舰艇编队自组网的拓扑自主优化控制
2016-06-11 17:13:00王锋舒黎忠
科技资讯 2016年10期
王锋 舒黎忠
摘要:研究基于多域认知的舰艇鳊队自组网拓扑自主优化与适变控制机制,提出一种自主优化与适变控制相结合的递进式拓扑控制方案,通过网络初始化部署和运行中的动态维护,实时优化网络拓扑,适变控制由事件触发,在网络性能下降或发生故障时,采用链路调整和节点调整两种手段,恢复网络性能。
关键词:舰艇编队 自组网 自主优化控制
中图分类号:E11 文献标识码:A 文章编号:1672-3791(2016)04(a)-0005-02
利用舰艇编队自组网的多域认知功能,根据每个子网里,服务类型种类的区别,来产生面向不同服务类型的网络拓扑结构,从而可以提高网络的容量,提高网络的安全性和可靠性。
该文以上层应用中的通信类型为例,设计一种保证网络连通性,且面向服务需求的基于最小权重方式的拓扑控制算法。
1.舰艇编队自组网的拓扑构建
在初始拓扑图G的基础上,按照链路的权重大小对邻居节点的个数进一步减小,建立出定向的邻近图。
为了能够使链路的可靠性提高,同时误码率降低,要进行链路权重指标设置,该指标可以反映出所收到的数据帧的质量。计算公式如下为
在信息收集阶段确定了网络的初始拓扑图G后,节点在所生成的拓扑图中按下列标准构建有向邻近图,形成新拓扑图G。确定邻居节点集的规则定义如下:如果v∈Ne(u)(节点u经过信息收集阶段确定的邻节点集合),即d(u,V)≤Ru。依据上述规则,构建出定向邻近图G。
2.舰艇编队自组网的拓扑优化
异构无线自组网在拓扑控制过程中存在很多单向链路。首先构建一个基于图G的双向连通拓扑子图的初始化图G,在初始化子图的基础上再进行定向邻近图(图G)的构建。最后通过对方向链路的添加或删除从而将图G里的单向链路都变为双向的链路。
该文所提出算法主要的思想为在对初始化的拓扑图G里双向的链路进行保留的基础上来构成初始化的拓扑子图G'。
因为人们将网络根据节点的密度不同而分为不同区域,所以按照区域不同用不同措施来进行分别优化。当某个区域的节点的密度比较大时(即K值比较大),为了可以使网络容量增大,笔者通过将方向性的链路进行删除从而保证网络是双向连通的;当一个区域的节点密度比较小时(即K的值比较小),为了防止将网络进行分割,可以通过进行方向性链路添加的办法来保证网络双向的连通。
3.仿真分析
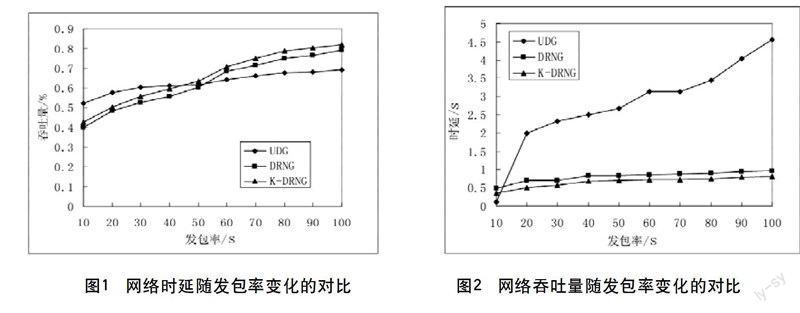
该文的算法通过NS2网络仿真软件进行仿真,笔者将该文的算法记为K-DRNG,将节点均匀地分布到750 km×750 km大小的方形区域中,网络中节点个数为16个,网络业务是CBR流,其每个报文长度是512字节。设节点通信半径为250~300km的范围内随机分布。并将仿真的结果和UDG、DRNG两种典型算法的到的节点的平均时延和吞吐量随着负载变化的结果进行了比较。
根据图1及图2的结果能够看出,因为K-DRNG是通过增加定向天线的传输距离来提高性能的,所以其网络性能比由DRNG方法得到的網络性能要好。若网络的负载比较大,则由K-DRNG具有最小的网络时延和最大的吞吐量。当负载大小逐渐变大时,KDRNG可以使邻接节点的个数进一步减少,因此通信干扰也会进一步降低,网络时延随之变小,吞吐量增大。
4.结语
该文提出一种自主优化与适变控制相结合的递进式拓扑腔制方案,通过网络初始化部署和运行中的动态维护,实时优化网络拓扑,适变控制由事件触发,在网络性能下降或发生故障时,采用链路调整和节点调整两种手段,恢复网络性能。仿真结果证明了该文提出的拓扑控制算法可以提高网络性能,增加吞吐量。