基于分布式网络化指控体系的协同跟踪设计
2016-06-28 08:02史秉政
指挥控制与仿真 2016年3期
关键词:分布式
史秉政
(上海机电工程研究所,上海 201109)
基于分布式网络化指控体系的协同跟踪设计
史秉政
(上海机电工程研究所,上海201109)
摘要:针对当前干扰防空环境下的作战特点,通过对网络化作战需求的分析,建立了一种分布式的网络化指挥控制体系架构,并结合协同跟踪的具体作战运用,设计了基于此分布式体系的协同跟踪作战流程,并建立了效能验证模型。对比一般的集中式指挥控制体系,基于分布式的体系具有生存性强、作战使用效能高的特点。
关键词:网络化作战;分布式;指挥控制体系;协同跟踪;效能评估
网络化作战是未来防空作战的重要发展方向。通过设计符合具体作战使用需求的网络化指挥控制中心,并对网络化组网作战流程进行优化设计,可以大幅提高各火力单元的协同作战效能。本文构建了一种分布式的网络化指挥控制体系,设计了基于此架构的协同跟踪作战流程,并建立了作战效能验证模型,形成了一套完整的网络化作战架构。
1概述
1.1网络化作战需求分析
通过近年来的几场典型战争,可以大致观察出现代战争的基本模式:进攻方首先进行大规模的信息干扰、电磁压制,或进行防区外、视野外饱和投弹攻击,使防御方的探测设施功能瘫痪,取得制电磁权;其次,进行电磁干扰下的空袭,摧毁防空设施、取得制空权,为后续军事行动提供空中支援;最后才开展地面军事行动。可见,电磁干扰下的体系化防空对抗作战将成为未来常态,作为应对,防空武器系统的网络化协同作战能力尤为重要。
网络化作战,是将多武器系统的多种探测器、多个指控节点和多个火力资源进行网络连接,以达到互联互通互操作,大幅提高武器系统的作战效能的目的。协同跟踪是指综合利用多个探测源的目标跟踪信息,以提升对目标的跟踪质量,是网络化作战的一种具体应用形式。
1.2国内外发展情况
目前在网络化作战理论研究及实际应用中处于前列的美国,其推进网络化作战的具体成果为[1]:
1)美海军的“协同作战能力系统”(CEC),用于舰艇间协同作战。CEC可将多艘舰艇间的探测信息融合成高精度且一致的作战态势,并实现各舰艇间的态势共享;对于某批目标,可由位置最佳的火力单元进行拦截,从而大大提高整个舰艇编队的作战效能。目前该系统已达到实战应用状态。
2)美陆军提出的“一体化防空反导作战指挥系统”IBCS项目,旨在为美陆军的防空反导体系构建一个集探测、指挥控制、情报、发射的网络中心系统解决方案,使任何探测资源、火力资源都能够纳入的一体化指挥控制网络。目前所提出的方案是将PAC-3、THAAD系统以及陆基先进中程导弹系统等武器系统的作战资源连为一体,进行网络化作战。
目前国内对网络化作战也正在进行积极的探索和研究,如文献[2-3]等所述。
1.3集中式网络化指控体系
网络化作战,通常是在网络化指挥控制系统的指挥下进行的。一般的网络化指控系统架构通常可设计为集中式,由单一的指控中心节点对下属的各作战火力单元节点进行作战指挥控制,包括下达指挥命令、发送目标数据信息等,下属各火力单元节点间无信息交互。作战时,各火力单元向指控中心上报局部空情,由指控中心进行融合得到全局空情,并进行指挥控制命令的下达。指控中心节点是整个系统的指挥控制中心、信息中心和计算中心,驱动整个防空体系网络各火力单元执行各项作战任务,在指控中心故障后,整个作战网络将无法继续工作。集中式网络化指控体系具体如图1所示。
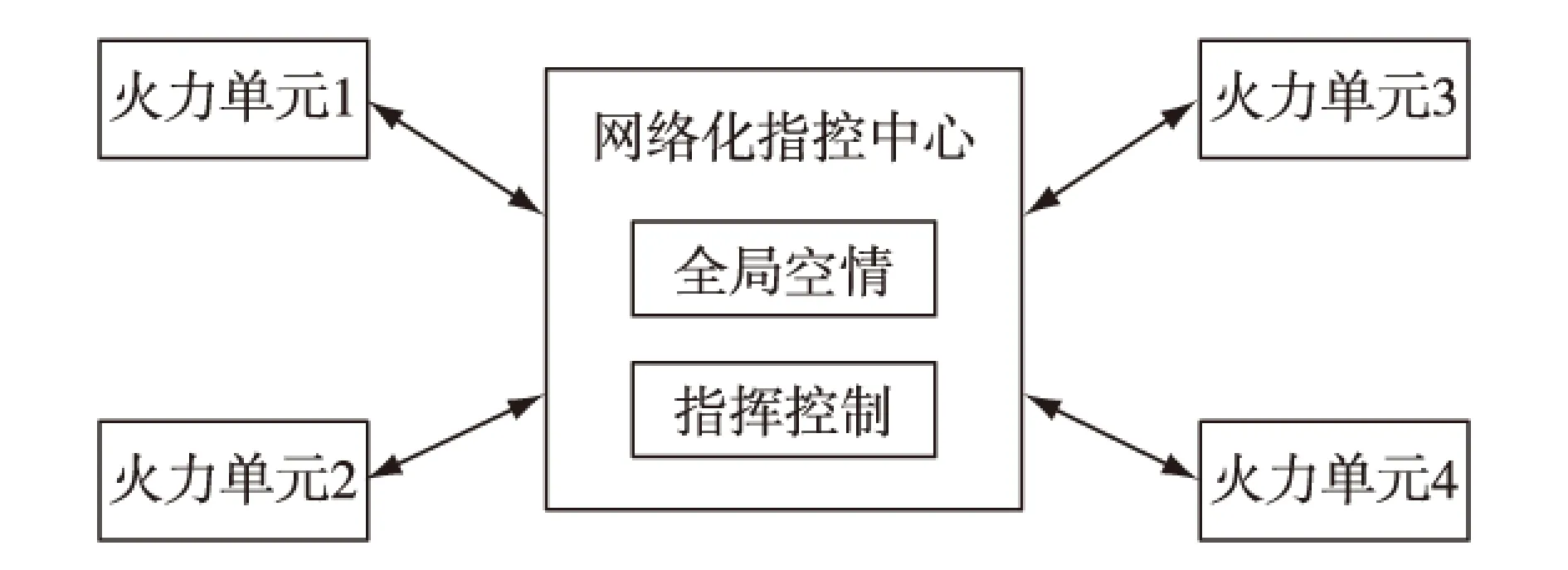
图1 集中式网络化指控体系
集中式网络化指控体系的优点在于其组网结构简单,指挥关系明晰,作战流程规划实现方便等,但由于其单中心的体系架构,系统存在单点失效情况;所有信息必须由指控中心进行统一解算处理,存在信息处理延时长的缺点;且指控中心解算负担重,其计算能力限制了整个网络规模,不利于节点的任意接入。综上,集中式网络化控制体系无法满足作战网络强生存性、负载均衡性和可扩展性的要求。
2分布式系统简介
2.1分布式系统原理
分布式系统,主要是指系统的硬件或软件组件分布在联网的计算机上,组件间通过传递消息进行通信和动作协调的系统。分布式系统通过在互联的多个计算资源上进行工作量的分配,并通过网络通信进行消息的传递,以共同协调完成工作。多节点的分布式系统可大大提高系统整体的生存性、负载均衡性和可扩展性。
2.2分布式系统特点
分布式系统具有3个特点:并发性、时钟异步性和故障独立性。
1)并发性
系统中可同时有多个任务并发执行,任务间可共享系统资源。并发执行的任务由不同节点承担完成,不必等待唯一的中心节点的统一处理。中心节点往往只需要进行任务的分配调度即可,任务分配完毕,各节点即可开展各自的工作。分布式将中心节点从繁重的具体的解算任务中释放出来,从而聚焦于整个系统的控制,包括任务调度和资源管理等,可平衡节点间的工作负荷,提高整个系统的任务处理能力。
2)时钟异步性
每个节点都有各自独立的时钟,而整个系统中无需做到各节点间的时钟统一,任务间的协调同步靠消息交互机制来保证。系统中需节点间协同的任务异步完成,降低节点协调的成本,提高各节点处理任务的效率,使得节点在处理任务时不会出现“死等”的现象。
3)故障独立性
个别节点出现故障,不会影响整个系统的稳定性。分布式系统中各节点间的弱耦合,避免了某一节点故障的传递,而由于各节点具有相似的功能,可以为节点设置备份,在有备份节点的情况下,甚至不会影响系统中当前任务的执行,系统健壮性大幅提高。
以上特点使得分布式架构成为适合于网络化指挥控制体系的一种设计范式。
3分布式网络化指控体系架构设计
3.1体系构建分析
在对分布式系统特点进行分析后,还需分析实际的作战使用需求,以指导分布式网络化指挥控制体系架构的设计,优化整个作战指挥网络。通过对需求进行分析,网络化指控体系还需满足以下几点要求。
1)集中式指挥
根据部队在作战中的指挥习惯,网络化指控体系的指挥结构需设计为集中式。网络化作战中必须仅有唯一的指挥中心,以保证命令信息的一致和对各火力单元的统一指挥。
2)分布式解算
网络化指挥控制体系中,对于某目标的具体参数信息解算,应由负责该目标所在区域的火力单元完成,而不是由指控中心完成。这样可以减轻指控中心的计算量,将工作重心放在对整个网络的指挥上,同时还可减少指挥中心转发的目标数据的信息量,降低网络负载。
3)生存性
指挥控制体系中只存在单一的指挥控制中心,虽可满足集中式指挥的需求,但整个体系却存在单点失效的问题,指控中心故障将导致整个系统的瘫痪,因而指控中心将成为整个系统的弱点以及敌方攻击重点。对于执行作战任务的网络化指挥控制体系,作战网络的生存性至关重要。
4)理解一致性
网络化作战体系,核心在于各节点数据解析协议的一致,即各节点对收到的命令信息、目标数据信息的处理动作是一致的,这样才能保证网络中的各节点可协同工作以及相互间可备份。
构建可应用于实战的网络化指挥控制体系,必须满足上述各点需求,作为设计约束。
3.2体系架构设计
针对上述分析,对分布式的网络化指挥控制体系进行设计:
1) 在整个系统中,某一时刻只有一个指控中心,负责整个网络指挥命令的下达,保证集中式指挥;
2) 网络中可设置备份指挥中心,一旦指挥中心故障,可从备份网指中依据事先约定的顺序选出新的指控中心,承担指挥任务,保证作战流程的顺利进行。备份指控中心可设置多个,实现多轮的接替;同时网络中各节点间有多条路径连接,冗余的通信路线可提高整个网络的健壮性;
3) 指控中心主要负责命令的统一下达,以及协同的调度,具体的目标数据信息将直接在指定的火力单元间交互,由火力单元完成对目标信息的融合等解算,以实现分布式解算;
4) 各火力单元对命令信息、目标信息数据的解析和处理采用相同的算法,即各火力单元在收到相同的输入信息后,将产生相同的输出结果,保证整个网络中各节点理解和行动的一致性。
基于以上条件,可设计网络化指控设备作为实现分布式网络化指挥控制体系的具体载体。各火力单元只要加装了该设备,即纳入了分布式网络化指挥控制网络,并可进行网络化作战。
网络化指控设备连接本地火力单元,并进行组网连接,代表火力单元进行信息交互。设备组成主要包括网络化指控中心与协同跟踪处理器。网络化指控中心是整个作战网络的指挥中心,负责指挥控制,在某一时刻只有一个网指可承担指控中心的作用,其它为可接替的备份网指。协同跟踪处理器负责整个网络中各火力单元接收的目标数据的一致性及可用性。由于其采用相同的算法,即可保证协同的火力单元对某批目标有相同的理解,使目标跟踪数据保持一致,以便于后续对目标进行坐标转换、协同跟踪等应用。
网络化指挥控制体系结构如图2所示。

图2 网络化指挥控制体系结构图
4协同跟踪作战设计
在纳入分布式网络化指挥控制网络后,各火力单元间已基本具备了网络化作战的能力,包括空情的共享、指挥信息的交互,以及跟踪数据的一致。同时基于此平台可进行具体协同跟踪作战流程的设计,以进一步提高网络化作战的能力。
4.1协同跟踪原理分析
在复杂电磁环境的战场态势下,当火力单元1受到目标的干扰时,往往只有该目标的方位信息,没有距离信息,导致无法对目标进行拦截,此时需要其它探测器对目标进行协同跟踪,提供支援信息,以完成拦截任务。由于目标的干扰往往具有一定的方向性或处于一定频段内,因此位于较远距离或处于其它频段的探测器可以得到该目标的距离信息。这样其它火力单元将该目标的距离信息发送到火力单元1,火力单元1利用支援的跟踪信息,经过解算得到需要的目标信息,完成对目标的拦截,此为协同跟踪的基本原理。
4.2分布式协同算法
根据协同跟踪作战的基本原理,以及各火力单元间的地位关系,本文对分布式火力单元间的协同跟踪流程设计采用基于对等网络的索引算法。对等网络,即对于通信网络,如果网络中各节点在功能上是对等、相同的,则可认为该网络是对等网络,该网络中的通信即为对等通信。对等网络的特征包括:去中心化、自组织、节点动态接入、可扩展性和容错性。索引算法,即在网络中有索引服务器,保存着各节点的数据索引信息(简略信息),某节点在请求数据时,首先在索引服务器中进行查找,若找到具有匹配信息的节点,再向该节点进行数据请求。数据(详细信息)传输在请求节点与发送节点间直接进行。
在分布式的网络化指挥控制体系中,网络中的节点主要为具备目标跟踪与拦截能力的各火力单元,可认为网络是对等网络;而网络化指控中心具有各节点上报的目标的简略信息,可认为是索引服务器,符合算法的设定。
4.3协同跟踪流程设计
基于对等网络索引算法的协同跟踪作战流程,步骤主要包括协同请求及应答,协同火力单元的选择调度,协同跟踪控制,目标信息传送,协同目标信息解算以及完成拦截等环节。
典型的火力单元间协同跟踪具体步骤如下:
1) 火力单元1在受到干扰而无法得到目标的距离信息时,向指控中心发送协同跟踪请求令,包括请求目标的批号、方位等信息;
2) 指控中心根据干扰目标的批号、方位等信息,在全局目标库中进行匹配,若匹配成功,则返回跟踪该目标的火力单元2;否则根据目标的角度信息、火力单元1的责任扇区以及其它火力单元的布阵位置和责任扇区等信息,返回适合跟踪的火力单元2;
3) 指控中心选择好协同的火力单元2后,向火力单元1发送协同跟踪响应,包括协同的火力单元2 的身份信息及其位置、指向信息;向火力单元2发送协同跟踪令,包括火力单元1的身份信息、位置、指向信息,以及目标批号、目标所在方位信息,指示火力单元2进行跟踪;
4) 经指控中心调度的火力单元间直接进行目标数据信息的传输。由火力单元2将目标跟踪信息发送到火力单元1,进行协同跟踪,火力单元1再经过时空对准,得到可利用的目标信息,完成协同跟踪;
5) 若火力单元2也受到了干扰,同样只有方位信息而没有距离信息,则发送到火力单元1的也只有方位信息,需要火力单元1进行交叉定位解算,才能得出目标的距离信息,从而完成协同跟踪。
协同跟踪流程如图3所示。

图3 协同跟踪流程图
上述流程中,以网络化指控中心作为协同跟踪的调度指挥中心,以协同跟踪处理器作为各火力单元的信息解算接口,实现了分布式指挥控制体系协同跟踪作战。
5效能验证模型
对于分布式指挥控制体系的效能分析可采用ADC效能分析法。效能分析的主要途径是对火力单元加装网络化指控设备前后的系统使用效能进行对比,以验证效能的提升。
5.1效能分析模型定义
根据美国工业界武器系统效能咨询委员会(WSEIAC)所给出的定义:“系统效能是预期一个系统能满足特点任务要求程度的度量,是系统的有效性、可信赖性和能力的函数”,即效能公式可表示为
E=A·D·C
(1)
此模型中,“A”是指有效性,是系统在开始执行任务时所处的状态的量度,也称可用度;“D”是指可信度,是已知系统在开始工作时所处的状态前提下,系统在执行任务过程中所处状态的量度;“C”是指固有能力,已知系统在执行任务过程中所处的状态,表示系统完成规定任务之能力的量度。
5.2指标体系
根据ADC模型提出的效能定义,可建立网络化指挥控制体系的效能评估指标体系,如表1所示。
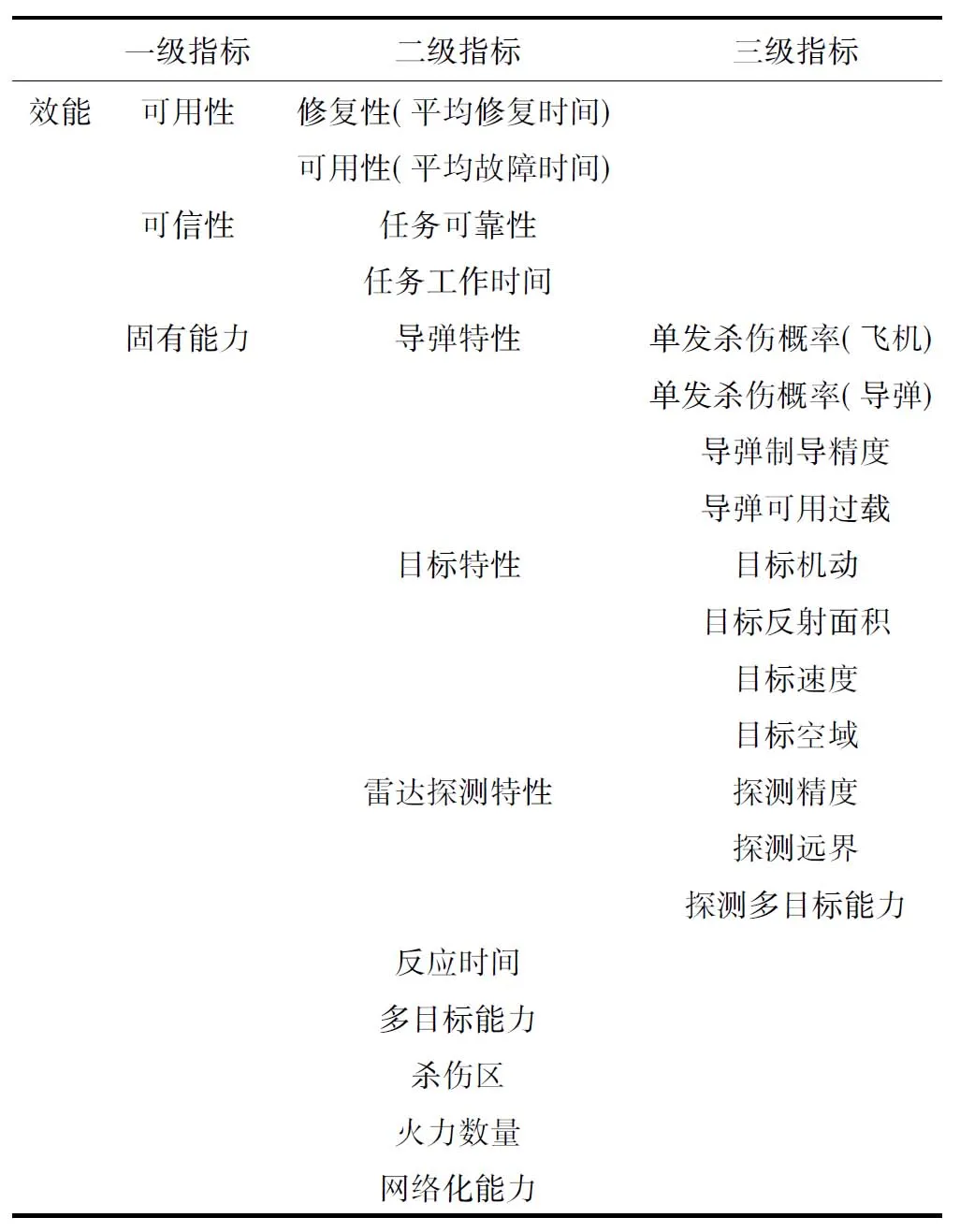
表1 效能评估体系
5.3效能评估
5.3.1可用性评估
可用性是在开始执行任务时系统状态的度量,可用系统在开始执行任务时的状态概率来表示。其概率可表示如下:
(2)
式中,MTBF为系统平均故障间隔时间,指可修复的系统在相邻两次故障间的平均工作时间。MTTR为系统平均故障修复时间,指系统从出现故障到恢复正常所需时间的平均值。MLDT为系统平均保障延误时间,在计算时可将MLDT取零值。
5.3.2可信性评估
可信性是在已知系统开始执行任务时所处状态的条件下,在执行任务过程中某个瞬间或多个瞬间的系统状态的度量,其向量为一个n阶方阵向量,可表示为
(3)
在具体计算中,可用任务可靠度代替。
5.3.3固有能力评估
固有能力是在已知系统执行任务过程中所处状态条件下达到任务目标的能力度量。在指标体系建立和指标值给出的基础上,采用层次分析法(AHP法)和专家决策法相结合的方式来确定各指标的权重,并根据一种评估指标的评分等级标准计算出各武器系统的相应效能值,进行对比评估。具体步骤包括:建立指标层次结构、确定指标权重、第二层次综合评判、第一层次总体评估。
5.3.4计算总效能
根据上述效能评估方法以及实际火力单元的具体指标值,可分别对火力单元的“ADC”进行评估计算,再由公式E=A·D·C得出总的效能评估值。
5.4评估结论
根据指标体系中的各项具体指标项,可对分布式网络化指挥控制体系的效能进行定性评估。在火力单元加装网络化指控设备后,对火力单元的性能均有提升或保持,同时火力单元的功能有了扩展,体现在效能评估中即为分值的提高,因此采用分布式设计的网络化指挥控制体系具有更高的作战使用效能。
定量的评估可依托实际装备的网络化改造项目进行。针对具体装备确定各项指标的具体值,根据上述方法对效能值进行计算。
6结束语
干扰环境下网络化协同作战是未来防空的重要发展方向。通过对网络化指控体系的构建因素分析,对比集中式网络化指控体系,设计了分布式网络化指挥控制体系架构,并在此基础上进行了协同跟踪作战流程的设计以及效能验证方法的建立。本网络化指挥控制架构和协同跟踪流程,可以提高现有火力单元作战效能,为后续进一步的网络化作战研究提供基础架构和思路。
参考文献:
[1]刘莉,李栋花. 地空导弹网络化改造总体技术研究[C].空天防御体系论文集(第十集),2011:248-256.
[2]武思军.防空反导网络化作战发展研究[J].现代防御技术,2012(2):55-59.
[3]张杰勇,姚佩阳,周翔翔,等.网络化作战指挥控制组织设计方法综述[J].电光与控制,2012(19):63-67.
[4]武思军.防空反导网络化作战相关技术与建议[C].空天防御体系论文集(第10集), 2011:237-247.
[5]宋启勋,廖兴禾,刘文博.“分布式网络化作战”理论特征探析[J].四川兵工学报,2009(9):104-106.
[6]Hwang Kai.云计算与分布式系统[M].武永卫,译.北京:机械工业出版社,2013.
Cooperative Track Procedure DesignBased on Distributed Network Command & Control System
SHI Bing-zheng
(Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109, China)
Abstract:Accords to the battle traits under the interfere air-defense environment, via the analysis of network centric warfare(NCW) demands, found a distributed network Command & Control system, and combine with the cooperative track apply, designed the cooperative track procedure based on the distributed system. Compared with the concentrative system, the distributed system is better in subsistence performance and effectiveness.
Key words:network centric warfare(NCW); distributed; Command & Control system; cooperative track; efficacy assessment
文章编号:1673-3819(2016)03-0102-06
收稿日期:2016-01-04
作者简介:史秉政(1984-),男,山西太原人,硕士,工程师,研究方向为指挥控制系统。
中图分类号:E94
文献标志码:A
DOI:10.3969/j.issn.1673-3819.2016.03.020
修回日期: 2016-02-29
猜你喜欢
湖南电力(2022年3期)2022-07-07
湖南电力(2022年3期)2022-07-07
煤气与热力(2021年9期)2021-11-06
军民两用技术与产品(2021年5期)2021-07-28
铁道通信信号(2020年7期)2020-02-06
电子制作(2019年22期)2020-01-14
制导与引信(2017年3期)2017-11-02
雷达学报(2017年1期)2017-05-17
雷达学报(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07