基于粒子滤波算法的动态协同定位系统性能研究*
2016-07-01 08:50童凯翔田世伟李广侠
通信技术 2016年2期
童凯翔,田世伟,李广侠
(1.解放军理工大学 通信工程学院,江苏 南京 210007;2.卫星通信与导航江苏高校协同创新中心,江苏 南京 210007)
基于粒子滤波算法的动态协同定位系统性能研究*
童凯翔1,2,田世伟1,李广侠1
(1.解放军理工大学 通信工程学院,江苏 南京 210007;2.卫星通信与导航江苏高校协同创新中心,江苏 南京 210007)
摘要:全球卫星导航系统在城市室内、森林峡谷等易对导航信号造成遮蔽、干扰的环境中难以保证其定位的可靠性。提出利用粒子滤波算法完成地面动态节点网络协同定位的新方法,并对其性能进行仿真研究。在缺乏伪距观测量的条件下,单一的终端节点难以实现精确定位。若多个节点之间通过相互测距,交互位置信息等方式实现协同,结合地面节点与卫星之间的伪距观测信息来实现对于动态节点位置与速度的估计。通过仿真实验,验证了所提出的新算法能够准确估计节点的位置、速度、伪距测量偏差等状态分量。
关键词:协同定位;粒子滤波算法;动态系统;估计性能
0引言
全球卫星导航系统(GNSS)广泛应用于地面用户的导航定位服务中。但是在一些存在信号遮蔽、干扰的恶劣环境,如城市室内、森林峡谷等,单纯的卫星导航系统就难以继续提供足够精度的定位服务。在单纯的卫星导航定位系统中,地面节点只有在至少获得来自四颗不同导航卫星的伪距观测信息的条件下才能实现定位。否则,节点将由于缺少必要的伪距测量信息而无法实现定位。最近许多的研究成果认为可以引入协同定位的思想来解决这类恶劣场景下的导航定位与跟踪问题。
在生物科学、智能计算以及通信工程等领域,协同思想都已经得到了广泛的应用。在导航定位与跟踪领域的研究中,协同定位的算法也引起了研究者的高度重视。如文献[1-2]给出了混合协同定位算法的克拉美罗界(Cramér-Rao bound,CRB),文献[3]提出了在无线传感网络定位中的节点分布新方法,文献[4-6]采用不同的算法来解决协同定位问题。上述研究成果表明,同其他的定位算法相比,粒子滤波算法能够获得更为精确的结果。
在已有研究工作的基础上,本文提出利用粒子滤波算法完成地面动态节点网络协同定位的新方法。通过仿真分析给出地面协同用户三维位置估计和速度估计。
1场景及系统模型
1.1场景模型介绍
参考文献[5]给出了如图1所示的协同定位场景。我们用参数组(M,S)来表征仿真场景,其中M表示网络中所有节点构成的集合,S代表节点可见导航卫星构成的集合。
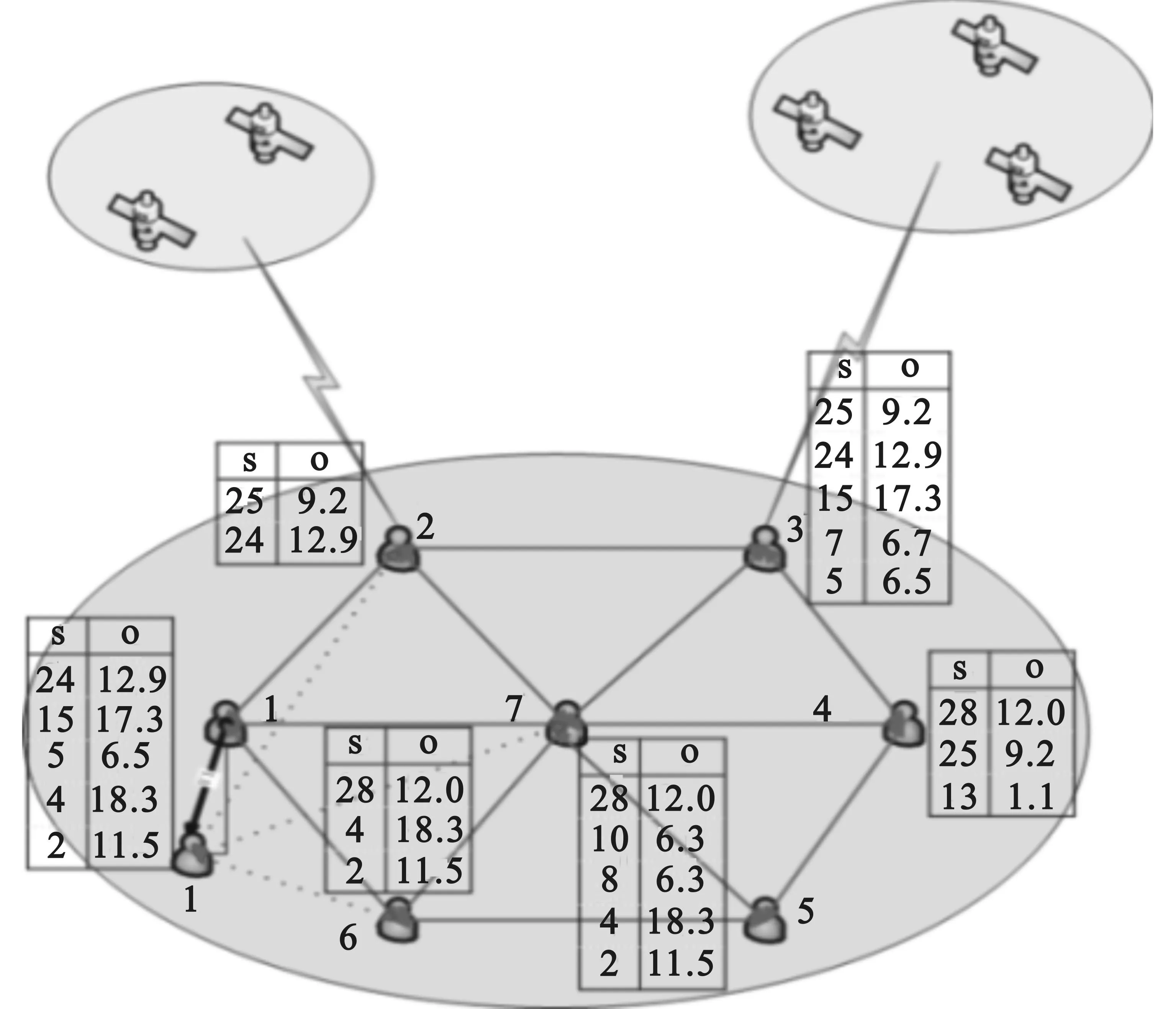
图1 协同网络示意
假设图中所示网络为一个动态网络,不同节点的可见卫星与其相应的数目均不同。不同节点各自以不同的速度独立运动(如图1中的节点1)。在每一个时隙,我们对每一个节点进行位置和速度信息的估计。在第k个时隙,节点i的状态矢量可以表示为:
(1)
(2)

在不采用协同算法的条件下,图1所示的网络中只有1、3、5三个节点能够实现自身状态估计,而其余的节点则无法实现精确的状态估计。
1.2系统模型
节点的状态更新方程为:
(3)
(4)
考虑移动传感器网络的定位问题时,存在“位置-时间(Position-Time)”模型与“位置-速度-时间(Position-Velocity-Time)”模型两种基本的系统模型[4-5]。本文分析动态条件下的PVT-模型中的协同定位性能。
在PVT模型中,系统的状态转移方程可以具体写为如下形式:
(5)
(6)
1.3观测模型
协同网络中的节点可以从各自的可见卫星获取伪距测量值,与相邻节点之间进行协同测距,观测模型可以用如下方程式表示:
(7)
1.3.1伪距测量


(8)
(9)
1.3.2协同节点间测距
节点之间距离测量可以用方程式(10)来表示:

(10)

(11)
所有的观测误差信息都可以写成一个协方差矩阵的形式:
(12)
式中,s∈S,j∈M。
2粒子滤波
粒子滤波算法的思想即是通过离散求和的方式来解决贝叶斯滤波中对后验概率密度函数(posterior probability density function,PDF)的积分运算。在tk时刻,后验概率分布可以表示为:
(13)
(14)
(15)

(16)

3基于粒子滤波的协同定位算法
在分布式的协同定位算法中,网络中的节点通过对网络中其余节点的位置信息的收集来完成本地的定位计算。与此同时,节点状态估计的协方差阵由下述方程计算得到:
(17)
本地状态矢量估计的协方差矩阵同节点的估计位置一起在整个网络中广播。
3.1滤波过程
(1)获取来自邻近节点的交互信息,包括邻近节点位置信息与临近节点状态估计的协方差矩阵。
(2)获得伪距观测值以及与临近节点之间的测距信息。
(3)用新的观测值对粒子进行更新,并考虑状态分量之间的约束关系。
(4)重采样。
3.2算法伪码
在仿真过程中,节点之间协同彼此位置信息以及位置不确定度。其中反映位置不确定度的协方差矩阵并不适于传输,为了简单起见,可以选择只协同共享协方差矩阵的迹。
由于节点处于运动的状态,所以重采样的过程不能简单地保留上一时隙中权重较大的粒子。文章提出的重采样算法以上一时刻给出的估计值为均值,重新产生一系列服从高斯分布的样本粒子作为重采样的粒子样本集合。由于在每一次迭代之后都会进行重采样,保证每一个时隙运算开始前都有粒子集合的更新,所以仿真中不会出现粒子枯竭的现象。
算法1基于粒子滤波的协同定位算法 - PVT 模型
2:for k=1:K
3:for i=1:M
4:每个节点的状态并行计算

6:for n=1:N

10:end for
12:权值归一化
13:利用(2)和下式计算节点状态
14: 利用(17)计算节点状态的协方差矩阵

16:end for
17:end for
图2表示了在本文采用的重采样算法中,节点利用新的时隙获得新的测量信息后粒子迅速收敛的过程。
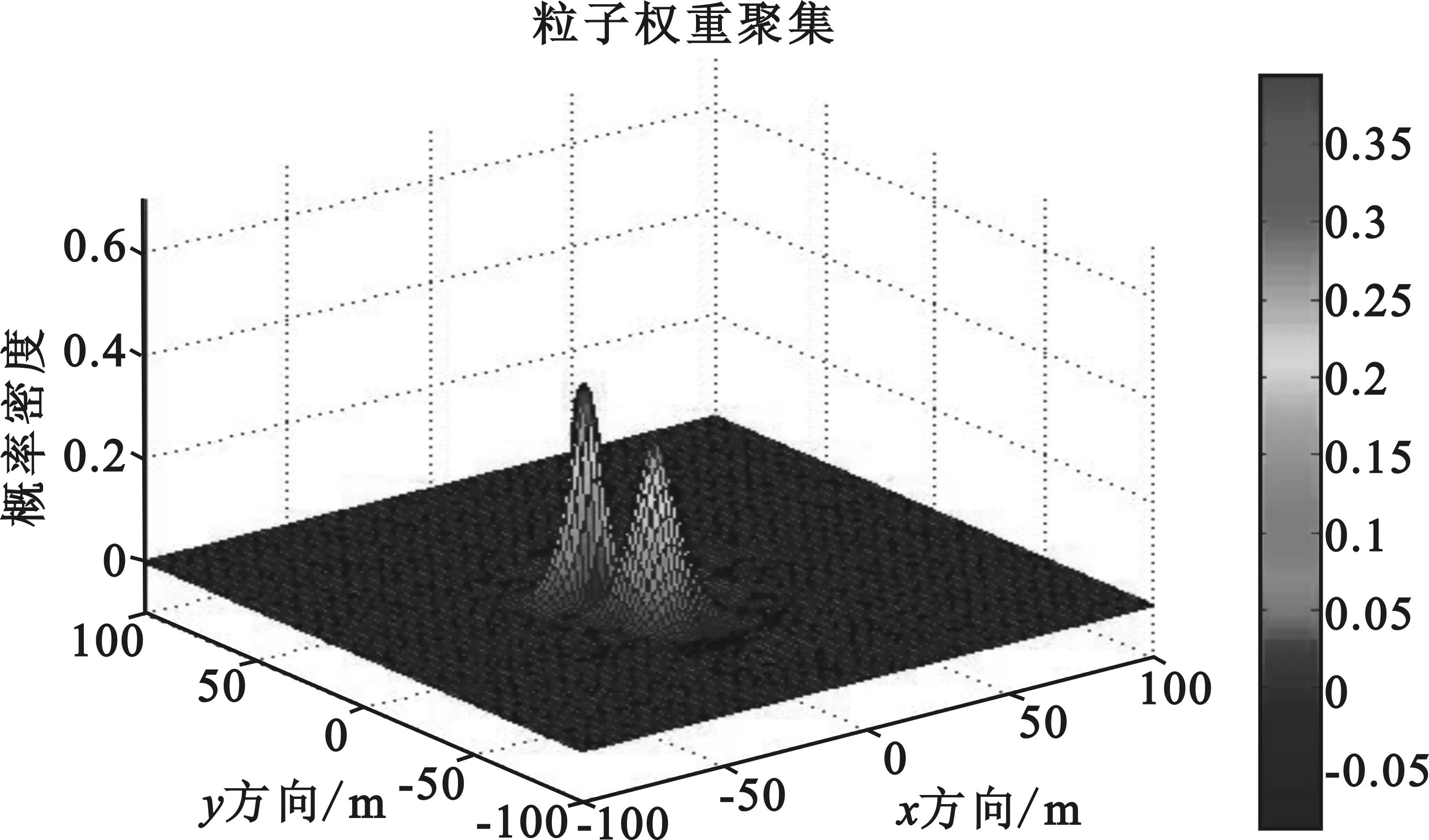
图2 粒子分布收敛过程
4仿真结果
仿真结果说明利用粒子滤波来解决地面动态节点网络协同定位的问题可以得到精确的状态估计。卫星和节点的坐标都统一在站心直角坐标系(ENU)中。


图3 水平方向统计均方根误差分布
从图3中可以看出利用粒子滤波解决协同定位问题能获得优于卡尔曼滤波的性能。图4反映了对系统中的三个在x方向上速度不同的节点x方向分量速度迭代估计的过程。从图中可以看出,经过4~5个时隙的迭代后估计值达到收敛。
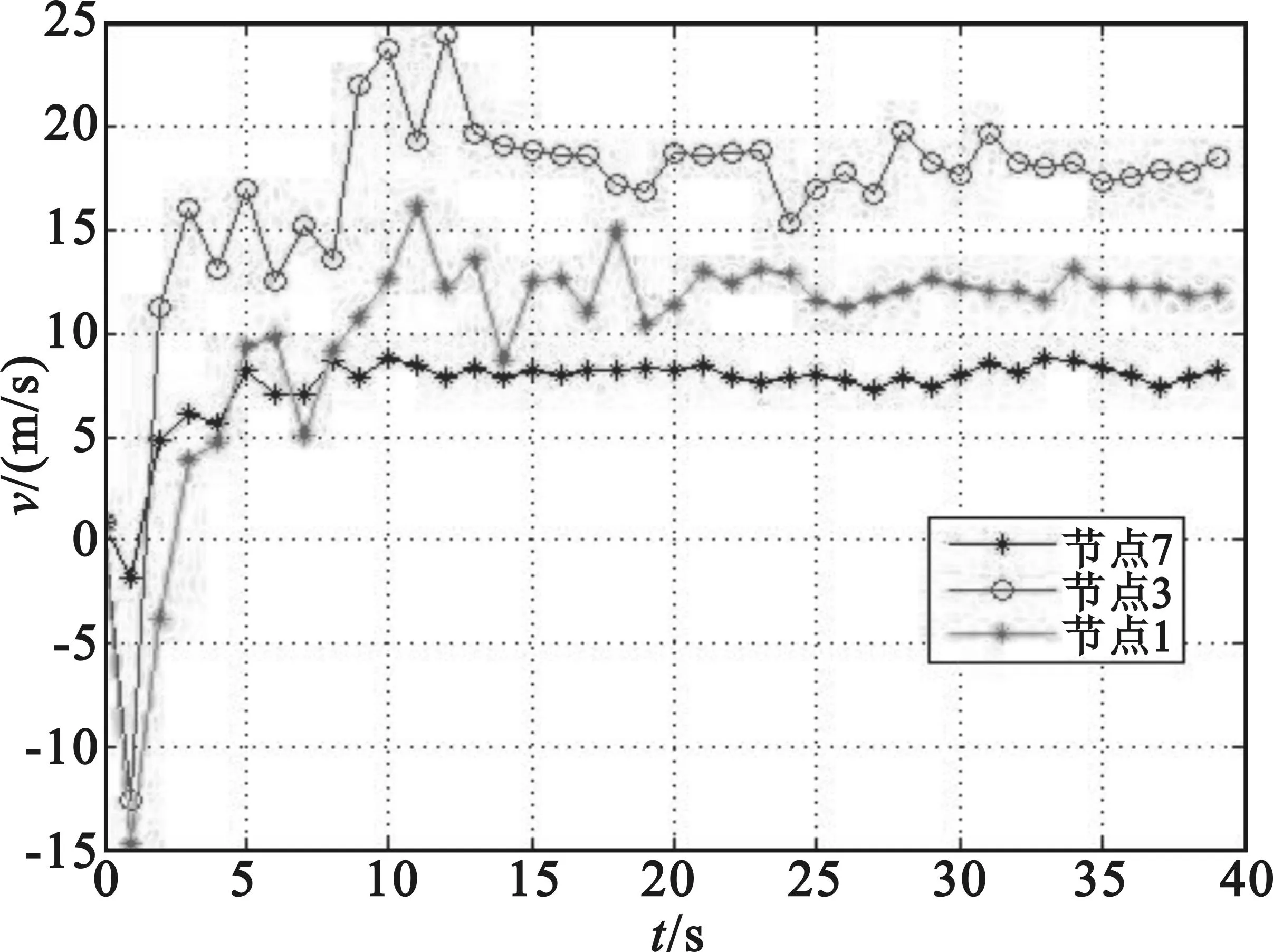
图4 速度分量的收敛特性
图5则给出了平均的偏差(Bias)估计的性能,在采用粒子滤波算法的条件下,协同网络中的节点的偏差估计始终维持在10 m以内。

图5 偏差估计平均值
5结语
本文主要讨论了动态条件下的协同定位问题,针对现有定位应用研究中缺乏对粒子滤波中出现粒子迅速衰竭的情况,加入修正因子λ使得粒子能够迅速收敛且不出现大量衰竭的情况。通过仿真实验,与现有成熟的卡尔曼滤波结果相比较,粒子滤波算法在定位结果精度性能上体现出了明显的优势。证明了了基于粒子滤波的协同定位算法不但能够使单纯利用卫星信号无法实现定位的地面节点实现定位与速度估计,而且能够获得更高精度的状态估计量。下一步的研究中应着重优化粒子滤波算法中的计算复杂度。
[1]Penna F,Caceres M A,and Wymeersch H.Cramér-rao Bound for Hybrid Gnss-Terrestrial Cooperative Positioning[J]// Communications Letters,IEEE,14,11,1005-1007.
[2]TIAN S,HUANG B,LI G,DAI W,LV J and CHANG J.A Perspective on Cramér-Rao Bound for Hybrid GNSS-Terrestrial Cooperative Positioning[C]//China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume III (pp.649-656).Springer Berlin Heidelberg.
[3]赵建平,马淑丽,刘凤霞等.WSN中一种新的锚节点分布方式 [J].通信技术,2015,48(08):926-933.
ZHAO Jian-ping,MA Shu-li,LIU Feng-xia,et al.A Novel Anchor Node Distribution in WSN [J].Communications Technology,2015,48(08):926-933.
[4]Caceres M A,Penna F,Wymeersch H and Garello R.Hybrid GNSS-Terrestrial Cooperative Positioning via Distributed Belief Propagation [C]//In Global Telecommunications Conference (GLOBECOM 2010),2010 IEEE (pp.1-5).IEEE.
[5]Caceres M A,Sottile F,Garello R and Spirito M A.Hybrid GNSS-ToA Localization and Tracking via Cooperative Unscented Kalman Filter.Proceedings of the Personal[J]//Indoor and Mobile Radio Communications (PIMRC),272-276.
[6]Sottile F,Wymeersch H,Caceres M A and Spirito M A.Hybrid GNSS-Terrestrial Cooperative Positioning based on Particle Filter[C]//In Global Telecommunications Conference (GLOBECOM 2011),2011 IEEE (pp.1-5).IEEE.
Dynamic Cooperative Positioning System based on Particle Filtering
TONG Kai-xiang1,2,TIAN Shi-wei1,LI Guang-xia1
(1.College of Communications Engineering,PLA University of Science and Technology,Nanjing Jiangsu 210007,China;2.Satellite Communication and Navigation Collaborative Innovative Center,Nanjing Jiangsu 210007,China)
Abstract:It is difficult for GNSS (Global Navigation Satellite System) to ensure its reliability in certain areas such as indoor environment,forest and canyon.A novel method for cooperative positioning among ground dynamic nodes based on PF (Particle Filtering) algorithm is proposed.Under the condition without any pseudo-range data,it is difficult for a single terminal node to make positioning accurately.Cooperative positioning among multiple nodes could be realized via mutual distance measurement and interactive location information,and by combining the pseudo-range information from satellites and ground nodes,the location and speed of dynamic nodes could be estimated.Simulation results verify that the proposed algorithm could accurately estimate the state components,including location,speed and pseudo-range deviation.
Key words:cooperative positioning; particle filtering; dynamic system; estimated performance
doi:10.3969/j.issn.1002-0802.2016.02.009
* 收稿日期:2015-09-20;修回日期:2015-12-30Received date:2015-09-20;Revised date:2015-12-30
基金项目:国家自然科学基金资助项目(No.91338201,No.61401507)
Foundation Item:National Natural Science Foundation of China(No.91338201,No.61401507)
中图分类号:TN927
文献标志码:A
文章编号:1002-0802(2016)02-0163-05
作者简介:

童凯翔(1991—),男,硕士研究生,主要研究方向为卫星导航与授时;
田世伟(1987—),男,博士,主要研究方向为卫星导航与协同定位;
李广侠(1964—),男,教授,主要研究方向为卫星通信与导航。