无地面控制的海岸带航空遥感测量精度研究
——机载LiDAR用于胶州湾海岸带测量
2016-06-21 07:53:36张汉德邵成立蒋旭惠
测绘工程 2016年7期
韩 磊,张汉德,邵成立,蒋旭惠
(1.青岛市勘察测绘研究院,山东 青岛 266033;2.中国海监北海航空支队,山东 青岛 266061)
无地面控制的海岸带航空遥感测量精度研究
——机载LiDAR用于胶州湾海岸带测量
韩磊1,张汉德2,邵成立1,蒋旭惠2
(1.青岛市勘察测绘研究院,山东 青岛 266033;2.中国海监北海航空支队,山东 青岛 266061)
摘要:海岛海岸带地区,地理位置特殊,不便地形测量;对该区域进行航空遥感测量时,由于区域内大部分为低纹理地区,进行同名点匹配有困难,且不易进行野外控制点加密测量。机载(LIDAR)因其发射的激光脉冲能部分地穿透树林遮挡,具有一定的透水性能,能获得滩涂地区的高程,并且其系统配备的全球定位系统(GPS)和惯性测量系统(INS),使其定位精度得到很好的保证。文中选用胶州湾沿岸为试验区域,采用Leica公司的ALS70在低潮时进行测区的数据获取,并对结果进行精度分析,得出在该区域采用机载激光扫描系统ALS70进行无野外控制点加密的航空遥感,成果精度能满足1∶5 000比例尺测图的需要。
关键词:机载LiDAR;数字高程模型(DEM);数字正射影像(DOM)
机载LiDAR系统是一种集激光测距、GPS和INS3种技术于一体的系统,用于获得数据并生成精确三维地形(DEM)。这3种技术的结合,可以高度准确地定位激光束打在物体上的光斑。机载LiDAR的发展和应用已经有几十年的历史,在地形测绘、环境检测、三维城市建模等诸多领域应用广泛,这项技术的出现是继GPS以来在遥感测绘领域的又一场技术革命[1-4]。机载LiDAR进入我国以来,在相关行业也得到了充分的应用与发展。其中,在海岛、海岸带的航空遥感测量方面已经有了相关案例。在海岛海岸带调查和江苏省沿海滩涂、海岛礁的1∶10 000比例尺的测绘中取得了成功的应用[5-6]。
由于海岸带地区经济发展迅猛,对地形图和相关测绘成果的精度要求越来越高。本文用机载LiDAR系统ALS70对海岸带进行1∶5 000比例尺的航空遥感测量,数据处理采用无地面控制点的处理方式,相片定位完全采用机载GPS和地面基站的差分解算结果以及惯性测量单元的测量结果,分析了其成果数字正射影像图和数字高程模型的精度。
1实验概况
1.1总体技术流程
技术流程见图1。
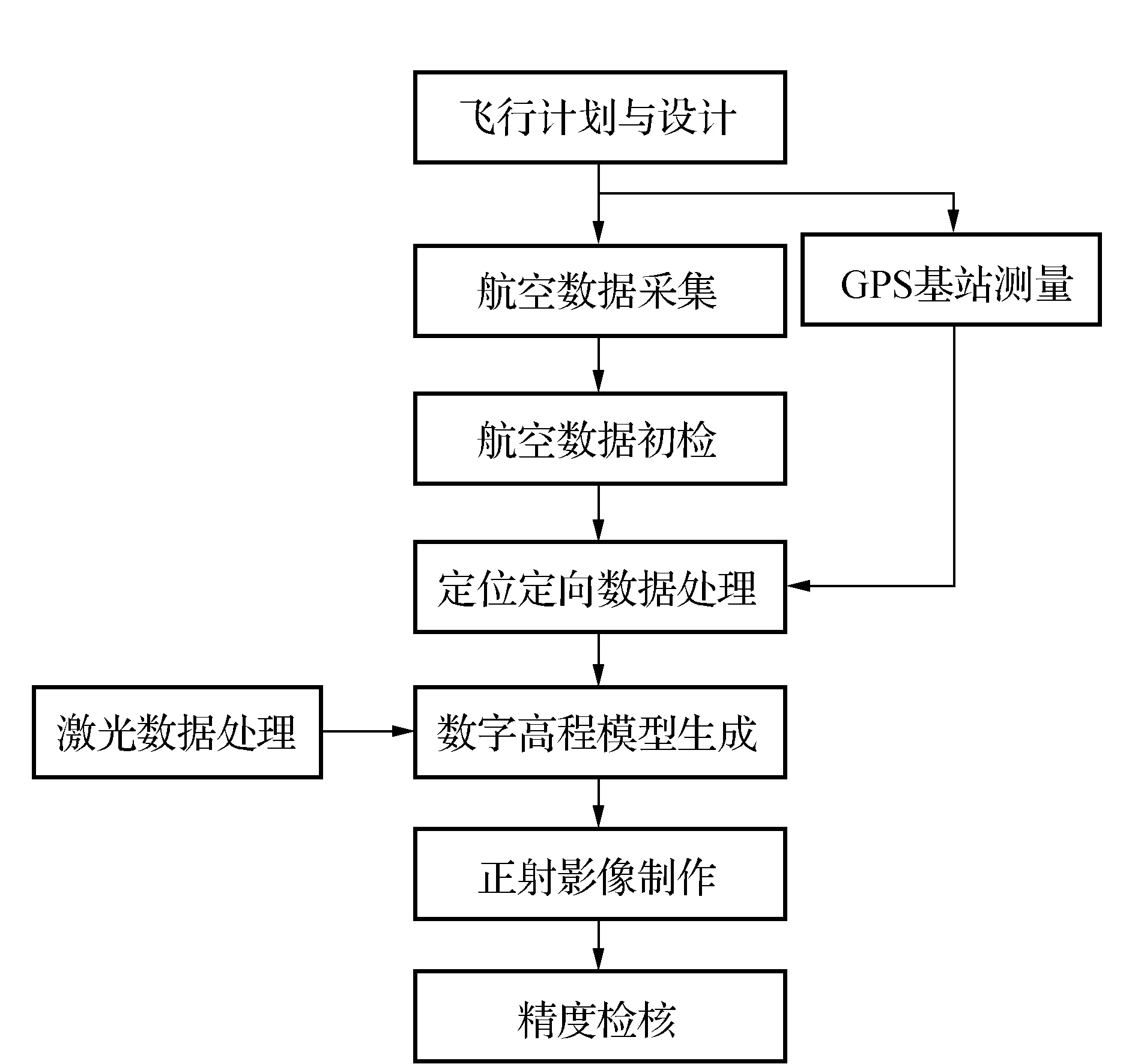
图1 技术路线
1.2测区选择
胶州湾为封闭性海湾,且大部分河流从海湾北部入海,造成海湾的北部特别是西北部和东北部波浪作用很弱,而入海物质相对又较多,形成以潮汐作用为主的海岸地貌单元。其北部湾顶多为宽坦的粉砂淤泥质潮滩,仅红岛附近有基岩海岸、砾石滩海岸分布[1],此次实验选择胶州湾北部区域为实验区域。
1.3执行情况
1.3.1数据获取设备
本次数据获取采用的设备为机载激光扫描集成系统ALS70-HP,系统由激光扫描仪LS70、系统控制箱SC70、操作终端OC52和相机系统RCD30组成,如图2所示。传感器位置与姿态参数获取设备为IPAS20。

图2 ALS70-HP系统组成
1.3.2数据获取
1)航线设计。飞行前对飞行区域及其邻近地区进行相关资料收集与实地勘查,主要内容:飞行区域的行政区划、通讯、交通和自然地理等情况;飞行区域及邻近地区内各类型地面控制点、GPS水准点的情况;飞行区域的地形类别、地面覆盖类型、植被覆盖密度、坡度、开发现状等。并对飞行区域及其周边区域的潮汐资料收集。
2)飞行时间确定。根据调查区域的海洋观测站分布情况,搜集附近2~3个海洋观测站5~7 d的验潮资料,分析潮汐变化规律,推算5~7 d低潮时,根据该时间和日照条件制定飞行时间安排,为保证低潮时间的准确、可靠,应依照当天的潮汐实际观测值,对潮汐预测做出修正。在该实验中,根据实验测区待测范围,基于海事服务网潮位预报,推算了低潮时间窗口。
3)数据获取。按照时间窗口进行数据获取飞行,数据获取的同时,在测区范围内的一个已知地面点架设GPS进行静态观测,在后期数据处理时,将其数据与机载GPS数据进行差分解算,从而提高机载数据的定位精度。若测区内无已知高精度的地面控制点,则可以在GPS信号好的地方架设GPS进行同步观测,后期该地面点的坐标则可通过精密单点定位技术获得。
该架次飞行结束后,获取的数据包括:数字影像数据、激光点云数据、定位定向数据3组机载传感器数据和1组地面GPS基站数据;飞行高度为3 000 m,获取的数字影像分辨率为0.36 m。
1.3.3数据质量检查
1)飞行质量检查。对获取的数据进行了全面的质量检查。航线设计合理,获取的影像数据覆盖全测区,没有航摄漏洞,航向重叠率为60%~70%;旁向重叠率为30%~35%,地面分辨率为0.36 m,最大旋偏角没有超过10°,符合规范要求。
2)影像数据质量检查。对获取的数字影像进行了质量检查,影像清晰,反差适中,色彩饱和度好,地物有较丰富的层次,能辨别与地面分辨率相适应的细小地物影像,获取的航空影像资料质量符合规范要求。
3)IMU/GPS数据质量检查。对机载的定位数据进行了质量检查。下载IMU/GPS数据并存储,进行预处理后,进行检查分析。经检查,IMU数据正常、连续;Event Mark值正常,不存在重号、漏号。GPS数据无失锁现象发生,进行差分GPS处理计算,观测质量、共星情况和解算精度均满足精确后处理的要求。
4)激光(LiDAR)数据质量检查。下载该架次的原始激光点云(Lidar)数据,使用ALS PP软件将激光数据进行处理,对Lidar数据进行格式转换,同时将空间信息赋予Lidar数据。经检查,该架次的LiDAR数据获取不存在遗漏或中断;激光点分布合理、不存在漏扫的现象;LiDAR点云覆盖满足要求;航线间LiDAR数据的重叠率满足要求;航线数量、飞行高度、扫描角等参数与计划一致,文件数量与航线长度相符合;将LiDAR数据分别按回波次数、高程、航线、强度、距离进行显示,不存在异常。任意选取一个剖面,剖面上的Lidar数据立体分布未显示异常,航线轨迹生成和激光数据预处理能顺利进行。
5)地面GPS基站数据初检。地面GPS基站数据主要检查GPS数据记录的起止时间、卫星数量、DOP值等信息,经检查:采用预报星历,进行GPS观测质量检查,其中高度角在10°以上的有效观测量大于观测量的95%,符合要求;测距观测质量MP1和MP2小于0.5 m;采集时段与飞行时段符合,GPS基站数据的采集频率符合要求。
1.3.4数据处理
1)定位定向数据处理 。机载IPAS设备主要获取数据的定位定向数据,包含GPS数据与IMU数据。IMU/GPS数据处理包括数据分离、GPS数据差分、数据拟合、外方位元素生成几个步骤。根据IMU/GPS惯性导航系统记录的定位定向数据,与地面GPS基站的数据进行联合解算,得出具有更高精度的定位定向信息。并由此计算出航空相片的6个外方位元素。
2)数字高程模型生成。机载LiDAR设备将三维激光扫描仪和定位定向系统相结合,以发射激光束并接收回波的方式,获取目标三维信息,主要获取的数据为激光点云数据。激光点云数据经过噪声点去除、地表覆盖物点(建筑物、植被等)分离后得到地面激光返回点的集合,从而生成地表的数字高程模型。在实验中,激光数据的处理分为3个步骤:原始数据的格式转换、激光点云分类和DEM生成。3个步骤分别在ALS PP、Terra Solid及Erdas Imagine软件中完成。
3)正射影像制作。采用ALS70系统配备的IPAS惯性导航系统,能准确计算出相机曝光瞬间相机的姿态数据,直接得到相片的6个外方位元素,较传统的摄影测量生产减少了相对定向的步骤,内定向后可直接引入相片的6个外方位元素进行绝对定向;系统配备的LiDAR系统,能直接获得地面高程模型,DEM生成步骤简单;将DEM数据直接引入正射变换,得到正射影像,整个影像数据处理工作流程自动化程度高。如图3、图4所示为所得到的正射影像的局部细节图。

图3 正射影像图区域1

图4 正射影像图区域2
1.3.5精度检核
对整个测区布设一定密度的检核点,到实地进行GPS测量。据此对处理得到的数字正射影像图(DOM)和数字高程模型(DEM)的精度进行评价,分析成果是否满足1∶5 000比例尺测量成果的要求。
1)DOM平面精度。利用外业检测点对DOM影像成果进行精度检测,共用到点63个,DOM地物点相对于外业检测点的最小误差为0 m,最大误差值为1.190 9 m。
DOM平面点位中误差[8]:
(1)
式中:RMS为DOM平面点位中误差;n为检查点个数;xi,yi表示DOM影像上检查点的坐标;Xi,Yi为检查点的实地坐标。
依据中误差公式,计算出DOM检查点较差中误差为0.46 m,如表1所示。
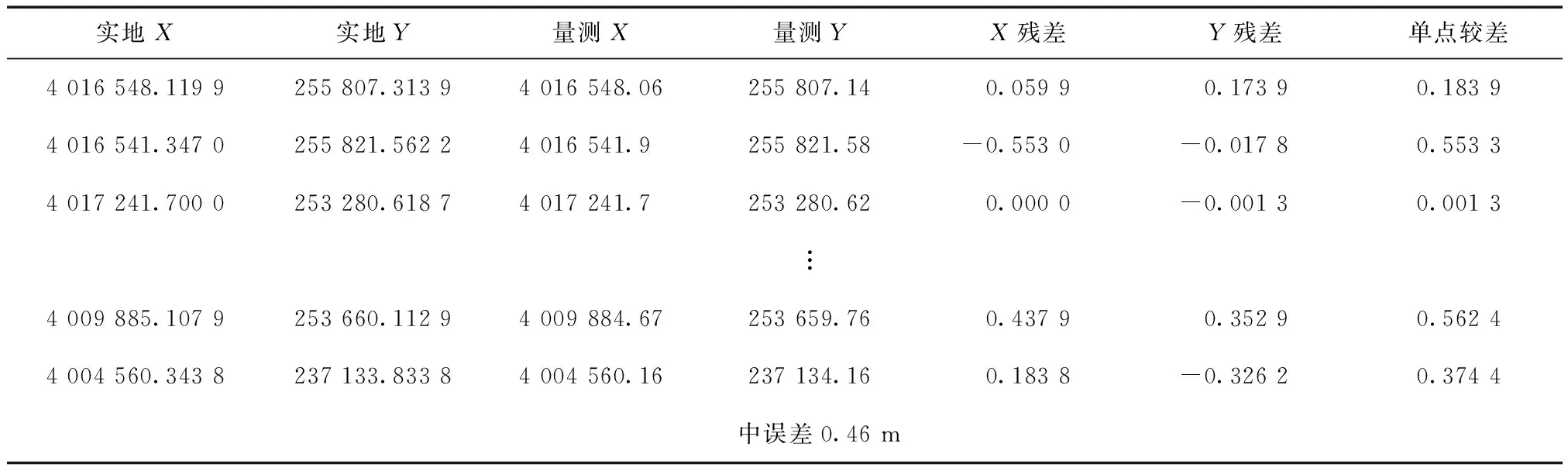
表1 DOM精度检查表
2)DEM精度检查。利用外业检测点对DEM成果进行精度检测,共用点73个,其中高程最大误差0.233 7 m;最小误差0.000 2 m。
DEM高程中误差依据下式进行计算[8]:
(2)
式中:RMS为DEM高程中误差;n为检查点个数;zi为DEM影像上检查点的坐标;Zi为检查点的实地坐标。
DEM数据成果立体模型符合情况良好,高程中误差为0.11 m,如表2所示。

表2 DEM精度检查表
2结束语
此次试验中,后期进行数据处理时,完全采用机载GPS与地面基站的差分解算结果和惯性测量单元的测量记录进行一系列的处理得到激光点云和数字影像的坐标和方位。实验结果表明这完全能满足1∶5 000比例尺测图的要求。若测区绝大部分为滩涂,无已知地面点进行基站架设,可以考虑采用精密单点定位方法获得地面基站的坐标,将其与机载GPS进行差分解算,以提高整个架次的成果精度[5]。若要对海岸带区域进行更大比例尺的测图,则需要降低飞行高度,增加航带重叠度,放慢飞行速度,以保证激光点云有足够的密度。
海岸带滩涂地区由于地形复杂,人力通常难以到达,而且即便人力到达,潮汐时间的要求对测量速度和测量质量都提出很高的要求,因此,滩涂地区的一直是地形图测量领域的难点区域,机载激光雷达的机动性、测量精度提供一个很好的解决办法。机载LiDAR正在包括海岸带区域在内的传统测量难以完成的领域内发挥着越来越大的作用。
参考文献:
[1]张志恒.胶州湾海岸带利用现状与评价[D].青岛:中国海洋大学,2009.
[2]WEHR A,LOHR U.Airborne Laser scanning:an Introduction and Overview[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54:68-82.
[3]CHARLES K T.Future trends in LiDAR[C].ASPRS Annual Conference,Denver,2004.
[4]刘经南,张小红.激光扫描测高技术的发展与现状[J].武汉大学学报(信息科学版),2003(4):132-136.
[5]蒋旭惠.精密单点定位技术在海岛海岸带航空遥感调查中的应用[J].海洋技术,2011(2):18-21.
[6]袁豹.基于平面约束的机载LiDAR航带平差方法研究[J].测绘工程,2015,24(10):27-30.
[7]史照良,曹敏.基于LiDAR技术的海岛礁、滩涂测绘研究[J].测绘通报,2007(5):49-52.
[8]陈梦雪,刘洪庆,许世城.LiDAR技术在钱塘江海塘工程安全监测上的应用研究[J].测绘工程,2015,24(9):44-47.
[9]徐祖舰,王滋政,阳锋.机载激光雷达测量技术及工程应用实践[M].武汉:武汉大学出版社,2009.
[10] 王宏涛,王变利.融合LiDAR和多光谱影像的建筑物自动检测[J].测绘科学,2015,40(8):64-67.
[11] 武汉测绘科技大学《测量学》编写组.测量学[M].北京:测绘出版社,2000.
[责任编辑:李铭娜]
Research of the precision on aerial remote sensing in the coastal area without ground control points—application of aerial LiDAR to Jiaozhou Bay
HAN Lei1,ZHANG Hande2,SHAO Chengli1,JIANG Xuhui2
(1.Qingdao Geotechnical Investigation and Surveying Institute,Qingdao 266033,China;2.Northern Sea Air-Borne Detachment of China Marine Surveillance,Qingdao 266061,China)
Abstract:Topographic surveying in the island and coastal zone is very hard because of its special geographical position and properties.During aerial remote sensing in this kind of area,point matching and ground control points measurement are difficult to carry out owing to the low texture and too many rocks or tidal flat.The Light Detection and Ranging system (LIDAR) can emit the pulse which can penetrate wood block and go through water to a certain extent. So it can get the elevation of the coastal area. The positioning precision can be guaranteed as for the equipments such as Global Positioning System (GPS) and Inertial Navigation System (INS). Due to the good penetration performance and positioning capability, LiDAR has been applied to the island and coastal zone surveying since its appearance. In this paper, Jiaozhou Bay is chosen as the experimental region. Airborne LiDAR ALS70 is adopted to take the data acquisition at the time of low tide. The data processing flow is studied. The result indicates that, ALS70 can satisfy the precision requirement of 1∶5 000 scale surveying in coastal area without ground control points.
Key words:aerial LiDAR;digital elevation model(DEM);digital orthoimage(DOM)
DOI:10.19349/j.cnki.issn1006-7949.2016.07.008
收稿日期:2015-04-14;修回日期:2015-10-10
作者简介:韩磊(1981-),男,工程师,硕士.
中图分类号:P237
文献标识码:A
文章编号:1006-7949(2016)07-0036-04