基于灰度共生矩阵的草地未割区域分界线提取
2016-06-18 05:28童逸舟
杭州电子科技大学学报(自然科学版) 2016年2期
童逸舟,刘 瑜
(浙江理工大学机械与自动控制学院,浙江 杭州 310018)
基于灰度共生矩阵的草地未割区域分界线提取
童逸舟,刘瑜
(浙江理工大学机械与自动控制学院,浙江 杭州 310018)
摘要:利用草地的灰度图像计算灰度共生矩阵,通过比较“自相关”、“对比度”、“能量”、“均匀性”4个不同的特征值矩阵,提取出纹理分割效果最佳的二值图像,然后将二值图横向分割成若干宽度相同的横条,通过计算单条横条内黑色像素点的占有比确定历遍轮廓大小进而找出分割点坐标,最后将每个横条分割点用直线连起来.实验表明,利用灰度共生矩阵能较好地将未割草地的纹理特性提取出来,并通过后期算法处理能相对准确地进行分界线的提取.
关键词:草地分割;灰度共生矩阵;特征值矩阵;历遍轮廓
0引言
随着社会经济的发展,城市绿化面积有了显著地提高.然而公园、小区、足球场等公共绿地需要进行定时维护,其中,草地的修剪工作最为繁琐[1].为了提高作业效率,减少劳动力成本,近几年来各国的电子工业技术行业、自动化行业都尝试将传统的手动割草机升级为全自动智能割草机器人.在研究智能割草机器人的过程中,路径规划算法的制定直接影响了机器人工作的效率和精确度.一般的路径规划是指两点之间直线最短的最优路径选择,割草机器人的路径规划则需要做到高效地、无遗漏地全区域覆盖[2].国内外现有的技术包括利用栅格法得到的区域路径规划、基于模糊控制的全区域填充法等优化算法、使用离散的构造空间向量法的路径规划等[3].但这些路径规划方法多依赖前期的算法编写与工作过程中的自适应学习,一旦周围环境发生改变则需要重新进行学习,缺乏智能性.与此同时,机器人视觉技术的普及使图像处理技术应用到越来越多的地方.其中作为基本属性之一的纹理特征更是广泛用于图像分类、图像识别、图像检索、图像分割和合成等领域中[4].目前基于纹理特征的图像分割技术主要有灰度共生算法、基于Gabor滤波器的纹理图像分割[6-7]、基于离散沃尔什变换的纹理图像分割等[8-9].综上所述,本文提出了一种以灰度共生矩阵的特征参数对草地灰度图进行纹理分割的方法,并通过对分割后的二值图像的轮廓历遍分析,拟合出对应的分割线,最终实现智能路径规划.
1灰度共生矩阵理论
1.1灰度共生矩阵
灰度共生矩阵是图像纹理特性研究的一种常用方法,是通过对图像上一定位置关系的像素对的灰度值进行整体统计得到的[9].假设图像由M×N个灰度点组成,其灰度级数为H.任意一像素点(x,y)以及偏离它的另一点(x+Dx,y+Dy).如果f(x,y)=i,f(x+Dx,y+Dy)=j,则记对应的灰度级对为(i,j).遍历整个图像,统计各灰度级对的个数,得到满足一定空间关系的H×H灰度共生矩阵为:

(1)

图1 灰度对位置关系
根据两点的距离l及与坐标横轴的夹角θ不同,可以得到各种间距及角度的灰度共生矩阵p(i,j,l,θ).如图1所示,当Dx=1,Dy=0时,像素对呈水平方向,即0°扫描,步长为l=1,对应p(i,j,1,0);当Dx=1,Dy=1时,像素对呈右斜对角方向,即45°扫描,步长l=1,对应p(i,j,1,45°);当Dx=0,Dy=1时,像素对呈垂直方向,即90°扫描,步长l=1,对应p(i,j,1,90°);当Dx=-1,Dy=1时,像素对呈左斜对角方向,即135°扫描,步长l=1,对应p(i,j,1,135°).
图2(a)为一个简单的原始图像矩阵(4×6像素),经过步长为l=1的0度扫描,统计出相应的灰度对个数,生成一个灰度级数为8的灰度共生矩阵,如图2(b)所示.
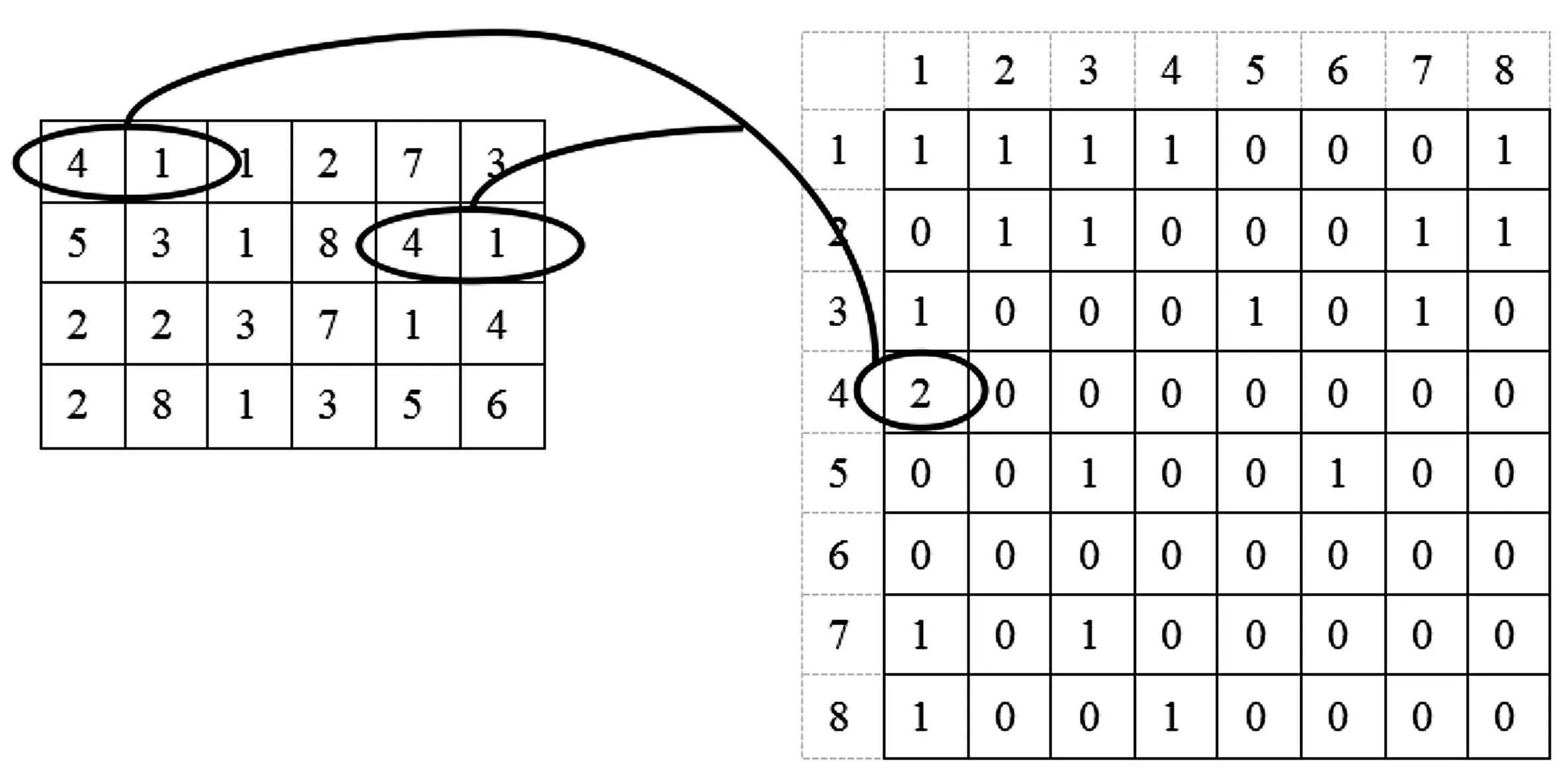
图2 原始图像对应的灰度共生矩阵
但是仅灰度共生矩阵还没有包含图像的纹理特征信息,若要准确的反映出图像的纹理信息还需把灰度对个数统计转换成相应的出现概率μ(i,j),又称归一化[12].

(2)

1.2灰度共生矩阵的特征值
基于上述产生的归一化灰度共生矩阵,可以用14种不同的标量来表示其特征,本文选取常用的5种[13]进行介绍:
1)自相关性(Correlation)体现了图像中像素点灰度值之间的相关性.当图像中所有像素点灰度值相等或相近时,自相关值大;反之,则自相关值小.
2)对比度(Contrast)反映了图像像素值的跳变快慢.目标像素点与背景之间的像素值差别越大,其Contrast值越大,纹理显示越清晰.
3)均匀性(Homogeneity)反映图像纹理分布的均匀程度,衡量图像局部纹理变化的大小.
4)能量(Angular Second Moment,ASM)反映了图像不同灰度值分布的均匀程度和纹理粗细的大小.如果生成的灰度共生矩阵上对应的灰度对个数相近,则ASM值偏小.同时,当灰度共生矩阵所包含的灰度对个数集中分布在一个区域,此时ASM值大.
5)熵(Entropy)熵是图像灰度集合的信息,是一个随机性质的量度.当灰度共生矩阵中所有像素值存在较大的随机性、其对应的灰度对个数近乎相等,Entropy值较大.
2基于灰度共生矩阵的草地纹理特征提取
在提取未割草地的分界线之前,首先要将图像根据不同的纹理特征进行分割,并通过实验比较筛选出最优纹理分割二值图.采用如下步骤:
1)灰度图像提取.未割过区域的草长势茂密,叶片成明显的条形状,纹理特征明显.而割过区域的草地相对平坦.两者存在较大的纹理差异.因此在图像的空间灰度矩阵中两个相隔一定距离的像素点之间在统计学上存在着一定的关系.取一张256×256像素的彩色草地图,将其转化成灰度图.一般灰度图的灰度级数默认为256级,然而灰度级数直接影响灰度共生矩阵的计算量.过大的灰度级数会造成上位机运算次数、占用内存大大增加.因此考虑到智能割草机器人的实时性和高效性,本文在计算灰度共生矩阵之前先将原始灰度图进行直方图均匀化后再除以16或者32取整,灰度级就从原来的256级压缩为8或者16级.从而在不影响图像整体对比效果的前提下大大提高了运算效率.
2)扫描角度选择.在计算灰度共生矩阵时,一般选取像素点夹角为0°,45°,90°,135°进行扫描统计.若单独计算每个角度形成灰度共生矩阵,最后由灰度共生矩阵得到的纹理特征值矩阵过于复杂且无法从理论高度去证明最优角度的存在.因此本文选取了4个角度对应生成的纹理特征值的平均值作为最后特征值矩阵的元素.
3)纹理特征值计算及特征图像映射.在纹理特征值的计算中并不是求整张图像的灰度共生矩阵,而是选取一定大小的滑动窗口对整张图像进行历遍计算操作.如图3所示,选取大小为3×3的滑动窗口,计算该窗口的灰度共生矩阵,将求得的特征值赋值给历遍窗口中心点像素,也就是原图第2行第2列的位置.这样第1个窗口的纹理特征值计算完毕,然后将历遍窗口向右移动1个像素点,用同样的方法可就求得第2行第3列的像素点的特征值,依次类推,整个图像将成为1个由纹理特征值构成的特征矩阵.而对于边界像素点的处理则采用将灰度图像外围补充若干圈像素点,如果是3×3的滑动窗口则补充1圈,5×5的滑动窗口则补充2圈,依次类推.外围像素点的灰度值与原灰度图最外层像素点灰度值一致.最后将这个纹理特征图像根据一定的方法映射为纹理特征二值图.
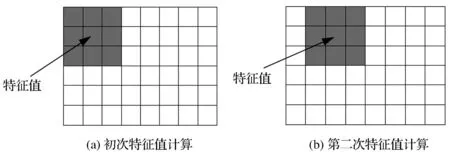
图3 特征值计算历遍过程
(1)特征值的选择.不同的特征值所体现的纹理特征不同,并且直接影响最后纹理分割效果的好坏.在处理草地图像的过程中本文在固定其他参数情况下选取了“自相关”、“对比度”、“能量”、“均匀性”4个具有代表性的特征值进行纹理特征二值图的映射.
(2)滑动窗口的选择.在纹理特征图像生成的过程中滑动窗口的选取十分的重要,如果选的过大将导致计算量和信息储存量变大,降低效率;但是过小又会导致纹理信息失真从而使最终处理效果变差.同时考虑到灰度共生矩阵生成的特征值需要在历遍窗口的最中心位置,这里对处理效果较好的特征值分别进行了4种窗口大小的历遍,分别为3×3,5×5,7×7,9×9.
4)图像的形态学处理.经过纹理分割的图像存在较多的杂质点,对后期处理造成了一定的影响.为了提高分割线提取的准确率,对纹理特征二值图进行膨胀腐蚀等简单的图像形态学处理来消除多余的杂质点,使得草地未割区域和割过区域的差别显得更明显.
3根据纹理特征二值图的分割线提取
根据人眼的视觉特性,当人们在看到最后纹理分割二值图时,脑中根据图中黑色像素点的分布位置和密集程度能判断出分割线的位置与大致的走势.参考这种视觉特性,本文在求得最优纹理分割二值图前提下通过一定的算法将分割线较为准确地通过机器语言提取出来.具体实施步骤如下:
1)先将整幅图像分成对称的左右2份,分别统计两边的黑色像素点个数.如果左侧个数大于右侧,则判定草地未割区域位于左半部分;如果右侧个数大于左侧,则判定草地未割区域位于右半部分;

3)根据第步骤2中所求的占有比例P拟定1个以T为长度的轮廓历遍器,其中T=PN.而由于像素点分布的离散性,如果仅仅选取上述T作为长度会产生较大的误差.因此适当增加轮廓历遍器的长度T1=(P+t)N,其中轮廓历遍器长度增加值t的范围为(0,0.3).随后从当前横条第一列像素点开始,以T1为单位长度,每次向右移动1个像素点并统计每个轮廓历遍器内黑色像素点的个数.当历遍完整个横条之后选取黑色像素点最多的轮廓历遍器IMAX.
4)根据步骤1的统计,如果草地未割区判定为左半部分,则选取轮廓历遍器IMAX右侧边缘中心像素点作为当前横条统计出来的分割点;相反,如果草地未割区域判定为右半部分则选取IMAX左侧边缘中心像素点作为分割点.
5)依此类推,将余下的横条做同样的历遍统计分别求出每一个横条所对应的分割点.最后将每个分割点依次用直线连接起来便形成所求的分割线.
4实验结果及分析
在Matlab2015a以及VS2010环境下联合编程,实现了文中所述的算法.
1)特征值筛选.分别选取了能量(Angular Second Moment)、均匀性(Homogeneity)、相关性(Correlation)、对比度(Contrast)4种不同特征值进行纹理特征二值图的映射,映射结果如图4所示.由图4可以看出,利用对比度和相关性作为特征值进行二值图映射对于草地这类密度高且颜色相近的RGB图不能起到很好的纹理分割效果,未割草的形状模糊且纹理分割效果差.对比能量和均匀性两个特征值,虽然均匀性二值图的纹理特征相比较能量二值图更加浓密,但是从后期去噪操作的角度考虑,均匀性二值图的噪点过于密集在后期图像形态学操作时容易将必要的纹理特征删去,造成最终效果图的失真.因此本文选取“能量”为参考特征值.
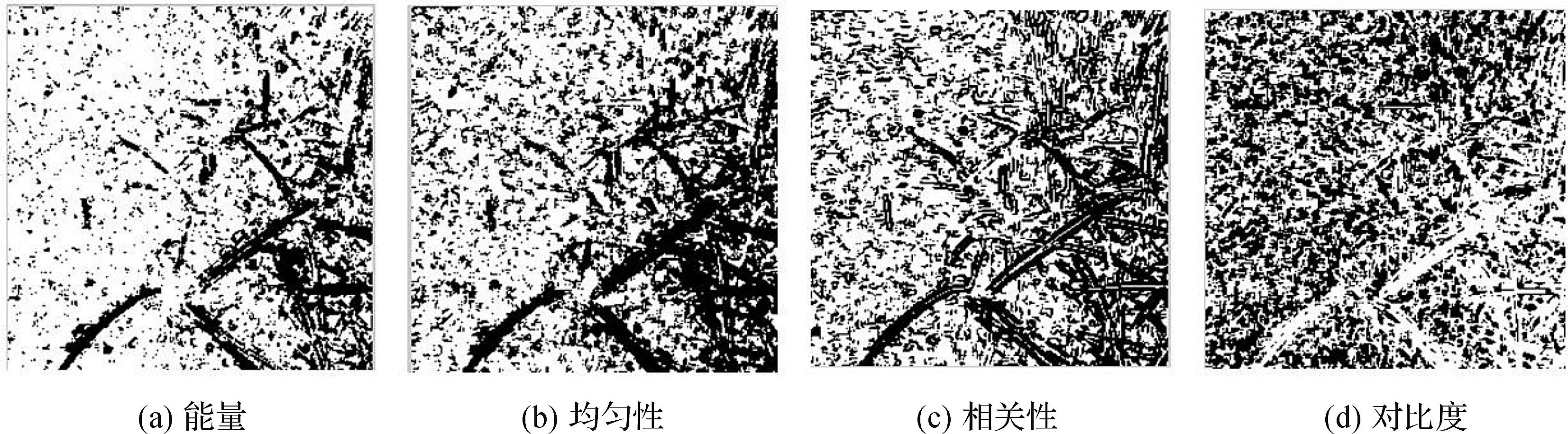
图4 不同特征值映射结果
2)历遍窗口选择.在此基础上,通过对不同的历遍窗口的分割结果进行比较,如图5所示.3×3的历遍窗口过度的展现了图像的细节特征,将一些不期望的纹理特征展现出来反而弱化了期望特征的显示.9×9的历遍窗口则相反将纹理特征过于笼统的显示在二值图上,不利于后期的分割线提取.相比之下,5×5和7×7历遍窗口的分割效果比较优秀,不同的是7×7窗口虽然拥有较少的噪点,但是图像纹理细节显示效果差.而5×5窗口纹理特征突出,图像纹理细节显示更加清楚,但存在的缺点是噪点多.但5×5窗口的噪点不同于特征值比较中的均匀性,其噪点细小且分散,在进行图像形态学操作的失真率低.因此本文择优选取5×5窗口作为参考历遍窗口大小.

图5 不同窗口大小映射结果
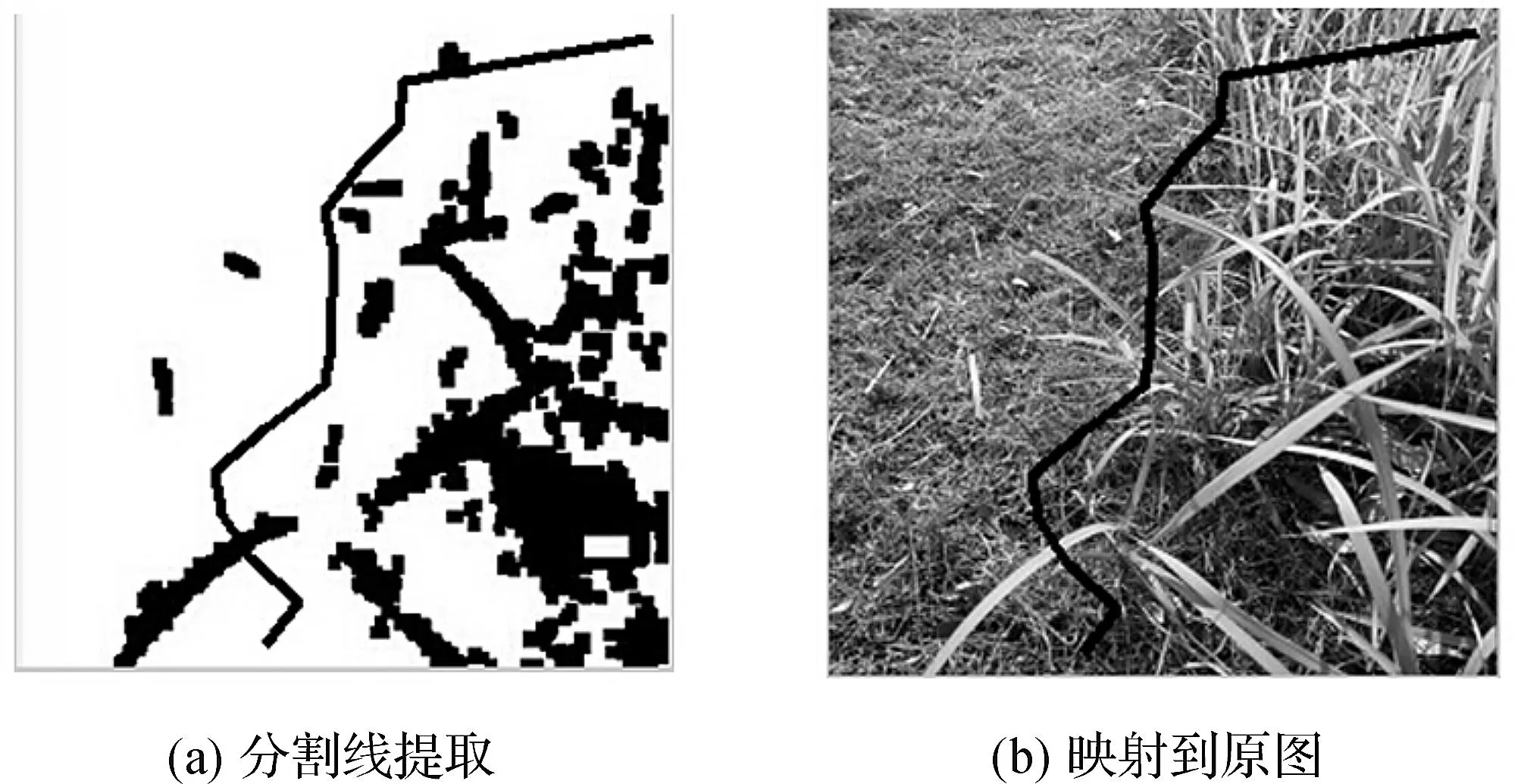
图6 最终分割线效果图
3)分割线的拟合.最终分割线效果图如图6所示.利用上述选定的参考特征值和参考历遍窗口大小映射出对应的最优纹理特征二值图,令横条宽度L=17(不能过小),轮廓历遍器长度增加值t=0.1,通过分割线提取算法确定每个横条中对应的纹理分割点并最终拟合出草地未割区域分割线,如图6(a)所示.将分割线对应到原图得到图6(b),从图6(b)可以看出,未割区域右下角部分未割草地稀疏,叶片纹理特征明显分割效果相对优秀.同时草地未割区域的单根草或者杂质对分割点的提取影响很小,从而提高分割线拟合的精度.但草在相对密集的右上部分,纹理分割效果的不明显导致了分割线拟合存在一定的误差,在以后的研究中的有待改进.
5结束语
本文基于灰度共生矩阵,通过比较不同特征值、滑动窗口大小等参数选取了最优纹理分割图像,并在此基础上根据人眼的视觉特性提出一种分割线拟合的算法.本算法适用纹理特征明显的草地,对于多而密的草皮分割效果并不优秀.同时在分界线的精度和算法的效率上还有待改进.利用图像采集和图像分析技术将草地割过区域与未割区域进行准确地划分,有助于割草机器人快速找到正确的工作区域并沿分割线进行高效率的割草.割草机器人通过循迹割草的方式大大提高了工作效率、避免相同区域重复工作、免除了繁琐的自适应学习、增强了割草机器人的智能性.
参考文献
[1]丛明,金立刚,房波.智能割草机器人的研究综述[J].机器人,2007,29(4):407-416.
[2]祖莉.智能割草机器人全区域覆盖运行的控制和动力学特性研究[D].南京:南京理工大学,2005.
[3]侯群群,王飞,严丽.基于灰度共生矩阵的彩色遥感图像纹理特征提取[J].国土资源遥感,2013,25(4):26-32.
[4]梅浪奇,郭建明,刘清.基于多特征的纹理特征提取方法研究与应用[J].交通信息与安全,2015,33(2):31-38.
[5]BHARATI M H,LIU J J,MACGREGOR J F.Image texture analysis:methods and comparisons[J].Chemometrics & Intelligent Laboratory Systems,2004,72(1):57-71.
[6]SAROJA G A S,SULOCHANA C H.Texture analysis of non-uniform images using GLCM[C]//Information & Communication Technologies (ICT),2013 IEEE Conference on.JeJu Island:IEEE,2013:1319-1322.
[7]LATHA Y L M,PRASAD M V N K.GLCM Based Texture Features for Palmprint Identification System[M]//Computational Intelligence in Data Mining-Volume 1. New Delhi:Springer India,2015:155-163.
[8]HOSSAIN K,PAREKH R.Extending GLCM to include Color Information for Texture Recognition[C]//International Conference on Modeling,Optimization and Computing.West Bengal:AIP Conference Proceedings,2010:583-588.
[9]白雪冰,王克奇,王辉.基于灰度共生矩阵的木材纹理分类方法的研究[J].哈尔滨工业大学学报,2005,37(12):1667-1670.
[10]冯建辉,杨玉静.基于灰度共生矩阵提取纹理特征图像的研究[J].北京测绘,2007(3):19-22.
[11]焦蓬蓬,郭依正,刘丽娟,等.灰度共生矩阵纹理特征提取的Matlab实现[J].计算机技术与发展,2012,22(11):169-171.
[12]高士忠.基于灰度共生矩阵的织物纹理分析[J].计算机工程与设计,2008,29(16):4385-4388.
[13]HARALICK R M,SHANMUGAM K,DINSTEIN I.Textural Features for Image Classification[J].Systems Man & Cybernetics IEEE Transactions on,1973(6):610-621.
Extraction of Border Line of Non-cut-lawn Based on GLCM
TONG Yizhou, LIU Yu
(FacultyofMechanicalEngineering&Automation,ZhejiangSci-TechUniversity,HangzhouZhejiang310018,China)
Abstract:The extraction of border line of non-cut-lawn will be helpful for the path planning of intelligent lawn mower. This algorithm calculates the gray level co-occurrence matrix(GLCM) through the gray scale image of the lawn. By comparing the four different eigenvalue matrixes “correlation” “contrast” “energy” and “homogeneity”, a binary image which has the best effect of texture segmentation can be extracted, and then be divided into a plurality of aequilate transverses. The size of contour traversal can also be determined by calculating the occupancy of black pixels in a single transverse and therefore the coordinate of the breakpoints can be found out. Consequently, these breakpoints from each transverse are connected with straight lines. This experiment shows that by using GLCM the texture characteristics as well as the border line of non-cut-lawn can be accurately extracted.
Key words:lawn segmentation; gray level co-occurrence matrix; eigenvalue matrixes; contour traversal
DOI:10.13954/j.cnki.hdu.2016.02.013
收稿日期:2015-08-07
作者简介:童逸舟(1990-),男,浙江余姚人,硕士研究生,图像处理.通信作者:刘瑜副教授,E-mail:liuyu@zstu.edu.cn.
中图分类号:TP391.4
文献标识码:A
文章编号:1001-9146(2016)02-0062-05