实现微弱GPS信号快速捕获的改进算法
2016-06-23 08:20:37刘原华牛新亮
电视技术 2016年2期
王 丽,刘原华,牛新亮
(1. 西安邮电大学 通信与信息工程学院,陕西 西安 710121;2. 中国空间技术研究院西安分院,陕西 西安 710000)
实现微弱GPS信号快速捕获的改进算法
王丽1,刘原华1,牛新亮2
(1. 西安邮电大学 通信与信息工程学院,陕西 西安 710121;2. 中国空间技术研究院西安分院,陕西 西安 710000)
摘要:为了能够在低信噪比下实现微弱信号的快速捕获,必须增加处理增益。要提高增益就要进行累积,而累积易受导航电文翻转和多普勒频偏的影响。为了克服两者的影响,传统的捕获方法通常采用相干加非相干累加的捕获算法,但是非相干累加又引入了平方损耗,并且对频率走动效应补偿有限。随着积分时间长度的加长,数据翻转和多普勒变化的影响会愈加突出,传统的算法已不能满足要求。对此,一种新的弱信号快速捕获算法被提出。该算法采用奇偶相间分别相干累加的方法进行数据补偿和并行多普勒搜索的方法进行多普勒补偿,从而在尽量延长单次相干积分时间的基础上,实现了多次相干积分结果的多次相干累加。最后计算机仿真验证,该方法是有效的和正确的,并且与传统方法相比,同样条件下,改进算法的累加次数是传统算法的1/8,捕获时间缩短了1/4以上。
关键词:弱信号;捕获;平方损耗;导航电文翻转;多普勒频率
如今随着信息时代的飞速发展,人们对卫星导航定位系统性能的要求越来越高,要求其在城市高楼密集街区、树木严重遮挡的公路,甚至幽深的隧道、室内、地下车库等信号微弱的环境下,依然能够快速地实现定位。然而在这些环境下,一般的导航接收机或者不能正常定位,或者首次定位时间太长,这极大地限制了导航接收机的应用范围。因此,开发高灵敏度微弱信号(HSGPS)快速捕获新算法是接收机利用较弱的信号实现快速定位的首要问题。
要解决低信噪比环境下微弱信号快速捕获困难的问题,延长等效积分时间是根本途径,但积分长度受限于导航电文翻转和多普勒频偏的影响。为了解决这两个问题,传统的方法大多采用相干加非相干累加的方法。但是,非相干累加引入了平方损耗,而且只能在一定程度上补偿多普勒频偏,远不能满足长时间积累的要求。因此,为了克服传统伪码捕获算法中的不足,一种基于数据补偿和多普勒补偿的弱信号快速捕获算法被提出,该方法采用奇偶相间分别相干累加的方法对数据进行补偿和并行多普勒搜索的方法进行多普勒补偿。与传统方法相比,针对-153 dBm的弱信号,传统算法需要累加298次,而改进算法只需40次就能完成弱信号的捕获,大约是传统捕获算法的1/8,大大缩短了捕获时间,从而实现微弱信号的快速捕获。
1传统伪码捕获算法的问题分析
通常情况下的GPS信号的强度是-130 dBm,而GPS弱信号是指信号强度在-144~-158 dBm之间的信号[1],比普通的要低14~28 dB。对弱信号进行捕获时,常用的方法就是加长单次相干积分时间,但是由于导航数据长度的局限性,发生比特符号翻转的可能性较大,并且随着积分长度的不断加长,用户和接收机之间的相对运动引起的多普勒变化也会愈来愈显著,因此,必须采取一定的应对措施。
传统的方法通常采用相干-非相干相结合的捕获算法。弱信号的捕获一般需要对较长时间的中频数据进行分段处理,如传统的捕获算法就是先计算每段的相干积分,然后对相干积分的结果平方后,再进行累加,从而实现非相干累加。基于相干-非相干的伪码捕获算法的最终判决量为
(1)
由式(1)知,非相干累加中采用的平方操作使得噪声也被放大了,从而引起所谓的平方损耗。
非相干积分的平方损耗[2]定义为
(2)

根据式(2),得到了如图1所示的平方损耗图。从图中可以明显看出,非相干损耗随着相干信噪比的增加而逐渐降低,但在相干信噪比小于10 dB时,非相干积分提高信噪比的能力仍然不如相干积分,这一点为相干积分提高信噪比的能力是最强的提供了更加有效的理论依据。
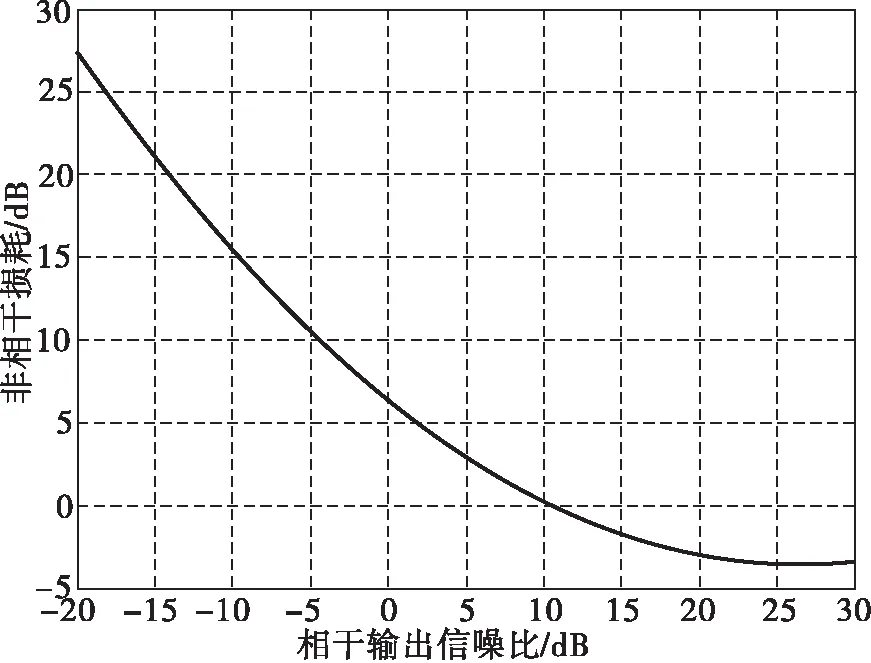
图1 非相干积分的平方损耗随着相干信噪比的变化
尽管非相干累加对导航电文翻转不敏感,但是其多普勒的容忍能力是有限的。如果接收机与卫星之间的动态不断加大,导致不同时间段上的输入信号中的载波多普勒频移逐渐变大,造成对同一频率单元格上的不同时间间隔得到的相干积分结果中总有一部分由于残留载波多普勒频移过大而受到严重衰减。在这样的条件下,检测性能将会迅速恶化[3],增加了捕获的难度,从而影响捕获性能的判决。
因此,基于以上问题,必须提出一种适用于低信噪比条件下实现微弱信号快速捕获的新方案,并且要满足两个要求:先进行数据补偿,然后对多普勒频偏进行实时补偿。这将是本文研究的重点,下节将给出详细的方案设计。
2新捕获方案的设计
由于数据翻转比多普勒频率变化快,短时间内,多普勒对捕获性能的影响不明显,几乎可以忽略,只需对数据进行补偿。但随着相干积分长度的不断加长,也需要对多普勒进行实时补偿。所以该方案先对导航数据进行分析,并给出数据补偿的具体实现方法,然后对多普勒变化进行分析,同样给出了具体的实现方法,最后给出新捕获方案的基本结构图。
2.1导航数据分析
为了能够在低信噪比的条件下完成对弱信号的快速捕获,必须对多个C/A码周期本地码的相关结果进行一定的累加,以提升信噪比。相干累加虽没有平方损耗,但是,正如前面已经提到的,由于受限于导航电文翻转和多普勒频偏的限制,而且导航数据无法提前预知,因而会给载波带来180°的相位翻转。考虑到导航数据的传播速率,则相干积分时间不能超过20 ms,进一步来讲,由于无法预知导航电文的跳转边沿,所以相干累积时间不能无限制地加长。
导航数据造成的相关损失[4]为
(3)
由式(3)知,当τ=1/2NNC时,即如果数据翻转发生在相干累积时间的中心,则此时损失最严重。当然,导航电文翻转的概率也要考虑。综合以上因素,为了消除导航数据相位翻转的影响,单次相干积分时间设为10 ms。由于1 bit数据的持续时间为20 ms,所以在未知导航数据比特取得同步的情况下,相干积分时间最长一般设为10 ms,因为这样可以保证相邻的两个10 ms输入数据段中至少有一段不受比特符号翻转的影响[5]。
假定输入信号的功率为-153 dBm的弱信号环境,设计中采用10 ms的相关累积,其等效带宽为100 Hz,对应的噪声基底是-151 dBm,则相应的信噪比为S/N=-153 dB-(-151) dB=-2 dB。为了能获得14 dB的信噪比,相关增益需要有16 dB,这要求大约40次的相干累加。为了将未发生数据翻转的相干结果累加起来,最多需要80个10 ms的数据块进行数据处理。本文采用奇偶相间分别累加的方法对数据进行补偿,用800 ms的中频数据进行微弱信号的捕获。首先对其分段,分为80个10 ms的数据段。然后每隔1个10 ms选取部分做相关积分,即将完成载波分离的760 ms的数据根据下标分成奇数组(A1,B3,C5,D7…),偶数组(A0,B2,C4,D6…),如图2所示。相同的英文字母是一组,分别代表前10 ms和后10 ms。最后将奇数组的数据块加在一起,偶数组的数据块加在一起。
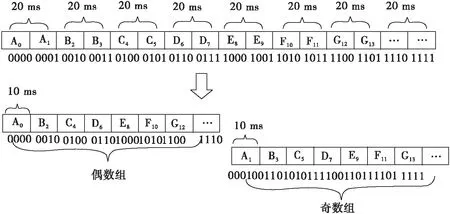
图2 数据块的分割图
2.2多普勒频率分析
在低信噪比的环境下进行长时间积累时,用户和接收机之间的相对运动引起的多普勒变化也会随着时间的不断增加越来越快。如果只进行数据补偿,而忽略多普勒补偿,多普勒频率的走动将会影响卫星信号的捕获性能,甚至捕获失败。因此,在对数据进行补偿的同时也要对多普勒进行实时补偿。
多普勒的估计一般采用对不同的多普勒频移值进行搜索测试的方法[6]。本文采用并行多普勒搜索的方法对多普勒实时补偿。多普勒频移定义为
fd=(i-1)×Δf,i=0,1,…,L
(4)
低动态下,fd∈[-5 kHz,5 kHz],搜索步进Δf需满足使得多普勒频移带来的相关损耗足够小的要求。表1给出了积分长度增加时,多普勒频移是如何变化的。
表1相干积分长度和多普勒频移的相互影响
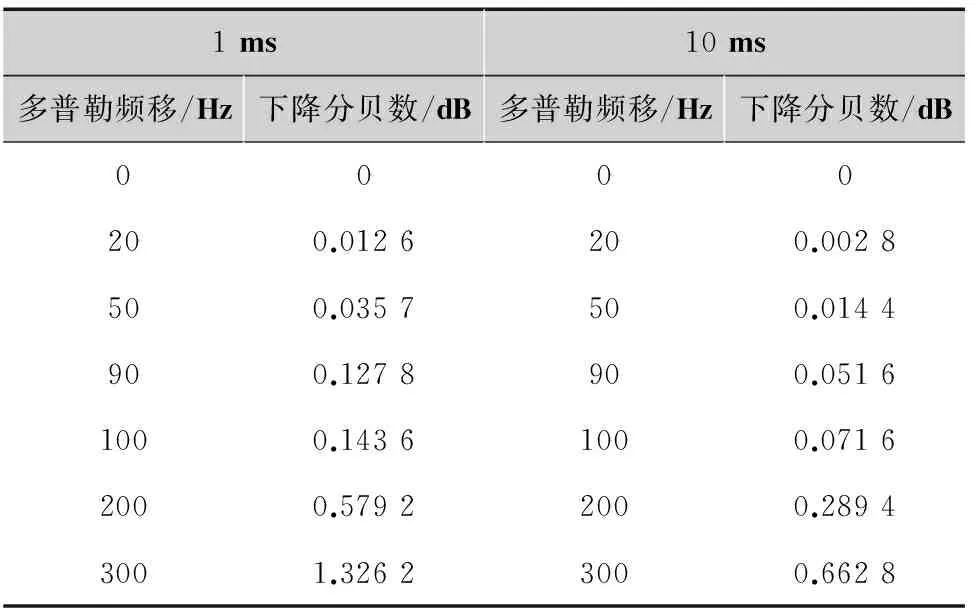
1ms10ms多普勒频移/Hz下降分贝数/dB多普勒频移/Hz下降分贝数/dB0000200.0126200.0028500.0357500.0144900.1278900.05161000.14361000.07162000.57922000.28943001.32623000.6628
由表1可知,多普勒频移较小时,增加相干积分长度,有利于信号检测,反之将影响GPS信号的捕获性能。由信号检测与估计理论[7]可知,在N-P(Neyman-Pearson criterion)准则下,捕获概率为
(4)

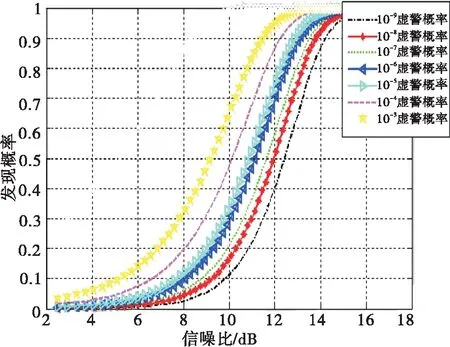
图3 检测概率与虚警概率及信噪比的曲线关系
从图3可以看出,当相干累加后的输出信噪比大于14 dB时,发现概率达到0.95以上,虚警概率低于10-7。虚警概率越低,发现概率越高,捕获系统的性能越好[6]。
并行多普勒搜索通过选择合适的多普勒频移,然后对多普勒进行实时补偿,不仅缩短了捕获时间,而且捕获时间不会随着频偏的增大而增加[8],又有效地消除了多普勒频偏对捕获性能的影响,提高了弱信号的捕获性能。
在低信噪比的条件下,通过提高增益来实现弱信号的快速捕获。相干累加在提高增益方面是最有效的,图1也进一步证明了这一点。结合以上所有分析,得出本文的伪码捕获算法——多次相干积分加多次相干累加,如图4所示。
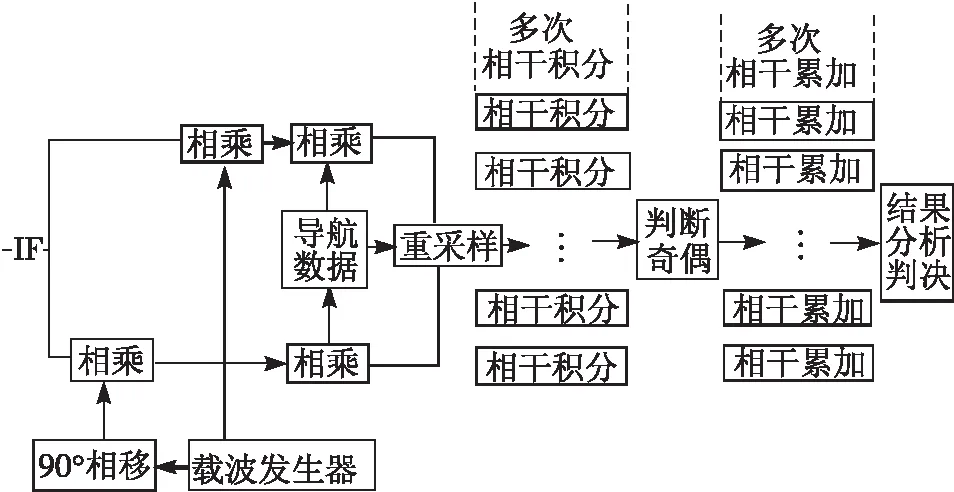
图4 新捕获方案的基本结构
3MATLAB仿真验证和分析
系统的仿真环境是MATLABR2014a,中频频率为1.25 MHz,采样频率为5 MHz,单次相干积分时间设为10 ms,码片时域搜索为0.2个码片,频率搜索步长为频率分辨率的1/5,并且在总积分时间为800 ms的条件下进行仿真验证。
图5显示有明显的峰值,说明新方案在800 ms的积分时间内能够捕获到-183 dBW的弱信号,曾有文献认为10 ms的相干积分一般只能捕获到功率最低为-171 dBW的卫星信号,如果想捕获到更弱的GPS信号,需要对相干积分结果进一步进行非相干积分,以继续提高信号的信噪比[9]。进行非相干积分需要考虑平方损耗,增加了算法的复杂度,而相干累加不需要考虑这些,而且能很好地提升信噪比。

图5 改进的捕获方法(截图)
为了进一步验证改进算法的有效性,在同样的条件下,本文对相干-非相干捕获算法也进行了仿真验证。非相干累加虽然能够将I/Q支路的能量集中起来,使得累加结果不受多普勒频偏的影响,同时非相干累加对电文翻转也不敏感。但是非相干累加在获得增益的同时,噪声也被放大了,存在严重的平方损耗,以致于相关峰值不太明显,几乎被噪声所淹没,没有改进算法效果好,如图6所示。
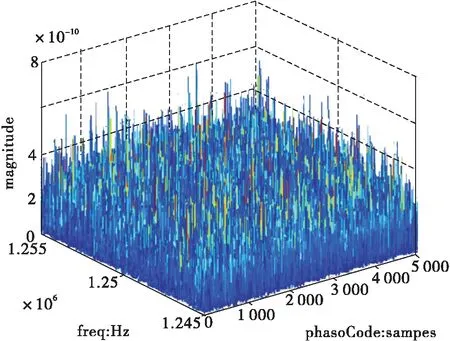
图6 传统的捕获算法(截图)
上述的的仿真分析与理论分析相符,而且只需40次相干累加就可以达到预期的效果,减少了计算量,提高了捕获的效率。而传统的捕获算法需要进行298次非相干累加,不仅不能提高捕获时间,反而由于不断的平方操作将噪声逐渐放大,将信号几乎淹没,影响了卫星信号的捕获性能。因此,该方案是正确和有效的。
4结论
本文针对低信噪比下GPS弱信号的捕获进行了问题分析,然后根据问题提出了一种新的方案,并对该方案进行了验证分析。新方案有效地避免了数据翻转和多普勒频率对GPS弱信号捕获性能的影响,使得相干积分时间得以延长,以提高积分增益,同时结合相干累积,大大降低了累加次数,使接收机的灵敏度得到进一步的提高。而本文的仿真结果表明,通过10 ms的相干积分和多次相干累加可以获得16 dB增益的改善,使得算法能够捕获-35 dB左右的微弱GPS信号,并且捕获时间缩短了1/4以上,大大提高了GPS软件接收机的灵敏度,从而实现了微弱信号在低信噪比条件下的快速捕获。本文研究当然也有不足之处,忽略了实际中的一些非相关因素,没有考虑多普勒频率变化率对C/A码的影响,这些将会是未来研究的重点。
参考文献:
[1]马永奎,张一,张中兆,等. 改进的高动态高灵敏度GPS信号捕获算法[J].系统工程与电子技术,2009,31(2):265-269.
[2]BORIO D,AKOS D. Non-coherent integrations for GNSS detection: analysis and comparisons[J]. IEEE transactions on aerospace and electronic systems,2009,45(1):360-375.
[3]仝海波,朱祥维,张国柱,等. 多卫星导航信号联合捕获算法的检测性能分析[J]. 电子与信息学报,2014,36(5):1070-1074.
[4]DRISCOLLC O. Performance analysis of the parallel acquisition of weak GPS signals[D]. Cork:National University of Ireland,2007.
[5]徐晓苏,范金洋. GPS软件接收机捕获算法[J].中国惯性技术学报,2009,17(2):165-169.
[6]梁林方. 弱信号GPS接收机的捕获算法研究[D].成都:电子科技大学,2011.
[7]赵树杰,赵建勋. 信号检测与估计理论[M]. 2版. 北京:清华大学出版社,2005.
[8]罗炬锋,王翔,付耀先,等. 基于FFT并行搜索伪码和频偏的快速捕获新算法[J]. 电子与信息学报,2011,33(3):563-568.
[9]刘春玲,王道军,别玉霞. 一种基于FFT的弱信号快速捕获算法[J].计算机仿真,2015,32(3):225-229.
Weak GPS signal rapid capture of improved algorithm
WANG Li1, LIU Yuanhua1, NIU Xinliang2
(1.Xi’anUniversityofPostsandTelecommunications,Xi’an710121,China;2.Xi’anBranchofChinaAcademyofSpaceTechnology,Xi’an710000,China)
Abstract:In order to achieve rapid acquisition in low SNR, the processing gain must be increased. To increase the gain is to accumulate, and accumulating is easily influenced by the navigation message flip and Doppler frequency offset. To overcome the above two factors, the traditional acquisition method usually adopts coherent and the non-coherent accumulation, but the non-coherent accumulation lead to the square loss, and the frequency moving compensation effect is limited. With the increase of the length of integral time, the influence of the data inversion and Doppler change will become more prominent. The traditional algorithm can’t meet the requirements. Therefore, a new fast acquisition algorithm of weak signals is proposed. The algorithm uses parity interphase cumulative method for data compensation and parallel Doppler search element method for Doppler compensation, in the base of trying to extend a single coherent integration, the multiple coherent integration result of multiple coherent accumulation is realized. Finally, the computer simulation shows that the program is correct and effective, and compared with the traditional algorithm, in the same conditions, cumulative number of improved method is reduced about 1/8, and the captured time of the method is improved more than a quarter.
Key words:weak signal; acquisition; square loss; the reverse of navigation data; Doppler frequency
中图分类号:TN911.6
文献标志码:A
DOI:10.16280/j.videoe.2016.02.020
基金项目:国家自然科学基金项目(61201194);陕西省自然科学基础研究计划项目(2014JQ8318)
作者简介:
王丽(1989— ),女,硕士生,主研GPS弱信号捕获算法研究和移动通信技术及应用;
刘原华(1983— ),女,博士,副教授,硕士生导师,从事GPS卫星导航信号处理、通信调制与信道编码研究。
责任编辑:薛京
收稿日期:2015-07-19
文献引用格式:王丽,刘原华,牛新亮.实现微弱GPS信号快速捕获的改进算法[J].电视技术,2016,40(2):103-107.
WANG L, LIU Y H, NIU X L.Weak GPS signal rapid capture of improved algorithm[J].Video engineering,2016,40(2):103-107.