展的研究方向。水下探测设备作为水下探测系统中的重要部分,在完成水下勘探任务后,对水下设备进行回收再利用是一个不可避免的环节。但水下探测的环境往往比较恶劣,特别是当风浪、暗涌或水流存在时,水下设备的上浮后的位置会难以确定,造成回收费时费力甚至设备丢失。此时,设计一种水下上浮定位装置对上浮后的水下设备进行准确的定位就显得尤为重要。
北斗卫星导航定位系统北斗(BEIDOU (Compass)Navigation Satellite System)是我国自主研制开发的区域性有源三维卫星定位通讯系统,是继美国的全球定位系统(GPS)、俄罗斯的GLONASS之后第三个成熟的卫星导航系统。其突出特点是卫星数目少,用户终端设备简单,能够满足对服务区提供定位、导航、授时以及简短报文通讯服务[1-3]。
本文针对水下测量设备上浮至水面后回收打捞时,难以准确定位易漂走丢失的情况,设计了一种基于二代北斗系统的上浮自动定位系统。
1 系统总体设计
1.1系统功能
基于北斗的上浮自动定位系统,简称自动定位系统,主要功能是与北斗卫星系统通讯,将所在水下设备平台在水面的经纬度位置信息发送给船载或者是其它平台上的用户终端,可以安装在水下设备内(天线部分需外露)或者外部,系统功能如图1所示。系统通过水深控制工作状态转换,当装置由海底上浮至水面后,由水压传感器检测到水压的变化,系统从待机模式切换成工作模式。此时,装置中的嵌入式北斗用户机将与北斗卫星通讯,请求定位,成功配对后进行定位并发送经纬度信息给船载北斗终端,从而实现水下设备上浮后的定位,利于设备的回收,解决了需回收的水下设备在水下工作时还需另外用缆绳连接指示浮标,且上浮后发现困难,易丢失的缺陷。

图1 水下上浮自动定位系统功能图
1.2系统组成
自动定位系统采用密封壳体,按功能模块可以将系统分为:控制模块、采集模块、通信模块、水压传感器模块、嵌入式北斗模块、天线模块、电源模块和时钟模块,组成框图如图2所示。

图2 自动定位系统组成框图
1)控制模块,为系统的核心、控制所有的程序动作,包括工作状态转换、采集水压信号、北斗定位和通信。控制模块由430单片机、电压转换芯片组成:其功能为单片机发送控制指令、接收水压传感器模块的采集的数据并进行分析,接收嵌入式北斗模块的定位信息并解算经纬度,发送经纬度信息给船载北斗终端;电压转换芯片将电源模块提供的电压转换为各个模块提供所需电压。
2)采集模块采集水压传感器的数据,将水下设备的水下深度的变化量转换成电压值。
3)通信模块由串口转换芯片提供430单片机与嵌入式北斗模块的通信协议,将单片机指令发送给嵌入式北斗模块,并回传北斗模块接收到的北斗定位信息。
4)水压传感器模块用于实时采集当前的水压。
5)嵌入式北斗模块是自动定位系统的核心,其功能为与北斗卫星进行定位和与船载北斗终端进行定位信息通信。
6)电源模块为可充电二次铅蓄电池,其功能是为系统提供所需的能源,根据控制模块的电压转换芯片对各模块的电源进行管理以节省功耗。
7)时钟模块包括高精度温控晶振,其功能是为控制模块提供高精度的时间脉冲,控制模块通过计算脉冲数确定程序运行中断。
2 硬件设计
2.1控制模块
控制模块接收电源信号供电,同时接收时钟晶振的稳定脉冲信号,对水压模块、采集模块与通信模块进行控制,调用北斗进行定位并发送信水下设备的经纬度信息。
控制模块接收水压信号传送过来的水压采样信息,判断水下设备在水中的位置是否已经上浮,判断如果属实,表明水下设备已经上浮,则控制嵌入式北斗上电,再通过通信模块与北斗卫星进行通信,发送指令信息。控制模块采用MSP430F149单片机为主体,是一种具有超低功耗特性的功能强大的单片机,能保证在水下长时间工作,控制电路如图3所示[4-6]。
如图所示,P3.5引脚与P3.4引脚分别连接通信模块进行信息传输,其中P3.5引脚读入信息,P3.4引脚发出信息。P4.0引脚与蜂鸣器电路相连,用来控制蜂鸣器发出正常或者报警信号。蜂鸣器电路作用是当北斗上电时,蜂鸣器响一声;当北斗自检不正常时,则蜂鸣器长鸣,警示通知。蜂鸣器电路采用两个阻值为100 Ω的电阻、两个10 kΩ电阻、NPN型BJT管和一个无源蜂鸣器组成,电路如图4所示。当单片机按程序运行正常时,P4.0引脚会使发射极正偏,同时满足集电极反偏,从而导通电路,使蜂鸣器鸣发声[7,8]。

图3 控制电路电路图
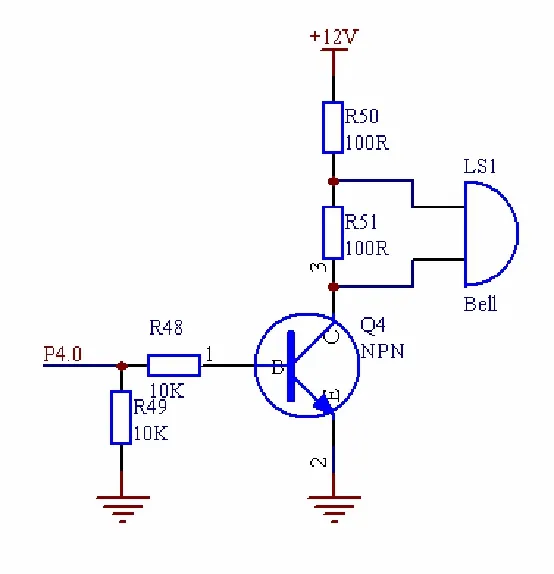
图4 蜂鸣器电路电路图
2.2水压传感器模块
水压传感器模块的作用通过水压传感器进行水压监测,同时采用A/D进行水压信号采集,判断水下设备在水中的位置是否已经上浮。一般认为当水深从大于5m的状态变化到小于5m时,认为水下设备已经上浮至水面,水压模块将指令传送到控制模块进行定位申请。本文采用85 Constant Voltage不锈钢压力传感器,它是一种微型传感器装置,实物如图5所示。传感器利用压力传感器里的硅油传递来自不锈钢隔膜的压力,其中的陶瓷基片包含Laser-trimmed电阻温度补偿和补偿校正。还有一个额外的激光可调电阻用来调整外部差分放大器提供±1%的跨度可交换性[10]。

图5 水压传感器实物图
2.3电源模块
单片机处理器MSP430的工作电源电压为1.8~3.3V,通信转换模块工作电压为3.3V,外部供电电源电压为12V。因此需要选用LT1761稳压器芯片将电源电压转换为各元器件所需的正常工作电压。AMS1117-3.3是一个正向低压降稳压器,额定输出电压为3.3V,具有1%的精度,其内部集成过热保护和限流电路。LT1761芯片共有5个引脚,其连接方式为引脚1输入,引脚5输出,引脚2接地,且输入输出端对地接滤波电容。为显示电源状态,在输出端接入LED及分压电阻,电源转换电路如图6所示[9]。

图6 电源转换电路
3 软件设计
MSP430单片机使用IAR公司的集成环境IAR Embedded Workbench嵌入式工作平台以及调试器C-SPY来编译程序并利用该软件可直接将程序通过单片机自带的JTAG接口下载之单片机FLASH存储器中,从而完成在线仿真、调试。
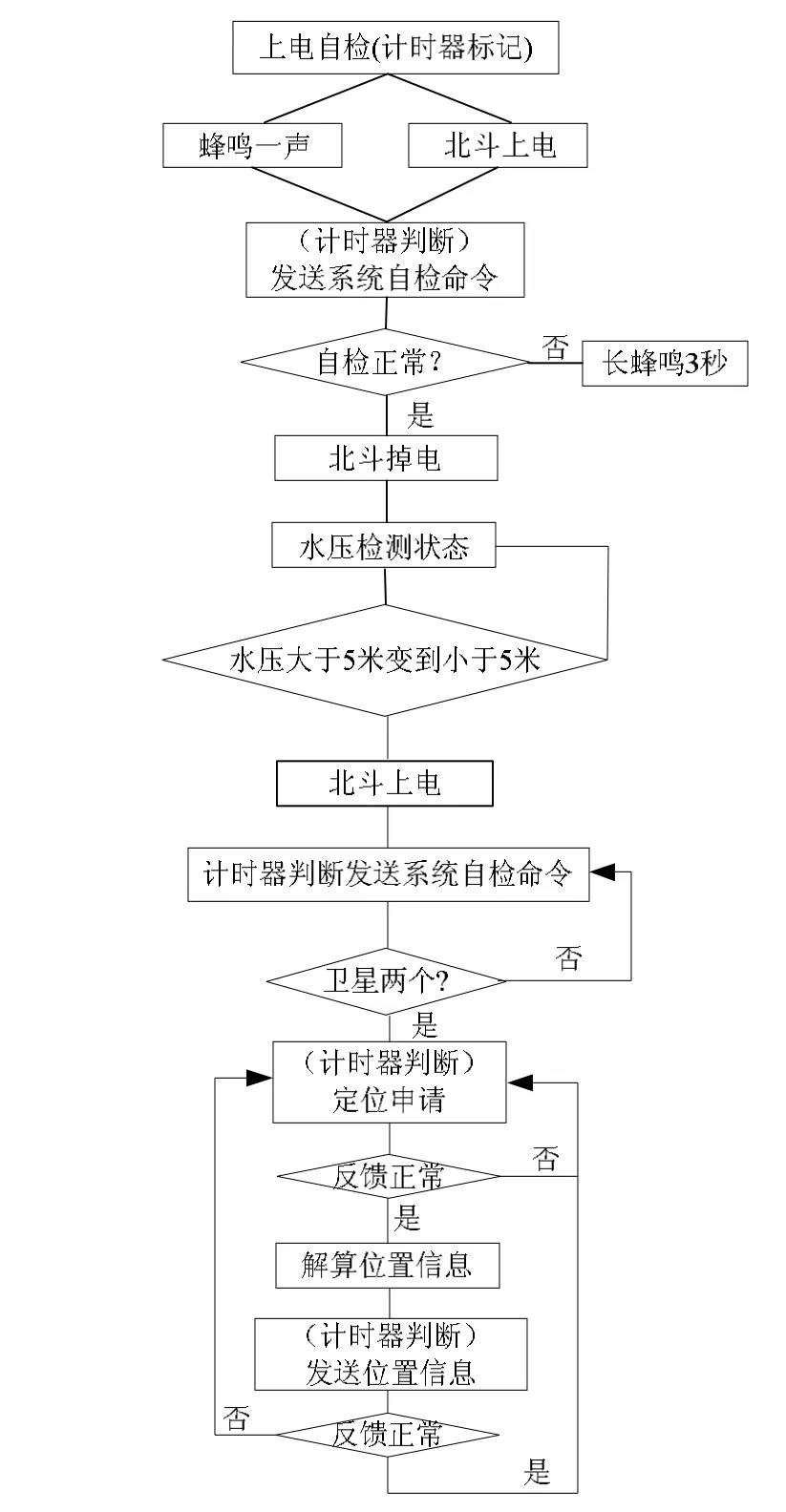
图7 水下上浮自动定位装置的工作流程
软件的设计中的主程序开始为初始化,主要包括系统时钟初始化、软件时钟初始化、串口接收设定初始化、A/D初始化,水下上浮自动定位装置的工作流程如图7所示。首先,系统上电后蜂鸣一声,并给嵌入式北斗模块上电,然后发送系统自检命令给北斗卫星,卫星返回自检信息,正常则系统给嵌入式北斗模块掉电,进入待机模式;不正常则系统长蜂鸣3s,则需重新给系统上电。在待机模式下,检测采集到的水压信号,当水压从大于5m变化到小于5m时,则给嵌入式北斗模块上电,切换到工作模式。重新发送系统自检命令,判断返回信息中的北斗卫星个数,小于2个时则再次发送系统自检命令,并再次判断返回信息中的北斗卫星个数,当大于等于2个则进行下一步定位申请。发送定位申请,并检测定位反馈,反馈异常则再次发送定位申请,反馈正常则进行定位信息解算。解算经纬度定位信息,发送通信申请,反馈正常或异常都返回再次发送定位申请。
4 结论
本文基于二代北斗系统,利用了MSP430单片机的片内外设资源,设计了一种水下上浮自动定位系统,可应用于各类需回收的水下试验设备。
参考文献:
[1]应士君,邹绪平,刘卫.基于北斗二代系统的的船用导航仪硬件设备及关键算法研究[J].科学技术与工程,2012,(9).
[2]吴维,齐久成,张静.基于北斗系统的ARGO浮标设计[J].气象科技,2013,(3).
[3]邹李兵.基于北斗报文的动态影像传输关键技术研究[D].成都理工大学,2009.
[4]胡大可.MSP430系列FLASH型超低功耗16位单片机.北京航空航天大学出版社,2001.
[5]秦龙.MSP430单片机应用系统开发典型实例[M].中国电力出版社,2005:143-161
[6]魏小龙.MSP430系列单片机接口技术及系统设计实例[M].北京航空航天大学出版社,2002.40-106
[7]胡大可.MSP430系列FLASH型超低功耗16位单片机[M].北京航空航天大学出版社,2001.243-301
[8]沈建华,杨艳琴,翟骁曙.MSP430系列16位超低功耗单片机原理与应用.北京:清华大学出版社,2004:10-11,115-173,204-215,258-285
[9]童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2001:171
[10]姜润翔,张晓兵,史建伟.水压场检测技术[M].兵器工业出版社,2015:102-103
Design of an Automatic Positioning System Based on the Beidou System
Zhang Jingzhuo1,Xiao Dawei2,Jiqin1
(1.College of Science,Naval University of Engineering,Wuhan 430033,China; 2.Department of Weaponry Engineering,Naval University of Engineering,Wuhan 430033,China)
Abstract:For the underwater measurement equipment,it is difficult to accurately position and easy floating away when it floats up to water surface.Aimed at the problem,an automatic positioning system based on the second generation of Beidou system is designed.The system adopts MSP430F149,a kind of low power MCU,as control core.With the positioning and communication function of Beidou satellite,the location information of the floating measurement system is sent to user terminal in the ship.As a kind of controllable,low power consumption and small volume device,the system is applicable to all kinds of recycling water measuring equipment.
Keywords:positioning; Beidou; MCU
中图分类号:TP277
文献标识码:A
文章编号:1003-4862(2016)06-0032-04
收稿日期:2016-01-26
作者简介:张景卓(1984-),女,讲师,主要研究方向:水声信号处理。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
发明与创新(2021年39期)2021-11-05
电脑报(2020年12期)2020-06-30
电子制作(2019年7期)2019-04-25
时代农机(2019年2期)2019-04-24
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
汽车维护与修理(2016年10期)2016-07-10
西安石油大学学报(自然科学版)(2015年4期)2015-12-16
中国煤层气(2015年3期)2015-08-22
