停车设备的分布式控制系统
2016-06-14 03:56梁崇彦佛山市恒进智能停车技术有限公司
科学中国人 2016年14期
梁崇彦佛山市恒进智能停车技术有限公司
停车设备的分布式控制系统
梁崇彦
佛山市恒进智能停车技术有限公司
摘要:现有的停车设备采用整体式控制系统,存在规模大、连接线缆多、控制复杂、成本高、须专门设计、难以标准化生产、安装施工难度大、维修不方便等缺点,而上述缺点在升降横移停车设备表现得尤为突出。本文提出的解决方案是:采用一个主控装置和若干个终端装置组成分布式控制系统,主控装置的PLC芯片或者单片机只需少量输入/输出端口,一种规格的主控装置可满足不同层数和不同载车板个数所需;终端装置按同时满足一个载车板的升降控制和横移控制进行标准化设计,停车设备需要增加或者减少载车板,只需同时增加或者减少终端装置而无需改动主控装置,做到模块化、标准化设计,零部件互换性强;而形式上的串联总线布局又使得布线数量大幅减少,布线距离也大大缩短,为安装施工、调试检修带来莫大的便利。作者基于上述方案已申报国家发明专利。
关键词:停车设备;升降横移;控制系统;整体式;分布式;PLC;单片机
绪论
目前停车设备采用整体式控制系统。其中,应用最广泛的升降横移停车设备采用以PLC装置为主控芯片的整体式控制系统,每一个载车板的升降电机驱动、横移电机驱动以及防坠器驱动都由PLC装置分别输出信号控制;每一个载车板涉及的I/O信号点均分别接到PLC装置的输入端口,再加上公共用途以及设备其他设施的信号接入,需要占用PLC装置的I/O端口多、控制模块规模大、连接线缆多、控制复杂,而且,由于具体项目存在载车板数量及层数的差异,使得整体式控制系统不得不专门设计,更进一步增加成本。
本文所述方案是把升降横移停车设备原来的整体式控制系统拆分为由一个主控装置和若干个终端装置,一个终端装置对应一个载车板,即每一个载车板均视为被一个终端装置控制的单元。终端装置的第一个任务是当主控装置选中对应载车板时往上报送载车板的信息、使得主控装置获得载车板当前状态;第二个任务是当主控装置选中对应载车板时接收主控装置的驱动信号、使得载车板动作。上述功能的实现是主控装置与各终端装置之间形式上为总线串联方式连接,所有载车板的信号线都通过终端装置接入到信号总线,该信号总线最终接入主控装置;主控装置除了接入信号总线之外,只需再接入公共的信号源。这样,整个控制系统将非常简洁、信号线的数量将大幅减少,且易于实现模块化、标准化设计,零部件的互换性极强。本文所述方案的思路同样适用于其他类型的停车设备。
一、停车设备和升降横移停车设备
停车设备的全称是机械式停车设备,是一种多平面的空间立体车库,它以单层平面停车库为核心,通过机电系统来实现车位的空间位置变动,使车位实现由空间到平面的转化,从而实现多层平面停车的功能,具有占地少、停车多、投资少、停车方式先进等优点。立体车库主要由控制系统、强电系统、机械传动系统和检测及安全系统组成。按照我国相关标准,分为升降横移类、平面移动类、垂直升降类、简易升降类等类型。在国内,又以升降横移类、平面移动类和垂直升降类的应用最为普遍。升降横移类停车设备对场地的适应性较强,对土建要求较低,可在露天、地下室建造,也可设计成半地下式,规模可大可小,层数可多可少,根据不同的地形和空间进行任意组合、排列,空间利用率高,使用、维护简便,价格较低。市场占有率在80%左右。
目前,升降横移停车设备采用以PLC装置为主控芯片的整体式控制系统,每一个载车板的升降电机驱动、横移电机驱动以及防坠器驱动,都由PLC装置分别输出信号控制;每一个载车板升降动作的到位或超限、防坠器的到位或故障、横移动作的到位或超限,相关信号点均分别接到PLC装置的输入端口,加上急停开关、人车误入检测和人机界面装置等信号的接入,需要占用PLC装置较多的输入、输出端口,使得整体式控制系统的控制模块规模大、连接线缆多、控制复杂、成本高,且须根据具体情况专门设计,难以标准化生产,安装施工难度大、维修不方便。
二、升降横移停车设备控制系统的改进分析
升降横移停车设备控制系统貌似复杂,但换一种角度、从控制对象来看,可以分为直接与载车板相关的个体控制以及与全部载车板相关的综合控制两大部分。
直接与载车板相关的个体控制存在较多的共通性。一个完整载车板的位置调度功能为分别作横向移动和垂直移动,通过驱动信号的输出进行横移驱动、升降驱动以及与之配合的防坠器驱动来实现。一个完整载车板的状态信息需要通过与之对应的检测信号来描述,这些信号包括左移到位、左移超限、右移到位、右移超限、下降到位、下降超限、上升到位、上升超限以及与之配合的防坠器打开到位。按传统做法,上述所有信号都要分别接入控制系统。控制系统用于直接控制载车板所需的I/O管脚接入点是单个载车板需要数量乘以载车板数量,而载车板分别布置在设备不同位置的各空间区域。因此,控制系统所需信号线数量较多、且布线复杂。
与全部载车板相关的综合控制,所需的I/O管脚接入点则相对较少,通常包括主电源控制、电源相位转换控制等在内的强电控制,以及急停开关、人车误入检测、警示装置、人机界面装置的信号接入及向控制。控制系统的主要控制功能是对人机界面装置接收到的载车板调度指令进行分析,通过收集相关载车板当前状态信息、得出相关载车板的运行规划,然后逐一实施驱动控制。在运行过程中,需要动态收集相关载车板的当前运行信息并及时作出处置,还要及时监测设备其他设施特别是安全设施、综合状态检测装置的信号,并及时作出处置。
很明显,上述分析其中“直接与载车板相关的个体控制存在较多的共通性”的结论可以作为控制系统改进的切入点。具体做法是:设计出一种升降横移停车设备的分布式控制系统,把传统的整体式控制系统按功能和安装位置巧妙地拆分为主控装置和终端装置两大部份;主控装置的主控芯片采用简单型式的PLC芯片或者单片机芯片,主控装置负责与全部载车板相关的综合控制,所有与综合控制有关的I/O信号全部接入主控装置的I/O接口管脚。另外,把主控装置通过指令强电控制单元输出的驱动载车板电机运行的电机电源、相关电气元器件工作所需的控制电源以及直接从主控装置输出的控制载车板的指令均作为公共资源同时向所有终端装置输出;使用二进制编码按照具体需要每次选中指定的终端装置和对应的载车板,仅接受由选中终端装置处理过的本级载车板状态信号。因此,主控装置所需I/O端口的数量大幅减少,且其规模大小与设备层数及载车板个数无关,可以标准化设计。终端装置则按同时满足一个载车板的升降控制和横移控制进行标准化设计,多个终端装置之间采用逐级联结方式连接,停车设备需要增加或者减少载车板,只需同时增加或者减少终端装置而无需改动主控装置,即一种规格的主控装置可满足不同层数和不同载车板个数所需,做到模块化、标准化设计和制作。由于载车板之间的空间距离较短,因此,可以采用经各级终端装置光电耦合输入和信号放大输出的并行总线数据传输的方式,满足高速、同步的目的。
三、分布式控制系统构成示意图
下面是升降横移停车设备分布式控制系统的构成示意图。
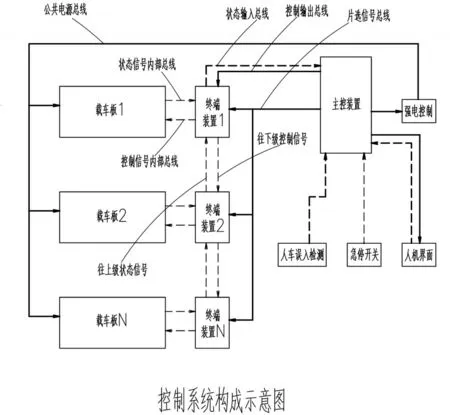
从图中可以看出,升降横移停车设备控制系统分为一个主控装置和若干个终端装置组成,图示右上角设置有主控装置,图示左侧为若干个终端装置,可以看出,图示载车板1对应终端装置1、两者之间通过状态信号内部总线和控制信号内部总线连接;类似的内部连接也在载车板2和端装置2、载车板N和终端装置N之间实现;所有终端装置之间通过往上级状态信号总线和往下级控制信号总线逐级连接,最接近主控装置的一级(即图示的终端装置1)与主控装置连接。
主控装置的I/O端口的连接方式是:连接强电控制单元,通过对强电控制单元的控制,使得强电控制单元通过公共电源总线统一向各终端装置输出;与人车误入检测、急停开关、人机界面等与全部载车板相关的综合控制设施连接,实现综合控制;通过片选信号总线向每一个终端装置输出相同的片选信号;通过控制信号输出总线向终端装置1输出控制信号,并通过终端装置之间的往下级控制信号总线逐级传递、最后接至末级的终端装置;各终端装置的状态信号通过终端装置之间的往上级状态信号总线逐级传递,最终由终端装置1通过状态信号输入总线接入主控装置。
每一个终端装置具备的基本功能是:第一,设置有通过片选使能的两路输入选择器,两路输入选择器的其中一路与对应载车板的所有状态检测装置的信号输出端连接,直接接收这些状态检测装置的信号输入,另一路与下一级终端装置的状态信号总线连接;当控制装置的片选信号选中该终端装置,则该两路输入选择器选择本终端装置对应的载车板的所有状态检测装置的信号对外输出;当控制装置的片选信号未能选中该终端装置,则该两路输入选择器选择下一级终端装置的状态信号总线的信号对外输出。第二,设置有通过片选使能的两路输出选择器,两路输出选择器的其中一路与对应载车板运行单元的所有驱动信号输入端连接,直接向这些运行单元输出驱动信号;另一路与上一级终端装置(第一个终端装置的上一级终端装置是主控装置!)的控制信号总线连接;当控制装置的片选信号选中该终端装置,则该两路输出选择器选择从上一级终端装置(第一个终端装置的上一级终端装置是主控装置!)的控制信号总线接收到的控制信号直接向连接本终端装置的对应载车板的运行单元输出;当控制装置的片选信号未能选中该终端装置,则该两路输出选择器向下一级终端装置的控制信号总线原样输出的信号输出从上一级终端装置(第一个终端装置的上一级终端装置是主控装置!)的控制信号总线接收到的控制信号。上述结果使得主控装置通过片选即可获得指定载车板的状态检测信号,通过片选即可向指定载车板发出驱动控制信号。
四、分布式控制系统应用举例
假设主控装置需要读取载车板N的状态信息,则首先通过片选信号输出触发载车板N对应的终端装置N设置的两路输入选择器,使得该两路输入选择器的输入端接收与载车板N连接的所有状态检测装置的信号输出端的状态信号,然后向上一级终端装置(即终端装置2)的状态信号总线输出。而主控装置通过片选信号总线发出的片选信号由于不能触发终端装置2设置的两路输入选择器,故使得该两路输入选择器的接收与载车板2连接的状态输入端信号被屏蔽,而选择从下一级终端装置(即终端装置2)的状态信号总线接收到的输出信号,然后向上一级终端装置(即终端装置1)的状态信号总线输出。同理,主控装置通过片选信号总线发出的片选信号由于不能触发终端装置1设置的两路输入选择器,故使得该两路输入选择器的接收与载车板1连接的状态输入端信号被屏蔽,而选择从下一级终端装置(即终端装置1)的状态信号总线接收到的输出信号,然后向上一级终端装置(即主控装置)的状态信号总线输出。至此,主控装置即从状态信号总线获得载车板N的状态信息。
假设主控装置需要驱动载车板2,则首先通过片选信号输出触发载车板2对应的终端装置2设置的两路输出选择器,使得该两路输出选择器的输出端向与载车板2连接的运行单元的输出驱动信号。而主控装置通过片选信号总线发出的片选信号由于不能触发终端装置1设置的两路输出选择器,故使得该两路输出选择器的输出端将从上一级终端装置(即主控装置)的控制信号总线接收到的控制信号输出直接向下一级终端装置(即终端装置2)的控制信号总线发送;因此,终端装置2设置的两路输出选择器向载车板2的运行单元输出的驱动信号就是主控装置发出的运行控制信号。由于主控装置通过片选信号总线发出的片选信号不能触发终端装置N设置的两路输出选择器,故该两路输出选择器接收到从上一级终端装置(即终端装置2)的控制信号总线发来的控制信号不起作用。
当然,一个完善的控制系统还要适当增加信息反馈机制,使得片选信号选中的终端装置能够向主控装置发出就绪信号,以便主控装置据此判别片选是否成功,并且进行下一步的操作。
上述技术方案的终端装置全部采用普通的逻辑电路芯片。另一个技术方案是采用单片机作为终端装置的控制芯片,终端装置之间的信息交互或改为抗干扰能力更强的串行通讯,每个终端装置所控制的载车板则适当增加。而且,相关技术方案除了可以应用在升降横移停车设备之外,同样适用其他类型的停车设备。
参考文献:
[1]《机械式停车设备类别、型式与基本参数》JB/T8731-1998
[2]《升降横移类机械式停车设备》JB/T8910-1999
猜你喜欢
煤气与热力(2021年9期)2021-11-06
军民两用技术与产品(2021年5期)2021-07-28
软件(2020年3期)2020-04-20
电子制作(2019年22期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
电子世界(2004年4期)2004-07-26