追尾碰撞的车辆稳定性分析与控制
2016-06-13 07:27金智林
重庆理工大学学报(自然科学) 2016年5期
赵 锋,金智林,冯 博,张 雷
(1.南京航空航天大学, 南京 210016; 2.中国汽车技术研究中心,天津 300300)
追尾碰撞的车辆稳定性分析与控制
赵锋1,金智林1,冯博2,张雷1
(1.南京航空航天大学, 南京210016; 2.中国汽车技术研究中心,天津300300)
摘要:汽车追尾产生二次碰撞是一种较严重的交通事故。为了解决此问题,进行了汽车追尾碰撞动力学分析及稳定性控制研究。在Simulink软件中分别建立了追尾车辆及被追尾车辆的动力学模型,应用碰撞动力学理论分析了汽车碰撞后被追尾车辆关键参数的变化过程及其稳定性规律。针对追尾碰撞后被追尾车辆的失稳情况,提出了一种基于逻辑门限值与PID调节各车轮制动力的PISP追尾碰撞稳定性控制策略。Carsim与Simulink联合实例仿真结果表明:该策略能保证被追尾车辆的稳定性,可减轻及避免车辆追尾后发生二次碰撞造成的损失。
关键词:追尾碰撞;车与车碰撞;稳定性控制
汽车碰撞在汽车事故中最为常见,同时也是一种比较复杂的碰撞现象。车与车碰撞属于塑性碰撞、弹性碰撞和弹塑性碰撞中的哪一种需要具体分析。汽车被追尾后往往会偏离道路行驶,引起二次甚至连环碰撞。因此,在汽车发生碰撞后,控制车辆保持原有轨迹行驶能避免碰到路边障碍或与来往车辆发生二次撞击。
研究被撞汽车稳定性时,首先要研究碰撞模型,通过数学建模来仿真碰撞过程。车辆碰撞研究一般分碰撞作用阶段和碰撞作用后车辆运动阶段[1],国内在此方面研究不多。国外学者Brach[2]建立了碰撞力学模型。密歇根大学HueiPeng领导的小组在此基础上进行了深入研究,其中Zhou Jing[3]进行了碰撞建模及积分,解决了碰撞过程的数学求解问题。Kim等[4-5]在此基础上进行了ESP结合主动转向控制方法的研究。Yang等[6-7]通过制动策略分析了碰撞后最优路径控制方法。
本文旨在探索车辆被追尾碰撞后的制动控制策略,防止车辆偏离轨道,避免发生二次碰撞事故。PISP(post-impact stability program)控制方案能通过控制车辆横摆角及横摆角速度实现车辆稳定控制。
1汽车追尾碰撞过程分析
碰撞数学模型是研究碰撞的基础。Brach[2]建立了著名的基于动量守恒的二维碰撞模型,并被广泛应用于事故再现。本研究以此模型为基础,建立了如图1所示的汽车碰撞模型,并以积分的形式得到碰撞后的数学解。首先定义了车辆发生碰撞时的坐标系,并将恢复系数和摩擦因数作为两车接触时的参量。
图1中分为撞击车辆和被撞车辆。xoy坐标假定为基准坐标,其中x轴为水平方向,y轴为垂直方向。车辆初始时刻与x轴的夹角定义为θ。另外一个n-t坐标和碰撞力有关,t轴平行于两辆碰撞车辆的虚拟碰撞面,而n轴垂直于该平面。n-t坐标系和xoy坐标系之间的夹角用Г表示。假设脉冲矢量作用在车上的一个特定点,根据Brach的原理,假设这个点的位置是已知的,可以由到重心(CG)的距离(d)和与中轴的夹角(ζ)计算得到。

图1 车与车追尾碰撞简化模型
因为车辆被限制在xy平面内,所以可用6个未知的变量来确定碰撞后的运动。
由图1可得:
(1)
(2)
恢复系数是衡量车辆碰撞过程中能量损失大小的物理量,它的定义是:在碰撞点两车碰撞后速度差值与碰撞前速度差值的比值。
(3)
恢复系数的大小取决于材料属性、表面几何形状、冲击速度等,确定其值需要大量的经验数据[8-9]。此外,车与车之间的速度差异也对恢复系数的大小有显著影响。恢复系数的取值范围为0~1。
1) e=1,为完全弹性碰撞。碰撞过程中动能不会有损失,且没有车体变形。
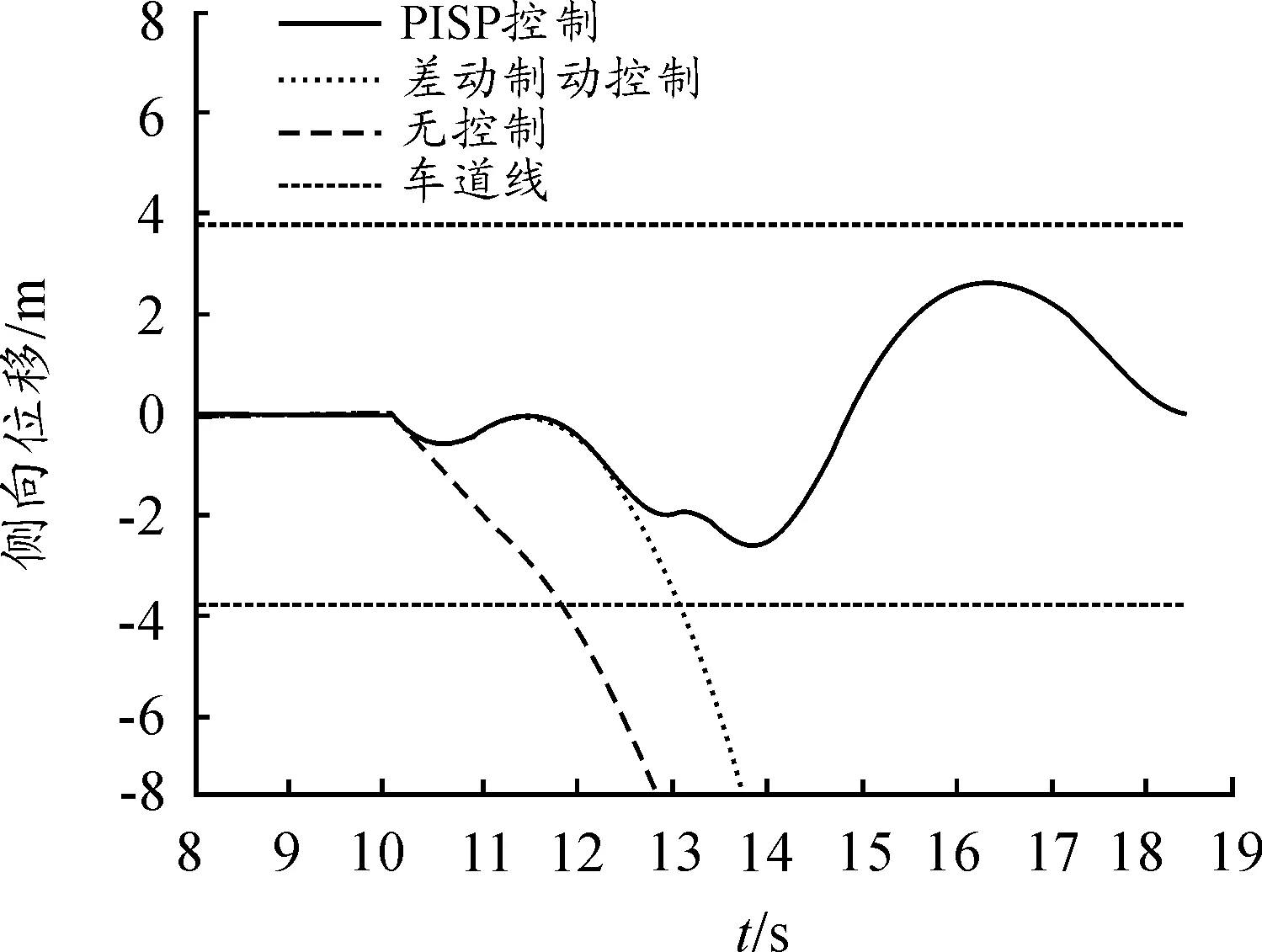
2) 0 3) e=0,为塑性碰撞。此碰撞发生后,动能全部被车体变形吸收,车与车之间不会发生能量交换。 参考国外学者的研究[10-11],本文采用三角波作为碰撞力激励的波形。图2所为车辆碰撞过程曲线。 图2 车辆碰撞过程曲线 2碰撞动力学建模与仿真分析 根据二维碰撞模型无法通过两车碰撞前的状态得到碰撞力的大小,因此需要建立4自由度车辆碰撞模型,通过解出碰撞冲量的大小即可得到碰撞力曲线,从而进行车与车碰撞仿真。 2.14自由度车辆碰撞建模 根据汽车系统动力学理论[12],通过对汽车纵向、侧向、横摆及侧倾4个自由度分析建模(模型见图3)可得到如下方程: 纵向运动 (4) 侧向运动 (5) 横摆运动 (6) 侧倾运动 (7) 其中: (8) 图3 车与车追尾碰撞4自由度模型 采用同样方法可以建立撞击车辆碰撞模型。为了得到碰撞力曲线,首先需要得到碰撞冲量大小,因此将碰撞模型式(4)~(7)两边进行积分,得到: (9) (10) I1 z(Ω1z-ω1z) + I1 xz(Ω1x-ω1x) = (11) I1 z(Ω1x-ω1x) + I1 xz(Ω1z-ω1z)- (12) 结合碰撞二维物理模型以及撞击车辆模型,将12个非线性方程用Matlab解出就可以得到碰撞冲量的大小以及碰撞后车辆横摆角速度、车速等12个参数。这些参数将用来评估碰撞程度及确定PISP控制策略的相关参数。 2.2碰撞仿真分析 图4为碰撞仿真系统。碰撞解析模块通过建立4自由度车辆碰撞模型可以根据前、后车辆碰撞前的初始状态判断两车发生碰撞后碰撞冲量的大小,从而分析并控制不同状态下的被撞车辆。 在车辆被追尾后,通过设计PISP控制系统调节制动力来控制车辆的横摆。通过横摆角速度和纵向加速度的梯度变化率来判断车辆是否被碰或是否启动PISP程序。利用Carsim和Simulink联合仿真[13],根据两车初始状态计算可以得到碰撞力,并施加到Carsim整车模型中。利用转向角、横摆角速度以及车速等反馈信息进行PISP控制系统设计。车辆参数取值见表1。 图4 碰撞仿真系统 表1 车辆参数 在模拟过程中,碰撞车辆和被碰撞车辆完全相同。当两车辆发生追尾碰撞时,两车对应的纵向速度分别为:v1x=30 m/s,v2x=40 m/s,两车的横向速度、横摆角速度和侧倾角速度都为0。设定恢复系数为0.2。此外,路面附着系数μr=0.7,ζ=0,碰撞发生时间为0.15 s。 图5为在未施加任何控制下驾驶员控制被撞车辆沿直道行驶时各状态曲线。从图5可以看出:在车辆被追尾后,各个状态都瞬间发生变化,而且变化幅值也都很大,其中横摆角达到170°,车辆发生调头。从侧向位移随时间变化的曲线可以看出:车辆已经偏离轨道行驶,这在现实中可能导致多次碰撞事故的发生。 图5 车辆被撞后状态变化曲线 3追尾稳定性控制策略 汽车被碰撞后主要需考虑两方面内容:一是车辆稳定性控制;二是轨迹保持问题。此外,还需要考虑两者耦合时的控制问题。横摆角速度可以控制车辆稳定性,横摆角可以控制车辆轨迹,因此将两者集成进行控制可以保证车辆被碰撞后的稳定性以及保持车辆按原有轨迹行驶。 以2自由度线性车辆模型作为横摆角速度期望值的设计模型。控制器的逻辑门限控制框图如图6所示。根据实际情况,本研究采用逻辑门限值集成控制横摆角和横摆角速度[14-15]。根据横摆角的变化,首先利用PID控制汽车轨迹,当横摆角控制在一定范围后,通过门限值切换控制状态,再控制横摆稳定性。整车模型仍然采用Carsim模型。 图6 PISP逻辑门限控制框图 图7为根据门限值切换控制的逻辑框图。横摆角门限值的确定需要根据仿真实验反复调节。门限值的大小会影响横摆角的调节时间,进而影响车辆侧向位移大小。在直线工况下,对车与车碰撞进行仿真并分别对被撞车辆进行无控制、差动制动控制以及PISP控制测试。通过调试,在PISP系统中设定横摆角门限值为30°,即当横摆角小于30°时开始横摆角速度调节。 图7 碰撞后控制逻辑框图 图8为横摆角测试结果。由图8可见:在12 s以后,PISP控制车辆稳定在0°附近;差动制动控制所用时间比PISP控制多出6 s;无控制时效果最差。说明通过PISP控制,车辆在被撞后能迅速回到碰撞前的行驶角度,可以避免偏向行驶。 图9为横摆角速度仿真测试结果。由图9可见:差动制动控制能迅速控制好横摆角速度。但是此时,车辆驾驶方向已经严重偏离轨道(见图10);PISP能在控制好车辆行驶方向后再控制横摆角速度,因此车辆在被追尾后,即使驾驶员未及时施加控制,PISP也能控制车辆行驶轨迹,避免车辆撞向护栏或被来往车辆撞击。 图8 横摆角随时间变化曲线 图9 横摆角速度随时间变化曲线 图10为车辆侧向位移曲线。车道宽为3.75 m,双向行驶。由图10可见:在无控制情况下,车辆在碰撞2 s后撞到护栏;在差动制动控制情况下,车辆在碰撞3.2 s后撞到护栏;PISP则能控制住车辆侧向位移在一个相对安全的区域内或给驾驶员留出充分的时间采取措施。 图10 车辆侧向位移 制动力分配曲线如图11所示。在发生碰撞后,车辆横摆角变化为负值。通过控制2个左边车轮制动力可最大限度地利用轮胎力,从而控制车辆的横摆角。 图11 制动力分配曲线 4结束语 本文通过仿真车辆碰撞过程对被撞车辆进行控制,取得了良好效果。 通过建立的车与车追尾碰撞模型可以分析被撞车辆的状态。该模型作为追尾碰撞的研究基础,为控制策略的实现提供依据。设计的PISP控制系统在一定程度上避免了车辆在碰撞后严重偏离轨道的情况的发生,可做为辅助系统为驾驶员提供帮助。 本文进行了车辆追尾碰撞的基础研究。由于碰撞过程十分复杂,因此本文所建碰撞模型仅适用于车辆轻微追尾碰撞,且仅考虑车辆直线行驶工况,未建立车辆转向状态下发生碰撞时的动力学模型。更精确的车与车碰撞理论分析仍需要进一步研究。 参考文献: [1]魏朗,陈荫三.车辆碰撞过程的试验分析研究[J].汽车公程,2000,22(4):256-261. [2]BRACH R M.Vehicle Accident Analysis and Reconstruction Methods[J].SAE Warrendale PA,2005,128:259-268. [3]ZHOU J.Collision model for vehicle motion prediction after light impacts[J].Vheicle System Dynamics,2008,46:3-15. [4]KIM B J,PENG H.Collision strength estimation and preemptive steering control for Post-impact vehicle motion control[C]//Proc of AVEC.USA:[s.n.],2014:496-503. [5]KIM B J,PENG H.Optimal vehicle motion control to mitigate secondary crashes afte r an initial impact[C]//Proceedings of the ASME 2014 Dynamic Systems and Control Conference.USA:[s.n.],2014:1-8. [6]YANG D.Post-impact vehicle path control by optimization of individual wheel braking sequences[C]//Proc.of AVEC.USA:[s.n.],2010:882-887. [7]YANG D,GORDON T,JACOBSON B.A nonlinear post-impact path controller based on optimized brake sequences[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,2012,50:131-149. [8]Antonetti V W.Estimating the Coefficient of Restitution of Vehicle-to-Vehicle Bumper Impacts[J].SAE Warrendale,1998(10):980552. [9]姚文莉,陈滨,刘才山.基于能量恢复系数的多刚体系统的摩擦碰撞[J].北京大学学报(自然科学版),2007 (5):585-591. [10]GEOFFREY J G,GEE R S.Introduction of Pulse Shapes and Durations into Impulse-Momentum Collision Models[J].SAE,2005(1):1183. [11]MICHAEL S.Varat and Stein E.Husher.Vehicle Impact Response Analysis Through the Use of Accelerometer Data[J].SAE Warrendale,2010(1):0850. [12]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005. [13]Mechanical simulation corporation[EB/OL].[2011-05-24].http:www.carsim.com. [14]黄智,吴乙万.高速车辆车道偏离辅助控制研究[J].机械工程学报,2013,49(2):157-163. [15]MASAO N,SACHIKO Y,YUTAKA H.Integrated Control of Active Rear Wheel Steering and Direct Yaw Moment Control Using Braking Force [J].JSAE Review,2002,23:309-315. (责任编辑刘舸) Modeling and Control for Vehicle to Vehicle Rear-End Collision ZHAO Feng1, JIN Zhi-lin1, FENG Bo2, ZHANG Lei1 (1.Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China;2.China Automotive Technology & Research Center, Tianjin 300300, China) Abstract:Road traffic statistics have shown multi-event crashes typically result in higher fatalities and injuries. The topic of analysis and stabilization control for vehicles involved in light vehicle-to-vehicle impacts were addressed. By developing a vehicle collision model through CarSim/Simulink simulations, the changing process and its stability rules of parameters of vehicle after crash were analyzed. Then a post-impact stability control (PISP) system was developed to attenuate undesired vehicle motions spin-out, induced by the initial impacts based on the instability of rear-ended vehicles after the crash. The system effectiveness was verified through CarSim/Simulink simulations for angled rear-ends collisions. Carsim and Simulink instance simulation results show that the strategy can guarantee the stability of the rear-ended vehicles and can reduce and avoid damage of secondary collision after rear-end collision. Key words:rear-end collision; vehicle to vehicle collision model; stability control 收稿日期:2015-12-10 基金项目:国家自然科学基金资助项目(11202096) 作者简介:赵锋(1990—),男,山东平原人,硕士,主要从事车辆碰撞研究;通讯作者 金智林(1978—),男,博士,副教授,主要从事车辆工程研究。 doi:10.3969/j.issn.1674-8425(z).2016.05.004 中图分类号:U462 文献标识码:A 文章编号:1674-8425(2016)05-0020-07 引用格式:赵锋,金智林,冯博,等.追尾碰撞的车辆稳定性分析与控制[J].重庆理工大学学报(自然科学),2016(5):20-26. Citation format:ZHAO Feng, JIN Zhi-lin, FENG Bo,et al.Modeling and Control for Vehicle to Vehicle Rear-End Collision[J].Journal of Chongqing University of Technology(Natural Science),2016(5):20-26.