
基于支持向量机的纯电动汽车经济性换挡控制
2016-06-17 09:32晏伟清
合肥工业大学学报(自然科学版) 2016年4期
晏伟清,赵 韩
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
基于支持向量机的纯电动汽车经济性换挡控制
晏伟清,赵韩
(合肥工业大学 机械与汽车工程学院,安徽 合肥230009)
摘要:为了延长纯电动汽车续驶里程,文章应用基于支持向量机的方法对纯电动汽车实现经济性换挡控制,通过试验数据获得电机、逆变器和变速器的效率特性,建立纯电动汽车的能量消耗模型;在城市道路循环工况(UDDS)下应用车速和加速度双参数获得经济性最优挡位信息,形成学习数据库;应用支持向量机分类器和传统换挡规律在欧洲行驶工况(ECE)下进行在线预测和仿真对比。该文对纯电动汽车变速器智能换挡控制的研究,对于提高整车经济性具有一定的理论意义和实用价值。
关键词:电动汽车;经济性换挡控制;支持向量机;耗电量模型
机械式自动变速器(automated mechanical transmission,AMT)具有传动效率高、机构紧凑、成本低、继承性高等优点,是纯电动汽车的理想选择。由于永磁同步电机调速范围较宽,一般纯电动轿车采用2个挡位。
目前,自动变速器经济性换挡规律已有相关研究。文献[1-3]讨论了由于驾驶员的不当操作和城市道路工况的特殊性,会导致加速踏板开度的突变,易造成频繁换挡的现象;文献[4]的研究结果表明,对于不同的加速踏板控制策略所得的换挡规律也不同,因此换挡规律制定工作量较大。除了电机效率,影响整车经济性因素的还有逆变器以及变速器的效率,文献[5]仅仅考虑了电机效率,因此应用效果欠佳。
本文为获得经济性能更优的换挡控制方法,在城市道路循环工况(UDDS)下得到每个时间点能量消耗最低的挡位形成学习数据库,利用支持向量机分类器在欧洲行驶工况(ECE)下进行在线预测,并和传统方法进行仿真比较,最终验证了该智能换挡控制方法的优越性。
1电驱动系统特性
电驱动系统主要结构如图1所示,由于电池的效率一般较高,且对整个系统影响较低,因此本文忽略了电池效率的影响。
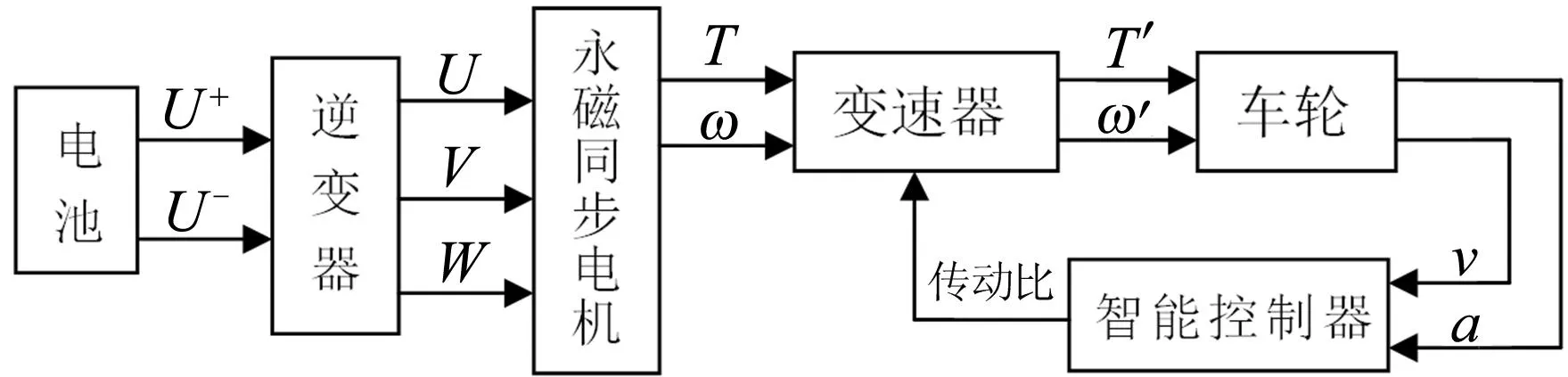
图1 电驱动系统框图
1.1电机效率特性
永磁同步电机由于效率高、体积小、质量轻成为纯电动汽车驱动电机的理想选择之一。本文采用上海电驱动公司生产的某永磁同步电机,该电机的参数见表1所列。

表1 驱动电机部分参数
加速踏板开度p与电机输出线性相关,具体的输出特性如图2a所示,由实验数据得出的电机效率特性如图2b所示。
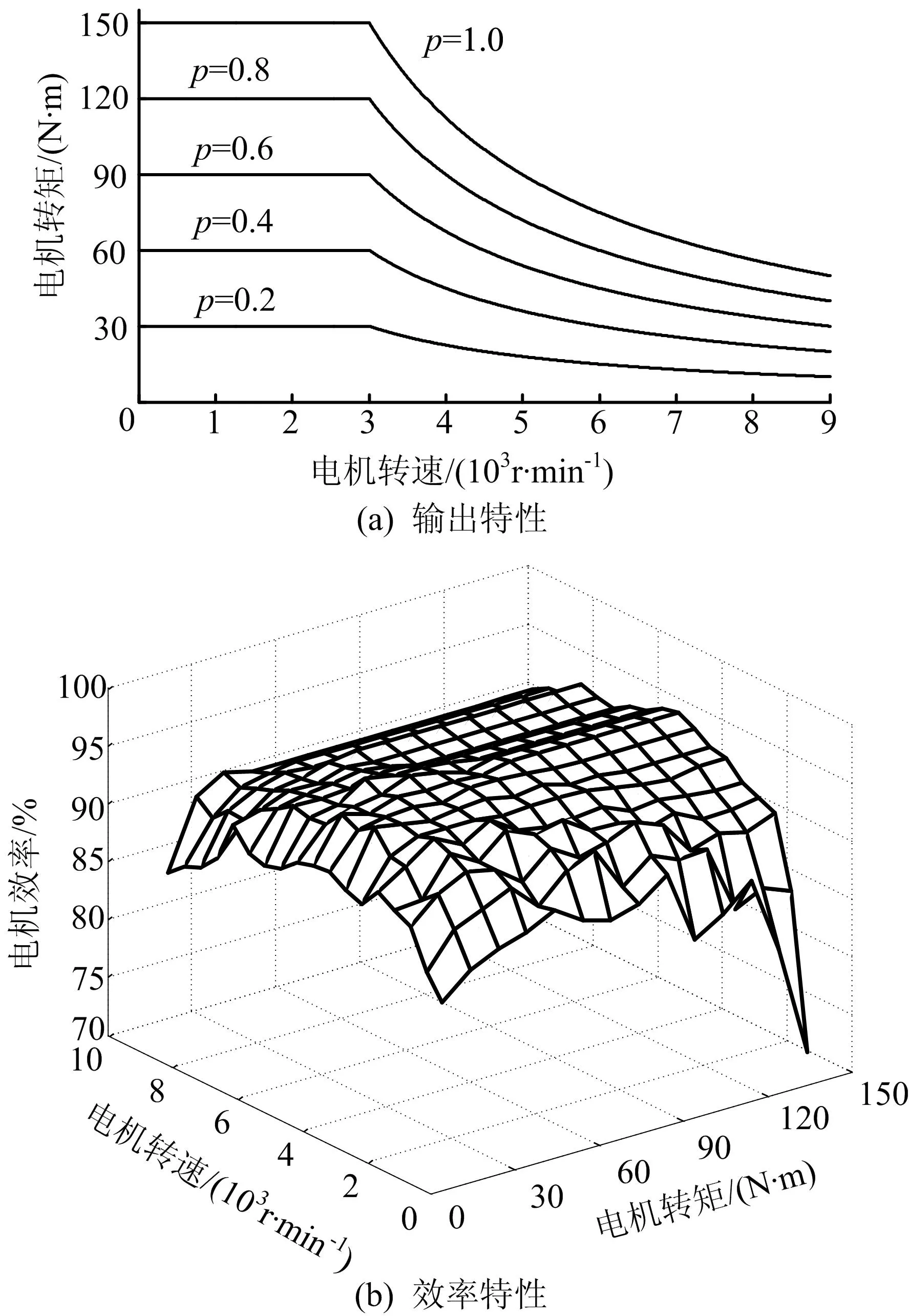
图2 电机输出和效率特性
1.2逆变器效率特性
在台架试验中,测得逆变器输入端和电机输入端的电压与电流值,从而得到逆变器的效率特性。加速踏板开度p=0.5和p=1.0时的逆变器效率曲线如图3所示。

图3 逆变器效率特性
当电机转速处于基速以下时,逆变器效率随着转速的升高而增加,且两者近似呈线性关系,其斜率的大小由加速踏板开度决定;当电机转速处于基速以上时,逆变器效率稳定在一个较高的值附近上下波动。根据实验数据归纳总结逆变器的效率ηb为:

(1)
其中,n为电机转速。
1.3变速器效率特性
本文选用2挡变速器,变速器相关参数及整车的部分参数见表2所列。

表2 整车部分参数
由实验测得变速器的效率普遍比电机和逆变器的高。具体一挡和二挡的效率如图4所示。

图4 变速器效率特性
2基于支持向量机的换挡控制
上文通过实验得到电驱动系统各主要部件的效率特性,下文将在此基础上建立电驱动系统的能量消耗模型,并通过支持向量机分类器实现纯电动汽车的智能换挡控制。
2.1电驱动系统能量消耗模型
假设电机转速为n,电机输出转矩为Ttq,轮胎滚动半径为r,传动比为iD,变速器传动效率为ηt,此时的车速为u,即
u=2πrn/60iD
(2)
由于纯电动汽车续驶里程有限,因此大多应用于城市道路工况,其坡度引起的阻力影响较小,为了方便计算将其忽略。
根据汽车理论有:
(3)
其中,δ为汽车旋转质量换算系数。一般对于轿车来说,δ可利用下面的经验公式进行估算,即
(4)
其中,iD为D(D=1,2)挡时整车的传动比;δ1′取值为0.04;δ2′为与动力装置有关的旋转部件的作用,取值0.002 5。可得:
(5)
若选取的工况为离散的时间区间,假设纯电动汽车的状态变量为x(k),其中x(k)定义为(T,ω),T为车辆需求转矩,ω为电机需求转速,则该离散点的电耗功率为:
(6)
其中,ηm为电机的效率;ηb为逆变器的效率。
在一个特定的行驶工况下系统的总电耗为:
(7)
2.2换挡控制系统
换挡控制的目标是实现快速小冲击或无冲击的换挡。在换挡控制过程中,变速器控制器与电机控制器可以通过CAN总线通讯进行协调控制。在摘挡后需要对电机进行调速,保证电机输入转速在一定范围内,以降低换挡冲击、延长变速箱的寿命。
具体的控制系统策略如图5所示。
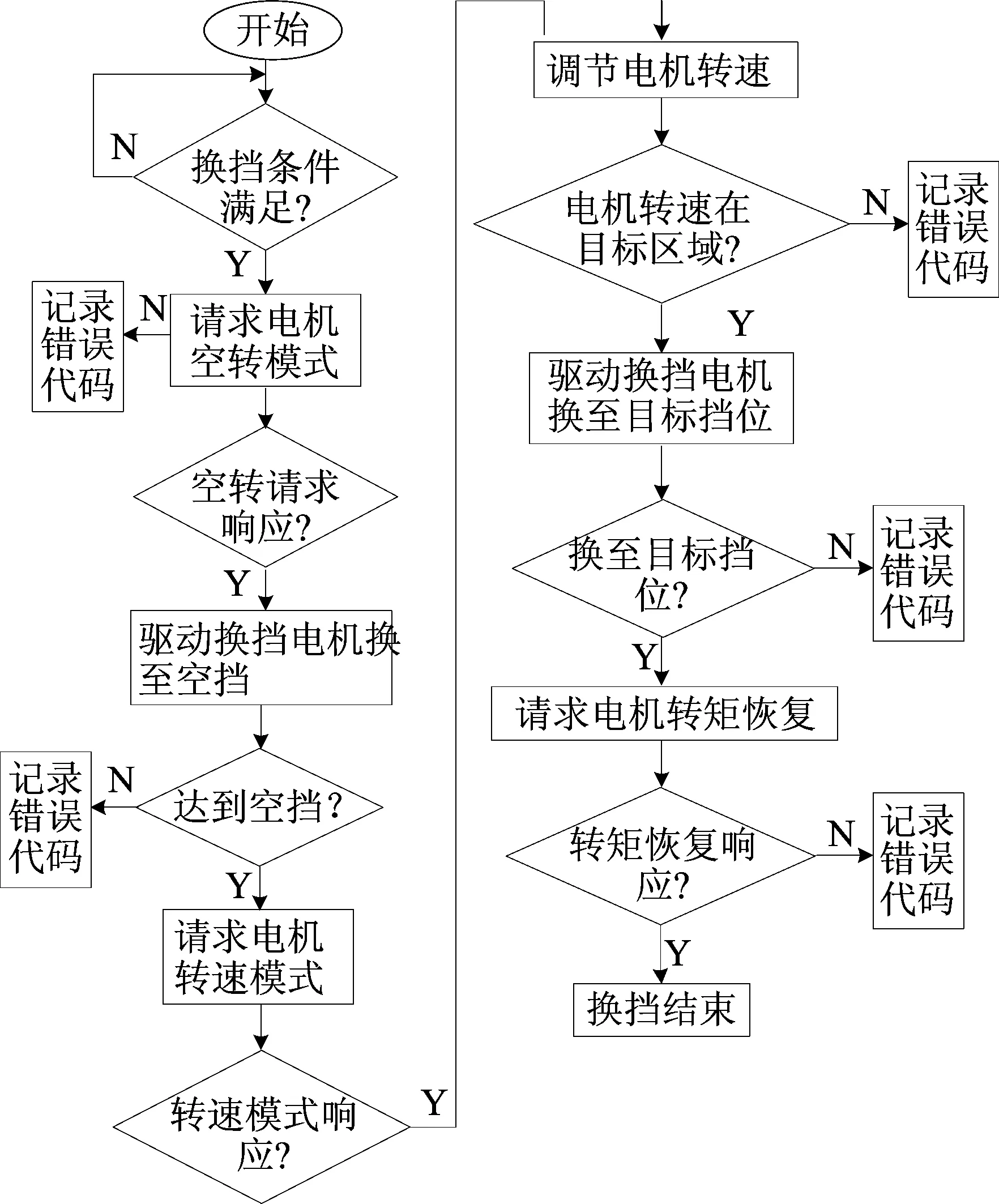
图5 换挡控制系统策略
2.3支持向量机在换挡控制的应用
支持向量机(support vector machine,SVM)是建立在统计学的VC维理论和结构风险最小原则基础上的一种机器学习方法。在解决有限样本、非线性、高维的模式分类和回归估计等问题上有独特的优势,且不存在局部最优问题,其对于二分类问题有非常好的预测效果,而本文中所论述的2挡位纯电动汽车经济性换挡控制正是一个二分类问题。
纯电动汽车变速器挡位的控制既要满足数学模型下的能量消耗最低,又要保证在城市道路工况下换挡不能过于频繁,其最优控制是一个复杂的非线性系统。利用支持向量机分类器通过核函数法对多维空间的超平面进行寻找[6-7],其良好的非线性映射能力在预测领域中显示出非常好的效果,具体智能换挡控制实现步骤如图6所示。
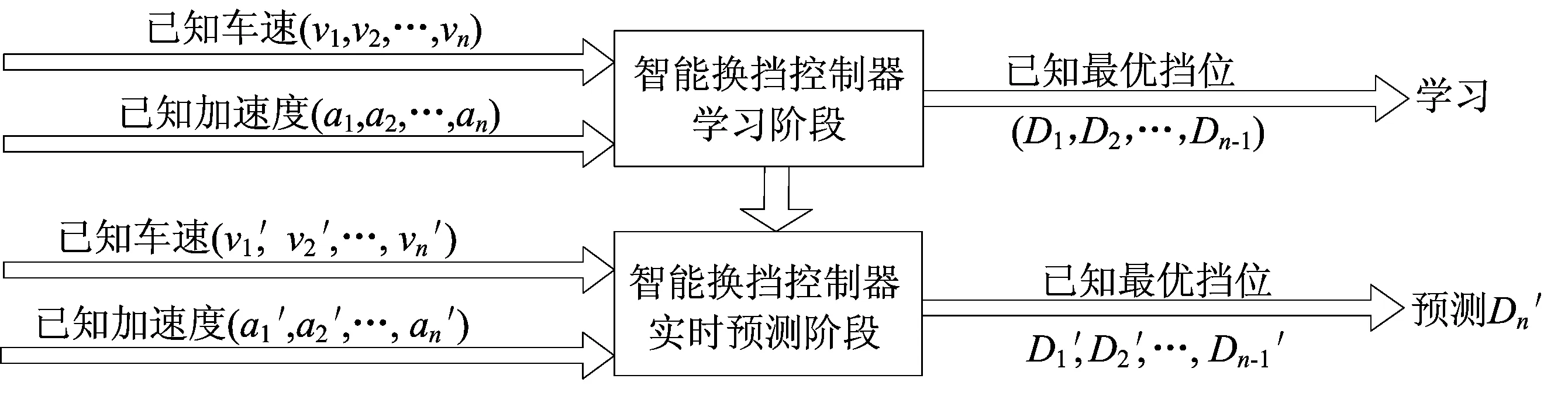
图6 智能换挡控制器实现步骤
2.4学习数据的获取
利用城市道路循环工况UDDS,依据2.1节中的整车能量消耗模型,计算出各离散的时间段整车在2个挡位的功率消耗,并根据结果制定出该工况下经济性最优的挡位信息。
在时间的离散格式中,纯电动汽车电驱动的模型可以表达为:

(8)

(9)
其中,ig1为一挡齿轮传动比;ig2为二挡齿轮传动比;i0为主减速器传动比。则系统的状态变量可表示为:
(10)
在UDDS工况下速度值是离散的,可以计算得到各时间点的车辆加速度。由(10)式可得到电驱动系统一挡下的状态变量[T1ω1]T和二挡下的状态变量[T2ω2]T。
经济性换挡的优化目标是在UDDS循环工况下求解优化的控制输入量u(t),使得总电耗尽可能最小。
在实际选取最优挡位的过程中将整个工况分为137组,每组的时间间隔为10 s。
将每个离散时间点的2组状态变量[T1ω1]T和[T2ω2]T分别代入(6)式中得到2个挡位下系统的功率消耗,再代入(7)式可得每组时间段内的总电耗,该组的最优挡位即为电耗最低的挡位。
第m(m=1,2,…,137)组时间段内最优挡位下的系统总消耗为:
(11)
在Matlab中进行计算,得到UDDS工况下的纯电动汽车的最优挡位信息,如图7所示。
由图7可以看出智能控制器获取了完整的学习数据库,即每个时间节点的车速、加速度和最优挡位。
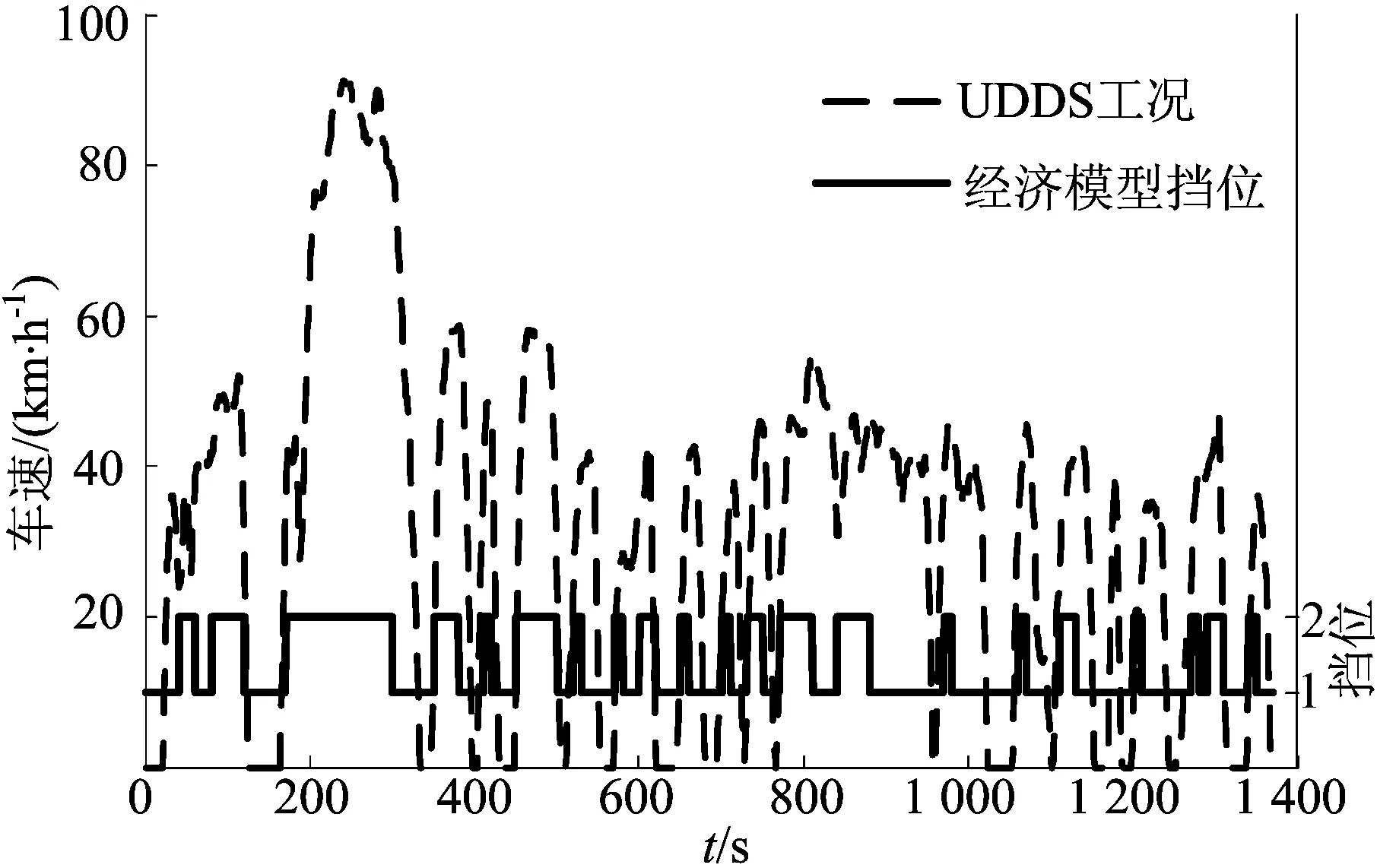
图7 UDDS经济性最优挡位
2.5支持向量机的挡位预测

(12)

图8 ECE预测挡位
由图8可知,两者差异并不大,从而证明了应用支持向量机分类器进行智能换挡控制的可行性。
3与传统换挡规律的对比验证
能量消耗是蓄电池输出端功率积分的过程。为驱动车辆,蓄电池输出功率应等于阻尼功率、传动装置中的功率损耗、电动机驱动功率以及在电子仪器设备中所含的功率损耗。
传统的经济性换挡规律以加速踏板开度和车速作为输入参数,以换挡曲线作为换挡的判断条件[8],如图9所示。
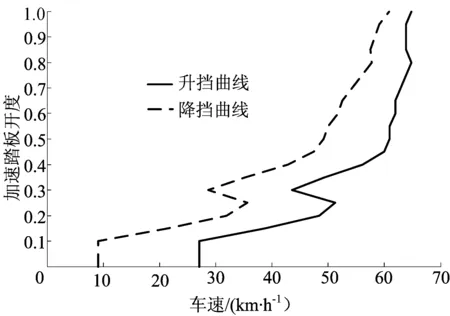
图9 传统经济性换挡规律
剩余电量(state of charge,SOC)能很好地体现出车辆的能耗情况,是纯电动汽车的重要指标之一。在Matlab/Simulink中搭建电驱动系统总耗电量模型[9-10]进行仿真,仿真过程输入为ECE工况,如图10所示。
本文所述换挡控制方法和传统换挡规律在ECE工况下仿真得到的车辆百公里电耗分别为17.93 kW·h和20.22 kW·h,其对应的SOC曲线如图11所示。
由图11可知,基于支持向量机分类器的换挡控制方法明显优于传统换挡规律。
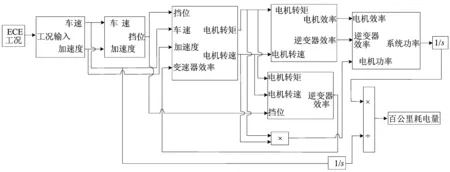
图10 整车耗电量模型
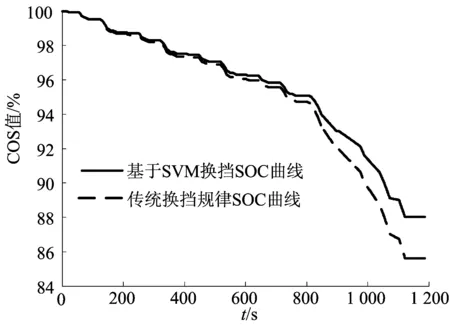
图11 换挡规律SOC值对比
4结论
(1)本文获得了纯电动汽车中永磁同步电机、逆变器、传动系统的效率模型,并建立了整车功率消耗数学模型,方便得出车辆的实时能量消耗情况。
(2)在城市道路循环工况UDDS下,根据整车功率消耗数学模型比较2挡位的能量消耗,获得了最优挡位学习数据库。
(3)应用支持向量机分类器的相关理论,通过学习到应用的方式,实现了纯电动汽车智能经济性换挡控制。
(4)将基于支持向量机分类器的智能换挡控制方法和传统经济性换挡规律在欧洲行驶工况ECE下进行仿真比较,得出本文的换挡控制具有更优的能量消耗率,证明了此经济性换挡控制方法具有理论的可行性与优越性。
[参考文献]
[1]秦大同,周孟喜,胡明辉,等.电动汽车的加速转矩补偿控制策略[J].公路交通科技,2012,29(5):146-151.
[2]刘拂晓,赵韩,江昊.纯电动汽车AMT换挡规律及仿真研究[J].合肥工业大学学报:自然科学版,2013,36(11):1281-1284.
[3]陈淑江,秦大同,胡明辉,等.兼顾动力性与经济性的纯电动汽车AMT综合换挡策略[J].中国机械工程,2013,24(19):2687-2692.
[4]何忠波,白鸿柏,杨建春.AMT车辆频繁换挡的消除策略[J].农业机械学报,2006,37(7):9-13.
[5]秦大同,周保华,胡明辉,等.两挡电动汽车动力传动系统的参数设计[J].重庆大学学报:自然科学版,2011,34(1):1-6.
[6]李雪,贺昱曜,闫茂德.基于核方法的移动机器人远程控制时延预测与分析[J].计算机应用研究,2008,25(7):2129-2131.
[7]梁燕.SVM分类器的扩展及其应用研究[D].长沙:湖南大学,2008.
[8]唐永琪.纯电动汽车两档自动变速器换档品质研究[J].上海汽车,2013(1):3-7.
[9]Lin C C,Peng H,Grizzle J W,et al.Power management strategy for a parallel hybrid electric truck[J].IEEE Transactions on Control System Technology,2003,11(6):839-849.
[10]Lin C C,Peng H,Jeon S,et al.Control of a hybrid electric truck based on driving pattern recognition[C]//Proceedings of the 2002 Advanced Vehicle Control Conference.Hiroshima,2001:1-6.
(责任编辑胡亚敏)
Economic shift strategy for pure electric vehicle based on SVM
YAN Wei-qing,ZHAO Han
(School of Machinery and Automobile Engineering,Hefei University of Technology,Hefei 230009,China)
Abstract:Aiming to increase driving range,an economic shift strategy for pure electric vehicle is proposed by using the method of support vector machine(SVM).Firstly,the efficiency characteristics of motor,inverter and transmission are obtained through the experimental data and the power consumption model of pure electric vehicle is established.Secondly,the most economic gear ratios as learning database under UDDS driving cycle are gotten by using the velocity and acceleration as two input parameters.Finally,the application of SVM classifier works out the results and the simulation verifies that the shift strategy is more excellent than traditional one under ECE driving cycle.The research on intellectual shift strategy is of theoretical and practical significance in enhancing the economic characteristics of vehicles.
Key words:electric vehicle;economic shift strategy;support vector machine(SVM);model of electricity consumption
收稿日期:2015-01-23;修回日期:2015-08-27
基金项目:国家国际科技合作专项资助项目(2014DFA80440)
作者简介:晏伟清(1991-),男,江苏扬州人,合肥工业大学硕士生;
doi:10.3969/j.issn.1003-5060.2016.04.004
中图分类号:U463.212.31
文献标识码:A
文章编号:1003-5060(2016)04-0451-06
赵韩(1957-),男,安徽滁州人,博士,合肥工业大学教授,博士生导师.
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
电子制作(2017年20期)2017-04-26
中国水运(2016年11期)2017-01-04
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
海外星云(2016年17期)2016-12-01
价值工程(2016年29期)2016-11-14
科学与财富(2016年28期)2016-10-14
