智能型TSC的晶闸管可靠触发的分析与研究
2016-06-22 06:20陈杏灿程汉湘彭湃
广东电力 2016年5期
陈杏灿,程汉湘, 彭湃
(广东工业大学 自动化学院,广东 广州510006)
智能型TSC的晶闸管可靠触发的分析与研究
陈杏灿,程汉湘, 彭湃
(广东工业大学 自动化学院,广东 广州510006)
摘要:针对低压无功补偿的调节器中MOC 3083型双向晶闸管驱动器来触发晶闸管容易误动与驱动电路容易损坏等缺点,以单片机为控制核心,充分利用光耦合器的特性,改用电磁驱动的方式驱动晶闸管,对晶闸管的过零检测电路与晶闸管的驱动电路进行重新设计,并进行相关实验,所得结果表明,该改进后的调节器能够准确地检测晶闸管两端的过零信号,并且能准确在过零点投入电容器,具有冲击涌流小的优点。改进后的调节器运行可靠性高,性能稳定。
关键词:无功补偿;MOC 3083型双向晶闸管驱动器;单片机
随着社会的进步和发展,人民生活水平逐渐提高,大量用电客户在用电高峰期出现端电压偏低、部分家用电器无法正常启动、严重的甚至导致过负荷跳闸断电的现象[1]。安全、经济、稳定的电力系统一直是全社会追求的目标,合理的无功分布可以在节约能源、提高电能质量乃至整个系统稳定性方面都有着非常重要的作用[2-3]。无功补偿装置可改善电网的功率因数,减少输电线路以及变压器的能量损耗,提高变压器和输电线路的能量传输率,在稳定电网电压的同时,还可以提高供电质量[4]。随着全社会自动化水平的不断提高,电力设备对电能质量也提出越来越高的要求,无功补偿具有改善电网的功率因数及提高电能质量等优点,己成为电力行业密切关注的问题[5]。无功补偿容量过大将造成资源浪费,无功补偿容量过小会导致系统的功率因数降低[6]。因此,为了提高电网的运行效率和电力系统的稳定性,改善电能质量和降低系统能耗等,无功补偿将是不可缺少的重要技术[7]。市场激烈竞争中,许多厂家为了节约成本,对低压无功补偿调节器的设计仍然采用简单的光耦MOC 3083型触发晶闸管,但这类调节器在使用中经常出现误动、驱动装置损坏,甚至造成电容器爆炸,严重影响了配电网的供电可靠性,制约了低压无功补偿的发展。因此,研究晶闸管投切电容器(thyristour switched capacitor, TSC)晶闸管的可靠触发,改进不足,设计新型可靠的调节器,对促进低压无功补偿具有重要意义。
1调节器中晶闸管触发的可靠性分析
调节器作为投切电容器的执行机构,是整套TSC无功补偿的核心。当其两端电压变化率为零投入时,冲击涌流为零。因此,电容器投入过程中,最重要的就是过零投切。目前,低压无功补偿调节器仍然普遍使用如图1所示的结构。
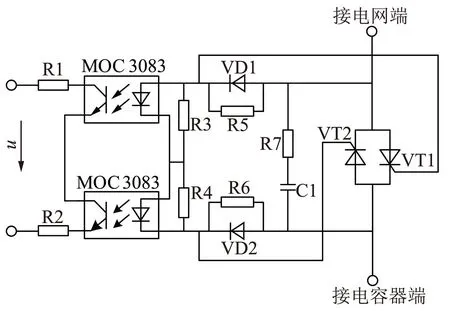
VD1、VD2分别是二极管。图1 晶闸管驱动电路
图1中,主要包括2个限流电阻R1和R2,2个串联使用的MOC 3083型双向晶闸管驱动器(以下简称“MOC 3083”),2个均压电阻R3和R4,电阻-电容器吸收电路与2个反向并联的单相晶闸管(VT1、VT2)。MOC 3083的输入与输出通过光电隔离,其内部已经集成了过零检测电路,一般情况下能正常过零投入电容器。在400 V交流系统中,需通过串联多个MOC 3083来解决单个器件耐压水平不足的现象,使用时需要在每个MOC 3083中并联均压电阻,保证MOC 3083在阻断状态能实现电压均衡。由文献[8]可知,在正常情况下,MOC 3083能够准确在过零点触发晶闸管投入电容器,但在实际配电网中,电网谐波非常复杂不定,特别在电网电压严重畸变、du/dt增大时,MOC 3083容易受到干扰,发生误动,导致电容器可能不在过零点投入电网,造成冲击涌流过大,容易损坏晶闸管与电容器。因此,取消采用MOC 3083,对晶闸管的驱动电路进行修改,提高晶闸管的可靠触发,利于提高TSC无功补偿运行的可靠性。
2智能型TSC的控制系统结构
智能型TSC的控制系统结构如图2所示。

QF—断路器,circuit breaker的缩写。图2 控制系统结构
从图2可看到,智能型TSC控制系统的结构主要包括主控制芯片、三相电压电流的采样模块、数据存储模块、与个人计算机通信的模块、时钟电路及键盘与显示。每个电容器组均由单独1个调节器控制,该调节器内部主要包括单片机控制芯片、过零检测电路与晶闸管驱动电路。整套控制系统的工作原理:通过控制器采集电网的三相交流电压和电流,由控制器计算出电压和电流的有效值、有功功率与无功功率、功率因数等参数,根据控制策略判断此时电网是否需要补偿无功功率,如果需要进行无功补偿,则控制器通过输入、输出口选中相应的调节器,由调节器负责电容器的投切。调节器收到投入电容器命令后,需要通过过零检测电路检测晶闸管的过零信号,当单片机检测到晶闸管的过零信号时,单片机输出驱动信号触发晶闸管投入电网,完成电容器的投入过程;当调节器收到切除电容器命令时,只需去掉晶闸管的驱动信号,晶闸管在承受电网反压时候将自然关断,完成电容器的切除。
2.1调节器中晶闸管可靠触发的改进方案
针对MOC 3083的缺点,提出了新的改进方案,如图3所示。
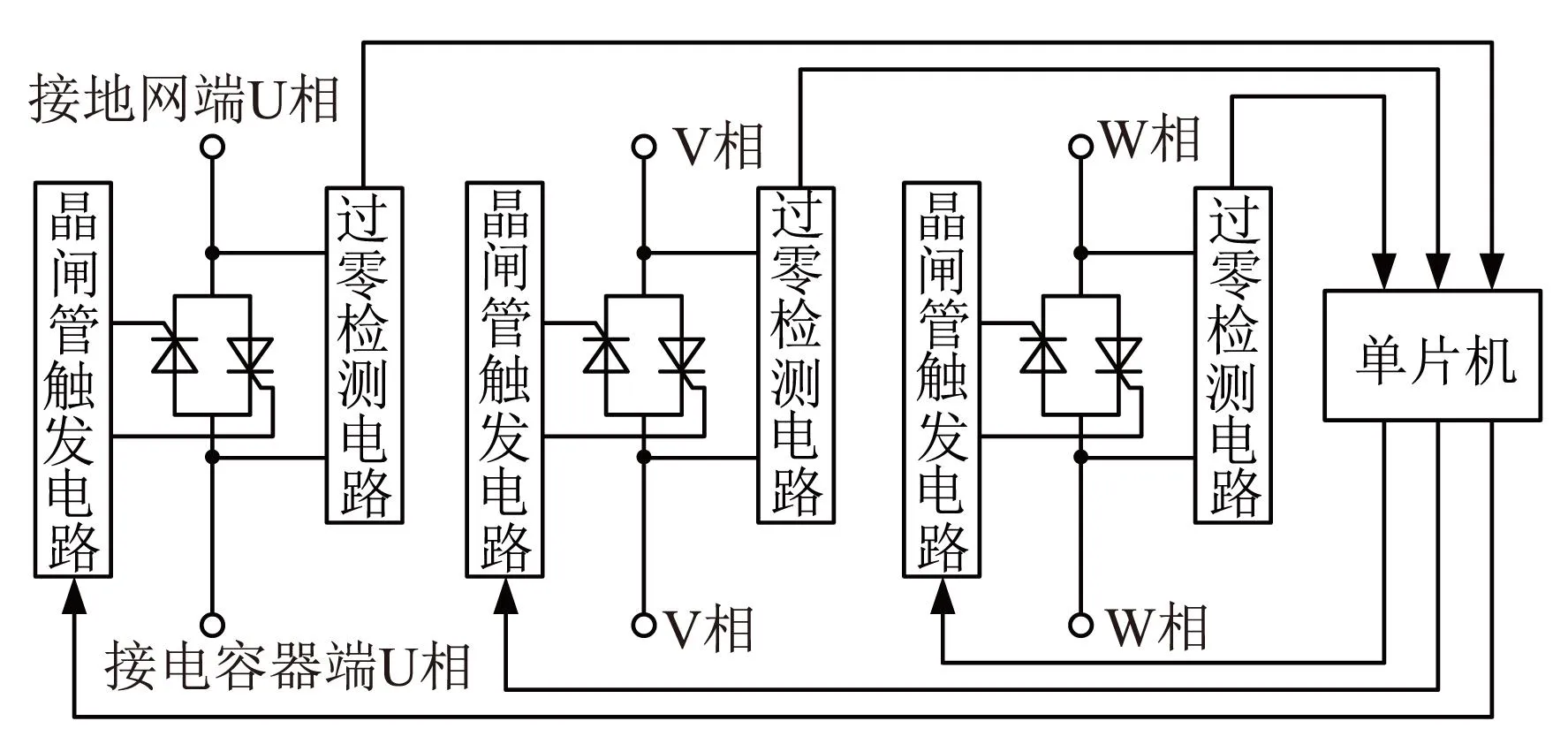
图3 改进的调节器方案
图3中,接地网端的U、V、W相接在电网侧,接电容器端的U、V、W相接在电容器侧。新方案不再使用MOC 3083作为晶闸管的驱动器件,而是重新设计过零检测电路与晶闸管的驱动电路,采用单片机控制方式来实现晶闸管的可靠触发。当总控制器进行电压、电流采样与数据处理时,各组调节器均处于待命状态;当收到由总控制器发来的投入电容信号时,调节器的单片机此时等待过零电路的过零信号,在单片机收到过零信号后,通过晶闸管驱动电路触发晶闸管导通,实现过零投切。
2.2过零检测电路
电容电压不能发生突变,当电容器电压和电网电压差较大时,会产生较大的冲击电流。根据《广东电网公司低压无功补偿装置技术规范》的规定,冲击涌流应限制在电容器额定电流的2倍以内,为使电容器投入时不引起较大的涌流,必须选准晶闸管触发的理想时刻,即保证晶闸管导通时电网电压与电容器电压大小相等、极性一致[9]。因此,实现过零投切就需要改进过零检测电路,如图4所示。

图4 过零检测电路
图4中,过零检测电路接在晶闸管两端,接电网端在网侧,接电容端在电容器侧,R1和R2为限流电阻,VD3和VD4主要起到钳位的作用,电容器C2和C3的两端电压不超过6.8 V。主要工作过程:接电网与结电容器两端为交流正弦波,在正半波时,电流经二极管VD2向电容器C3充电,使电容极性为上正下负,可将C3看成PNP三极管Q3、Q4的电源,等到正半波过零,触发三极管Q3、Q4导通,继而触发光耦合器P2导通,将输出电压拉低;同理,在负半波时,当电压过零时,光耦合器P1导通,将输出电压拉低。由此,光耦合器P2负责检测正向过零点,光耦合器P1负责检测负向过零点,在输出端端检测到低电平时就是接电网与接电网两端过零点。
2.3晶闸管的驱动电路
图5所示为U相晶闸管的驱动电路,采用脉冲变压器来触发双向晶闸管,当单片机检测到控制器发出的投切命令,且捕捉到U相过零信号后,就由单片机发出触发信号,通过控制3个三级管的通断来改变变压器的的极性,达到驱动晶闸管的目的。图5中,接电网端连接到U相母线,接电容器端连接到电容器的U相。

图5 晶闸管驱动电路
工作过程:当输入端为低电平时,三极管Q2和Q3截止,Q1导通,电流方向为图5中箭头所指实线,电源通过Q1向电容器C1和C2充电,电流从脉冲变压器自上而下流动,此时VD1导通驱动左边晶闸管;当输入端为高电平时,三极管Q1和Q3导通,Q1截止,电流方向为图5中箭头所指虚线, C1和C2放电,电流从脉冲变压器自下而上流动,此时VD2导通驱动右边晶闸管,如此通过C1和C2的充放电方式间接驱动晶闸管。
3实验波形与分析
为验证上述晶闸管过零电路与晶闸管驱动电路的可行性,通过数字示波器,测试过零检测电路的准确性以及测试电容器在投入时的冲击电流。图6记录了过零检测信号与过零投入电容时的各种波形。
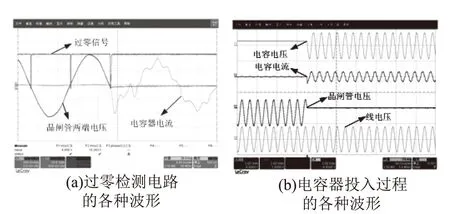
图6 实验波形
图6(a)中,过零电路可准确检测晶闸管两端电压的过零信号。当电压差过零时输出低脉冲时,过零检测电路的准确性良好,此外,从电容器的电流波形还可以看出,当晶闸管两端电压差接近零时投入电容,基本没有出现冲击涌流;图6(b)中,当电容器两端电压与线电压大小相等,方向相同时,即晶闸管电压为零时投入电容器,电容电流的冲击涌流不大,如果能实现极准确的过零投入,冲击涌流为零,现实了因元器件参数的特性以及单片机指令周期的限制,电容器无法实现真正的过零,只是在允许的范围内,将冲击涌流控制最小。
4结束语
随着低压无功补偿装置的普遍应用,配电网电压稳定,传输线损耗降低,但因大量使用简单的MOC 3083型调节器,在复杂的配电网中无法正常、可靠地工作。因此,本文设计了过零检测电路和晶闸管驱动电路来取代可靠性不高的MOC 3083,充分发挥了光耦的特性,巧妙改进晶闸管触发电路。改进后的调节器的优点:准确捕捉晶闸管两端的过零点;可靠触发晶闸管;使用单片机控制,更具智能化。对低压无功补偿调节器的晶闸管触发电路的改进,解决了目前调节器中晶闸管触发的可靠性问题,提高低压无功补偿运行的可靠性。
参考文献:
[1] 罗书克,张元敏. 低压配用电系统两级无功补偿控制研究[J]. 电力系统保护与控制,2014,42(16): 103-107.
LUO Shuke,ZHANG Yuanmin. Study of Two-stage VAR Compensation in Low Voltage Distribution System [J]. Power System Protection and Control,2014,42(16): 103-107.
[2] 孔令凯,张爱玲,曹森. 特高压晶闸管阀运行试验控制保护系统研发[J]. 电力系统保护与控制,2013,41(11): 80-84.
KONG Lingkai,ZHANG Ailing,CAO Sen. Development of Control and Protection System for Operational Test of UHVDC Thyristor Valve [J]. Power System Protection and Control,2013,41(11): 80-84.
[3] 王士政. 电力系统控制与调度自动化[M]. 北京:中国电力出版社,2012.
[4] 李翼铭. 电力系统的无功补偿调度研究[J]. 电力系统自动化,2010(4):56-58.
LI Yiming. The Study of Power System Reactive Power Compensation and Dispatching[J]. Power System Automation,2010(4):56-58.
[5] 李虎威. 10 kV电容器组同步投切装置设计与实现[D]. 成都:西南交通大学,2011.
[6] 栗然,张孝乾,唐凡,等. 风电场容量比对无功补偿容量的影响研究[J]. 电力系统保护与控制,2012,40(4): 21-25.
LI Ran,ZHANG Xiaoqian,TANG Fan,et al. Study on Effect of Wind Farm Capacity Ratio on the Capacity of Reactive Power Compensation [J]. Power System Protection and Control,2012,40(4): 21-25.
[7] 陈军辉. 基于TMS320F2812的低压静止无功发生器的研制[D]. 南宁: 广西大学,2009.
[8] 孙福泉,张喜军,焦翠坪, 等.基于MOC 3083的误触发原理分析及改进方法[J]. 电力电子技术,2009,43 (1):52-54.
SUN Fuquan,ZHANG Xijun,JIAO Cuiping, et al. Principle Analysis and Improvement Method Based on MOC 3083 [J]. Power Electronics,2009,43 (1):52-54.
[9] 许红兵. 并联电容器无功补偿的经济运行[J]. 电力电容器,2006,27(2): 12-14.
XU Hongbing. Analysis on Economic Operation of Shunt Capacitor for Reactive Power Compensation[J]. Power Capacitor,2006,27(2): 12-14.
Analysis and Research on Reliable Trigger of Intelligent TSC Thyristor
CHEN Xingcan, CHENG Hanxiang,PENG Pai
(Faculty of Automation, Guangdong University of Technology, Guangzhou, Guangdong 510006, China)
Abstract:In allusion to problems that it is easy to cause malfunction by using MOC 3083 bidirectional thyristor driver of low-voltage reactive power compensation regulator for triggering the thyristor and drive circuit is easy to be damaged, this paper introduces redesign on zero cross detection circuit and drive circuit of the thyristor by centering on the singlechip, fully making use of characteristic of optical coupler and using solenoid drive for driving the thyristor instead. Relevant experimental results indicate that the improved regulator which has small inrush currentcould correctly detect zero crosssignals at both sides of the thyristor and put the capacitor into zero cross point. The improved regulator has high operation reliability and stable performance.
Key words:reactive power compensation; MOC 3083 bidirectional thyristor driver; singlechip
收稿日期:2015-10-15修回日期:2016-02-04
doi:10.3969/j.issn.1007-290X.2016.05.015
中图分类号:TM714.3
文献标志码:B
文章编号:1007-290X(2016)05-0082-04
作者简介:
陈杏灿(1990),广东汕头人。在读硕士研究生,主要研究方向为电力系统自动化。
程汉湘(1957) ,男,湖北武汉人。教授,工学博士,硕士生导师,主要研究方向为电力系统自动化及电力电子技术。
彭湃(1989),湖北天门人。在读硕士研究生,主要研究方向为电力系统自动化。
(编辑王夏慧)
猜你喜欢
四川电力技术(2022年6期)2023-01-31
现代信息科技(2022年20期)2022-11-17
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
舰船电子工程(2019年11期)2019-11-28
山东冶金(2019年5期)2019-11-16
宇航计测技术(2018年3期)2018-09-08
通信电源技术(2016年6期)2016-04-20
汽车与新动力(2015年1期)2015-02-27
云南电力技术(2014年4期)2014-03-16