用于井下电机车储能电池模拟器的自适应模糊PI控制∗
2016-06-03 07:26:49周亚夫刘光起弯茂全许辰雨北京工业职业技术学院北京市石景山区0004北京工业大学电子信息与控制工程学院北京市朝阳区004
中国煤炭 2016年5期
周亚夫刘光起弯茂全许辰雨(.北京工业职业技术学院,北京市石景山区,0004; .北京工业大学电子信息与控制工程学院,北京市朝阳区,004)
用于井下电机车储能电池模拟器的自适应模糊PI控制∗
周亚夫1刘光起1弯茂全2许辰雨1
(1.北京工业职业技术学院,北京市石景山区,100042; 2.北京工业大学电子信息与控制工程学院,北京市朝阳区,100124)
摘要为了解决煤矿井下电机车电池组充放电过程缓慢而造成电池组相关试验效率低和过程复杂的问题,采用全桥整流器结构的电池模拟器,模拟电池组充放电过程中的输出电压与电流等外在特性。为了保证电池模拟器在充放电过程的不同阶段、充放电模式切换以及负载突变等情况下,其外在特性尤其是输出直流电压仍能够保持稳定并且更加接近直流电压源的特性,提出了采用自适应模糊PI控制策略提高电池模拟器的动态性能和稳定性。
关键词电机车电池组 电池模拟器 自适应 模糊控制
1 前言
煤矿井下高瓦斯环境的特殊要求,要求采用蓄电池组替代一般的架线直流电网为电机车供电。目前,煤矿井下电机车常用对环境污染小、能量密度高、寿命较长、自放电率较小、温度适应范围大以及安全系数高等诸多优点的磷酸铁锂电池替代传统的铅蓄电池作为电源,提供稳定的250 V或550 V直流电压和数百安培电流。
在蓄电池作为负载或供电电源的试验中,由于蓄电池充放电过程过于缓慢而导致试验效率低、成本高和过程复杂。在电机车电机调速和蓄电池充电系统等研究中,需要某种变换器或模型模拟电池的充放电特性以提高试验效率。因而电池准确的动态建模是电池非化学等效过程研究的重点,也是电池外部特性研究的难点。
目前对电池动态模型建模的常用方法有简化的电化学模型、神经网络模型和等效电路模型。在利用电池动态模型描述电池工作过程中性能影响因数的数学关系中,电池的工作电压、工作电流以及SOC(电池荷电状态)尤为重要,然而以上的建模方法对于电机车电池组这种容量较大的情况并不适用。
因此,采用具有全控能力的大功率电力电子变换器模拟电机车电池组充放电过程中的电压、电流以及SOC特性是解决以上问题的良好选择。为了模拟电池的储能特性,需要模拟器具有吸收能量的能力;为了模拟电池的直流电压源特性,需要模拟器具备稳定的直流输出电压的能力。为此应选择整流器的逆变与整流过程分别模拟电池充电与放电特性。模拟器利用闭环控制使其直流侧电压在负载突变的情况下仍能保持类似电池的惯性,但是对于目前广泛应用的线性PI控制而言,很难保证其电压的稳定性,为此应采用模糊自适应线性控制器保证系统的动态品质和稳态性能。
本文采用三相全桥整流器并通过自适应模糊PI控制作为储能电池模拟器,通过仿真与试验验证可以实现蓄电池模拟器在恶劣负载扰动的情况下其直流侧输出仍能维持稳定,以此说明模拟方法的有效性和准确性。
2 储能电池模拟器结构及工作特性
2.1储能电池模拟器结构
储能电池模拟器试验系统结构图如图1所示,储能电池模拟器所采用的三相全桥整流器拓扑结构图如图2所示,图中Q1~Q6是IGBT,L为滤波电感,uo为储能电池两端电压。
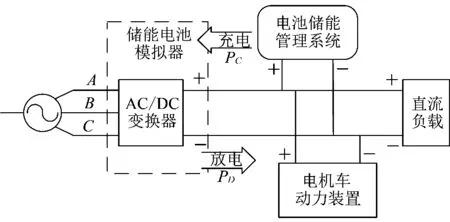
图1 储能电池模拟器试验系统结构图
2.2储能电池模拟器的工作特性
储能电池模拟器在整流状态时,直流输出为电机车动力装置与直流负载;逆变状态时电池储能管理系统为其充电,由于储能电池模拟器不具备储能能力,因而将其能量并入电网。电池荷电状态是电池在一定的放电倍率下,其可用电量与额定容量的比值,可表征电池内部的剩余能量;由于电池的SOC是电荷量的比值不仅与电流有关,还取决于电池电压。将充满电的磷酸铁锂电池以不同电流进行放电试验,得出不同放电倍率下的放电曲线如图3所示。
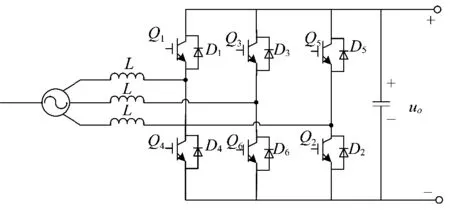
图2 储能电池模拟器拓扑结构图
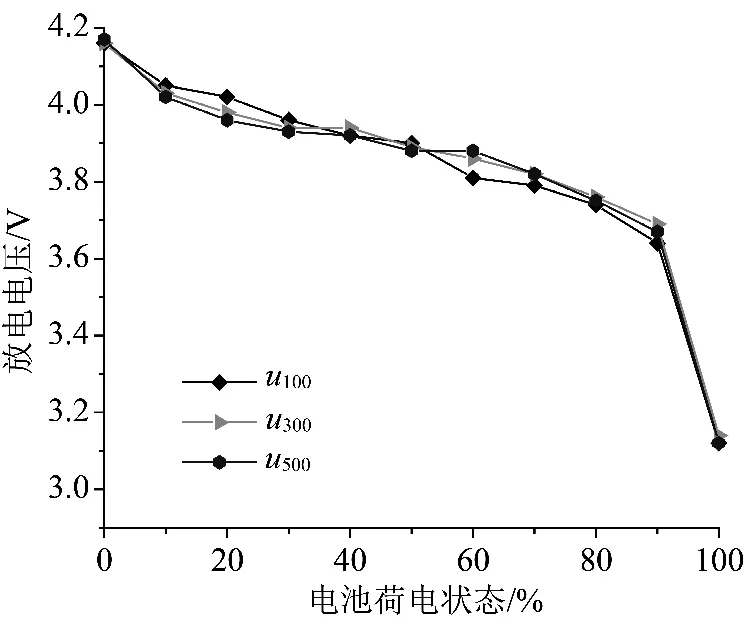
图3 不同倍率下的放电曲线
通过对电池充电过程进行类似的试验,发现电池在充放电过程中分为3个阶段:
(1)电池充电初始阶段(SOC:0~10%),电池以恒电流方式运行,电压以0.125的斜率放电或充电。
(2)电池充放电中间阶段(SOC:10%~90%),此阶段电池以0.0375的斜率缓慢变换,即近似恒电压的方式运行。
(3)电池充电结束阶段(SOC:90%~100%),电池以恒电流方式运行,电压以0.125的斜率放电或充电。
3 储能电池模拟器模型与控制
电池充放电过程中第二阶段的近似恒电压模式,电池模拟器精确且平稳地控制直流侧电压输出;电池充放电过程中第一阶段和第三阶段的恒流模式,双闭环控制脱掉电压外环控制,将电流内环的输入给定设为合理的常数值,此时直流侧电流维持精确且平稳恒定。经典PI控制器的比例与积分环节参数固定且鲁棒性差,不能满足在负载突变和两种模式自由情况下系统的动态及稳态要求。因而通过对经典双闭环控制器中电压外环v-PI控制器进行自适应模式改进,提高控制器性能,电池模拟器双闭环自适应模糊PI控制结构图如图4所示。
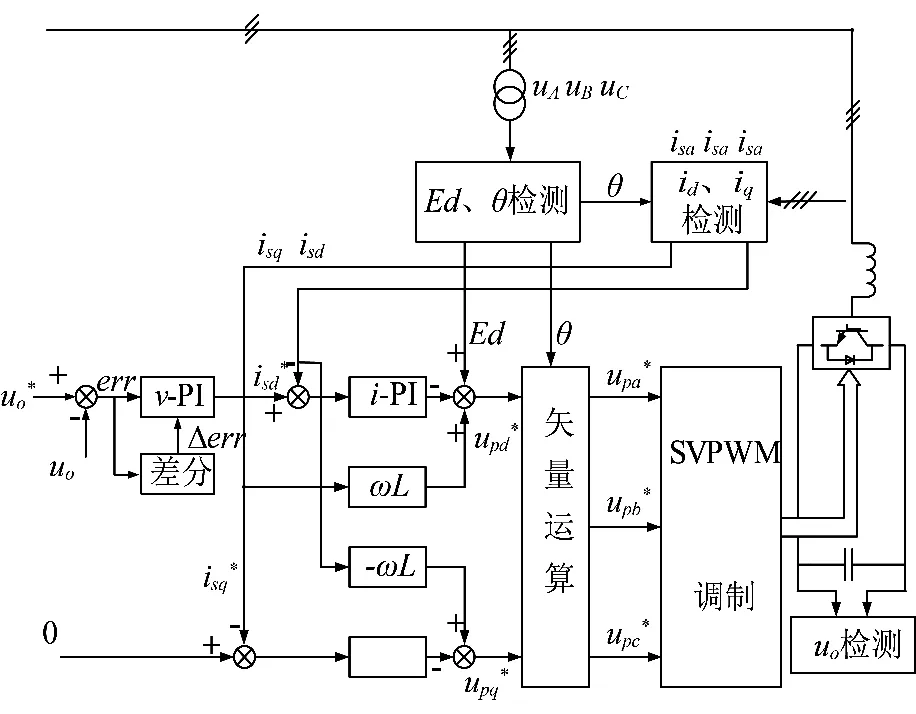
图4 电池模拟器双闭环自适应模糊PI控制结构图
4 双闭环模糊PI控制器设计
4.1自适应控制表达式
假设直流侧电压的变化误差为err,其差分输出量为Δerr,二者共同作为电压外环自适应控制器的输入,通过控制器比例(Kp)与积分(Ki)运算得到电流内环的控制输入量i∗sd和i∗sq。为了使线性控制器更好地抑制电压变化,需要对PI参数在原控制点进行一定量的调整(ΔKp与ΔKi),即自适应控制器表达式见式(1):

式中:Kp(t)——控制器比例环节参数随时间t变化的函数;
ΔKp(t)——控制器比例环节参数的改变量随时间t变化的函数;
Ki(t)——控制器积分环节参数随时间t变化的函数;
ΔKi(t)——控制器积分环节参数的改变量随时间t变化的函数;
Kp(0)、Ki(0)——分别为初始控制点参数。
当err与Δerr都为正时,需要ΔKp为正,以提高变换器的响应速度;当err为负,并且Δerr为正时,需要ΔKp为负,抑制变换器超调;当err 与Δerr都趋近零时,需要ΔKi为正,稳定提高变换器输出。然而对于err、Δerr、Kp、Ki、ΔKp与ΔKi这6个变量而言并非在同一变化量度内,如何正确评价err与Δerr的变化幅度与速度是自适应实现的关键。
4.2模糊论域与模糊规则
由于模糊自适应控制系统会在基准值附近动态的调整PI参数,所以模糊词集的选择就与PI参数的变化范围和变化精度有关,故模糊词集分为正负,而词集的正负个数由经验获取。如果数量太多,会导致模糊规则过于复杂,且在某一范围内的模糊规则输出类似,没有必要;而数量太少,会导致划分不细致,导致变化过大,响应过程易产生突变,尤其是积分作用的影响会累积于整体过程,调节时间会增加,一般选取7个,正负各3个加上1 个0比较合适。而隶属度函数是基于模糊词集的个数选择影响,每一个模糊词集对应的隶属度函数形状与范围会影响最终的输出结果,即PI变化值的大小,为等价各模糊词的作用范围,选择等间隔的三角形隶属度函数比较合适。
所以为了使err、Δerr、ΔKp与ΔKi的变化幅值范围映射在相同的变换范围,采用模糊推理,并选定模糊词集为NB、NM、NS、ZO、PS、PM以及PB的隶属度函数,err、Δerr、ΔKp及ΔKi的隶属度函数如图5所示。其中,由变换器直流侧电压最大变换范围确定映射系数,因此图5横轴的模糊论域为[-6,6];直流电压在此模糊论域内的最大阶跃应限制在纵轴所对应的比例范围内,避免超出。
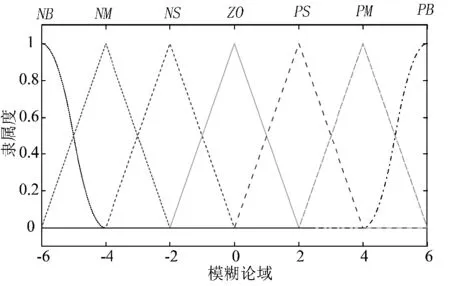
图5 err、Δerr、ΔKp及ΔKi的隶属度函数
模糊规则与模糊隶属度函数共同决定输出值, 即PI变化范围。而模糊规则由PI控制参数对系统响应过程的定性作用决定,即PI对误差与误差变化率改变的趋势作用。如当误差比较大,需增大P作用以增加响应速度,而适当减小或是不改变I,以避免积分饱和引起的动态响应的震荡。至于变化的量值则需由模糊规则的输出及输出的隶属度函数作用。根据PI控制器原理可知,比例系数Kp可以提高变换器的动态性能,提高输出跟踪给定的能力;而积分系数Ki可以抑制变换器调节过程中的振荡,保持变换器的稳定。当输出电压与给定相差较大且有增大的趋势时,应尽可能的提高Kp;而输出电压与给定相差趋近时,应降低Kp增大Ki,使系统稳定。结合图5中变量的隶属度函数及以上自整定原则,建立起适合PI控制系数Kp与Ki具体变化情况的模糊规则,其模糊规则见表1和表2。
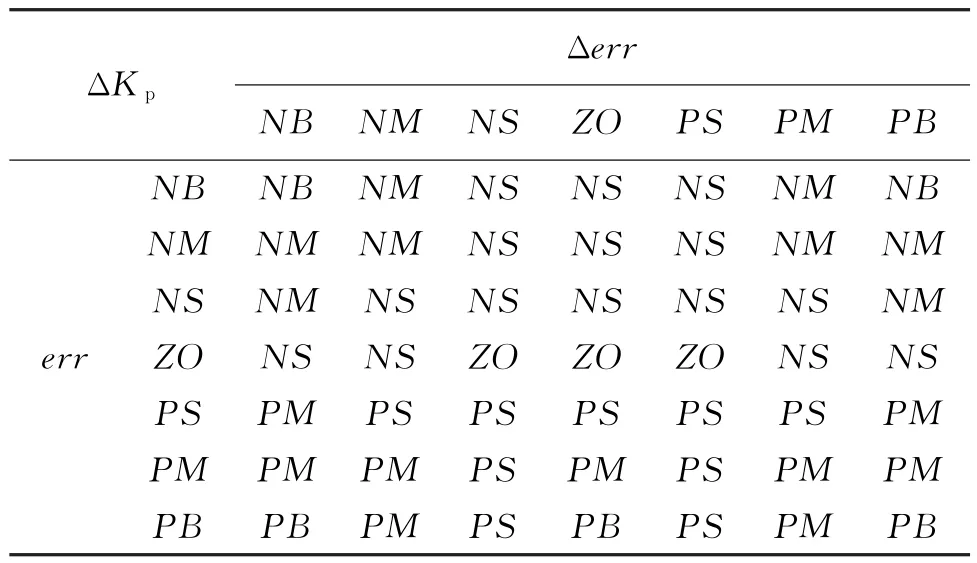
表1 ΔKp模糊规则
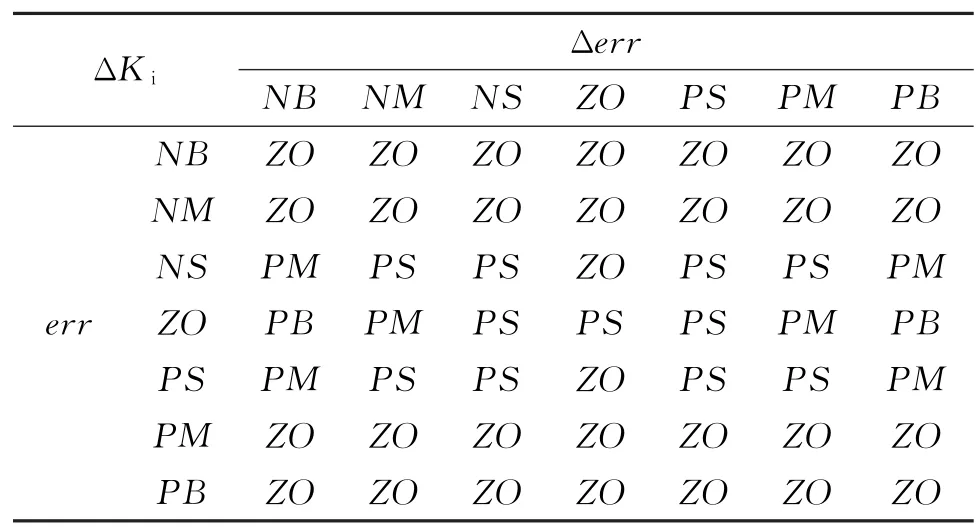
表2 ΔKi模糊规则
5 仿真与试验验证
根据以上分析,本文利用Simulink设计仿真电池模拟器在恒电流模式下试验,设置参数如下:直流输出恒定电流idc为140 A,滤波电感L为2 m H,输出滤波电容C为2000μF,开关频率fs为5 k Hz。在0.15 s时负载电抗由8Ω突变为11Ω,自适应模糊控制与经典控制在恒电流模式下直流电压仿真对比图如图6所示。
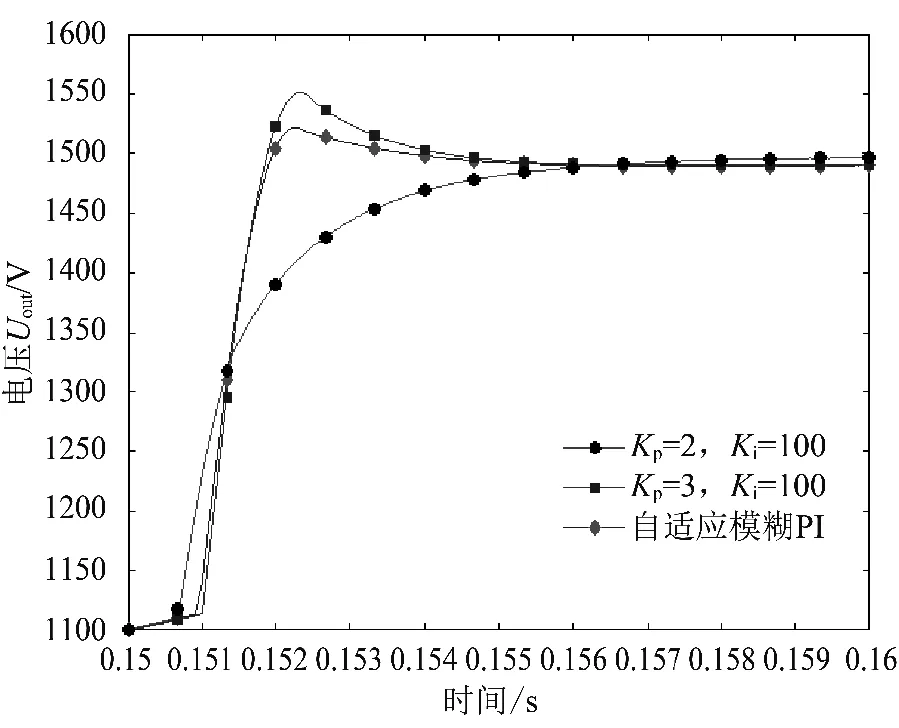
图6 自适应模糊控制与经典控制在恒电流模式下直流电压仿真对比图
由图6可以看出,传统PI控制器的两组PI参数,分别是Kp1为2、Ki1为100和Kp2为3、Ki2为100,两组数据仅在比例环节有微小差别,但直流输出电压的控制效果区别明显:在Kp1和Ki1参数控制下,直流电压变化迅速且振荡时间较短,但过冲较大;在Kp2和Ki2参数控制下,直流电压变化平稳且振荡不明显,但动态性能不好;采用自适应模糊PI控制器控制效果显著,兼顾了两组参数的优点。
将自适应模糊PI控制器用于电池模拟器试验平台,通过比较恒电压模式下经典PI控制器与自适应模糊PI控制器在负载突变情况下,电池模拟器直流输出的控制效果,自适应模糊PI控制与经典PI控制在恒电压模式下直流母线电压试验对比图如图7所示。
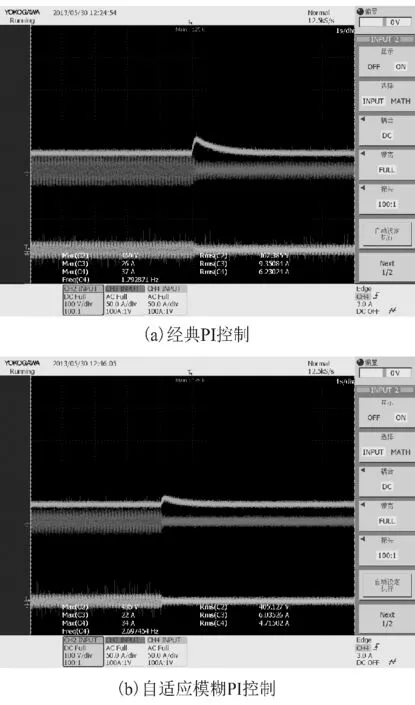
图7 自适应模糊PI控制与经典PI控制在恒电压模式下直流母线电压试验对比图
由图7可以看出,稳态下直流电压恒定为405 V,加入负载突变扰动,经典PI控制下电压过冲超过60 V;而同样条件下,自适应模糊PI控制下直流电压过冲明显减小为30 V。
6 结论
本文提出了一种用于储能电池模拟器的自适应模糊PI控制方法,利用电压误差信号及误差变化量,动态修正电压外环v-PI控制器参数,提高系统的自适应能力,相较传统PI控制器响应时间短且控制精度高。
参考文献:
[1]张勇,甘波平.锂离子蓄电池在煤矿便携式仪器仪表中的安全使用[J].煤矿安全,2011(6)
[2]王致杰,肖兴媛,王耀才等.充电机功率与免维护蓄电池容量的优化选择[J].中国煤炭,2003(6)
[3]尹鹏.矿用锂电池组并联均流控制技术的研究[D].安徽理工大学,2013
[4]张彩萍.电传动车辆锂离子电池荷电状态估计与峰值功率预测研究[D].北京理工大学,2010
[5]林成涛.电动汽车用镍氢电池组的建模及管理技术研究[D].清华大学,2005
[6]文锋.纯电动汽车用锂离子电池组管理技术基础问题研究[D].北京交通大学,2010
[7]李庆春,沈德耀.一种PID模糊控制器(fuzzy PI+fuzzy PD型)[J].控制与决策,2009(7)
(责任编辑王雅琴)
Self-adaptive fuzzy PI control of energy storage battery simulator for mining underground locomotive
Zhou Yafu1,Liu Guangqi1,Wan Maoquan2,Xu Chenyu1
(1.Beijing Polytechnic College,Shijingshan,Beijing 100042,China; 2.The College of Electronic and Control Engineering,Beijing University of Technology, Chaoyang,Beijing 100124,China)
AbstractIn order to solving the problem of low efficiency and complex process in battery pack relative experiments leading by slowing of charge-discharge process,the authors took battery simulator with full-bridge rectifier to simulated output voltage and current characteristics of battery pack during charge-discharge process and provided that using self-adaptive fuzzy PI control strategy to improve dynamic property and stability of battery simulator and the external characteristics could remain stable and closer to DC voltage source characteristics particularly output direct voltage under the circumstances such as different stages of charge-discharge,switch charge-discharge modes and load suddenly changing.
Key wordsbattery of electric locomotive,battery simulator,self-adaptive,fuzzy control
中图分类号TD601
文献标识码A
基金项目:∗北京市教委科技平台支柱项目(KM2013-014225)
作者简介:周亚夫(1974-),男,河北唐山人,硕士、讲师,现任职于北京工业职业技术学院,主要从事电气控制方面的教学和研究工作。
猜你喜欢
中国教育信息化·基础教育(2016年11期)2016-12-27 19:17:45
软件导刊(2016年11期)2016-12-22 21:30:47
科技视界(2016年26期)2016-12-17 15:53:57
科教导刊·电子版(2016年26期)2016-11-21 09:41:18
汽车科技(2016年5期)2016-11-14 08:03:52
中国新通信(2016年16期)2016-10-18 10:54:54
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
西北工业大学学报(2015年1期)2016-01-19 03:29:52