
太阳能双轴聚光跟踪控制设计与优化
2016-06-02 09:12:22沈磊,姜晨
上海理工大学学报 2016年2期
沈 磊, 姜 晨
(上海理工大学 机械工程学院,上海 200093)
太阳能双轴聚光跟踪控制设计与优化
沈磊,姜晨
(上海理工大学 机械工程学院,上海200093)
摘要:针对聚光光伏跟踪控制的要求,设计了一种改进型的太阳能双轴跟踪控制系统,并对控制系统进行了优化.系统采用一种新型太阳位置算法ENEA(2007),高度角和方位角的最大误差不超过0.002 7°;硬件平台采用STM32系列芯片作为系统的控制核心,在电机控制追踪精确度方面进行了优化.经现场实验测试,该控制系统运行稳定可靠,整体误差较低.
关键词:STM32系列芯片; 太阳位置算法; 双轴跟踪
太阳能的发展与利用一直是新能源发展的重要方向,也是世界各国大力研究与应用的重点.在众多新能源中,太阳能作为一种新能源,有取之不尽用之不竭、普遍存在、经济方便等众多优势[1].研究表明,与固定式和单轴跟踪式相比,双轴跟踪式对太阳能的利用率最大[2],能量接收效率能提升30%以上,因此,对太阳能双轴跟踪控制的研究具有实际意义.
太阳能双轴追踪主要有光电式和视日式两种.光电追踪主要是根据光电传感器感应光线强度的变化产生反馈信号,通过控制器来调整镜面位置.而视日追踪主要是根据太阳位置算法算出当前太阳的位置,然后驱动控制设备使之达到预定位置.光电追踪虽然精确,但是,在阴天等天气时不能发挥作用,对光照条件要求很高.视日追踪是利用算法得到某个位置不同时刻的太阳的位置,然后控制系统发出指令使得跟踪装置达到指定位置.视日追踪环境适应好、可靠度高.
根据视日跟踪的原理,本文设计了一种改进型的太阳能双轴跟踪控制系统,对控制算法进行了优化.仿真与实验结果表明:该优化设计能有效提高系统控制精度,同时增强控制系统运行的可靠性与稳定性.
1控制系统整体设计
太阳视日跟踪示意图如图1所示,太阳光线与地平面的夹角为е,即为高度角;在地平面的投影与正北的夹角为Γ,即为方位角.光伏双轴跟踪控制装置在对太阳进行跟踪时,必须保证光伏板的法线与太阳光的方向相同,才能对太阳进行准确的跟踪.
现根据太阳视日跟踪的原理进行控制系统设计.控制系统是利用现场控制器,根据太阳位置算法得出当前时间的太阳位置,然后发送指令驱动方位轴和高度轴电机转动,使装置转动到预定位置,完成对太阳的实时追踪,其原理图如图2所示.

图1 太阳视日跟踪原理图
控制系统采用意法公司的STM32F103RE芯片为控制核心.装置的高度角位置反馈通过倾角仪与控制器进行485通讯完成;方位角位置反馈是利用控制器对霍尔传感器进行捕获得到;方位轴电机和高度轴电机驱动是靠两路互补的PWM波和驱动电路实现[3].专用时钟芯片用于系统时间的精确计算,保证了计时的稳定性与准确性.控制器与上位机的通讯利用modbus485协议[4].通过对风速仪的频率捕获来实现实时风速的测量.
2太阳位置算法优化
太阳位置主要由太阳光线的高度角e和方位角Γ来表示.方位角的定义如下:以正北为0,北偏东为正.太阳能双轴跟踪控制系统是对太阳位置的追踪,因为,太阳光线的位置每时每刻都是变化的,而且随时间的变化规律也不一样,每一天也是不同的.太阳方位用高度角和方位角表示,这2个参数的大小由地理纬度φ、地方时角H和太阳赤纬角δt共同决定[5].
(1)

(2)
对地理纬度、地方时角和赤纬角这3个参数的计算精确程度决定着太阳位置算法的精度.高精度的太阳位置算法可以减少系统误差,提高太阳追踪的准确性,提高发电效率.目前精度最高的太阳位置算法是SPA(2004)[5],其最大误差是0.000 3°,有效年份在公元前2 000年到公元6 000年.由于SPA算法综合考虑了章动、大气折射、光行差、赤经对时间的修正、地心与地面的坐标转换等大量的校正计算,并给出了许多复杂的校正参数,导致算法复杂、计算量庞大,不适合植入嵌入式内核进行计算.
本文采用另一种高精度的位置算法ENEA(2007),最大误差只有0.002 7°[6].ENEA同SPA一样考虑了章动、大气折射、地心与地面的坐标转换、视差矫正、月球摄动等对于太阳方位的影响.ENEA同SPA相比,作了很多简化,没有很多复杂的矫正参数.ENEA算法的地方时角和赤纬角(以地面某点为中心)为
(3)

h=6.300 388 099 03tG+4.882 462 3+

(4)

(5)

(6)
式中:Δα是赤经角的视差矫正;Δγ为章动的地心经度矫正;θ为地理经度;α为地心太阳赤经角;tG为儒略日;δ是以地心为中心的太阳赤纬角;ε为地球旋转轴的倾斜角;γ为地心太阳经度;h为地方时角(未经校正).
同时,对于高度角的矫正还增加了同SPA一样的大气折射的矫正Δe[5].
Δe=0.084 217P/[(273+T)tan(e0+
0.003 137 6)/(e0+0.089 16))]
(7)
式中:P为大气压强;T为温度;e0为不考虑大气折射校正的太阳高度角.
ENEA算法对SPA算法作了许多的简化与改进,在保证精度的同时,大大简化了计算.与其他常用算法相比,ENEA计算量相差不大,但是,精度高出许多.
为验证实际效果,利用Visul C++6.0开发环境开发了SPA,ENEA,PSA这3种算法.PSA是一种常用的高精度太阳位置算法,文献[7]中PSA的算法精度为0.008°,但其适用年限为1999~2015年.由于SPA算法精度最高,在很多相关研究中都将SPA当作太阳年历,可以用来检验其他算法的精度.以2015年5月份上海某地的太阳高度角和方位角数据(每天8:00—16:00)为例,对3种算法进行仿真比较,得出仿真数据.图3是太阳的高度角和方位角随一天时间S的变化情况.图4为ENEA与SPA相比的一天的误差变化情况θ1.图5是ENEA在5月份30天的误差变化情况θ2.图6是PSA在5月份30天的误差变化情况θ3.
由于在Visul C++6.0仿真中,3个算法地理位置信息输入存在误差,因此,仿真结果会有微小的误差.研究发现2个算法的误差每天的趋势大致相同.由图6可以看出,PSA算法的误差明显比较大,高度角误差超过0.5°,方位角最大误差已经超过1°,不再适合使用.由图5得出,ENEA方位角最大误差不超过0.015°,高度角最大误差不超过0.007°.如图4所示,通过一天的比较发现,ENEA高度角误差在中午之前相对较小,从中午时刻开始慢慢变大;方位角误差在中午时刻达到最大,其他时间相对较小,误差保持在一个很小的范围之内,同时,比较稳定.因此,ENEA算法比较可靠.

图3 一天中高度角、方位角的变化(6:00—18:00)
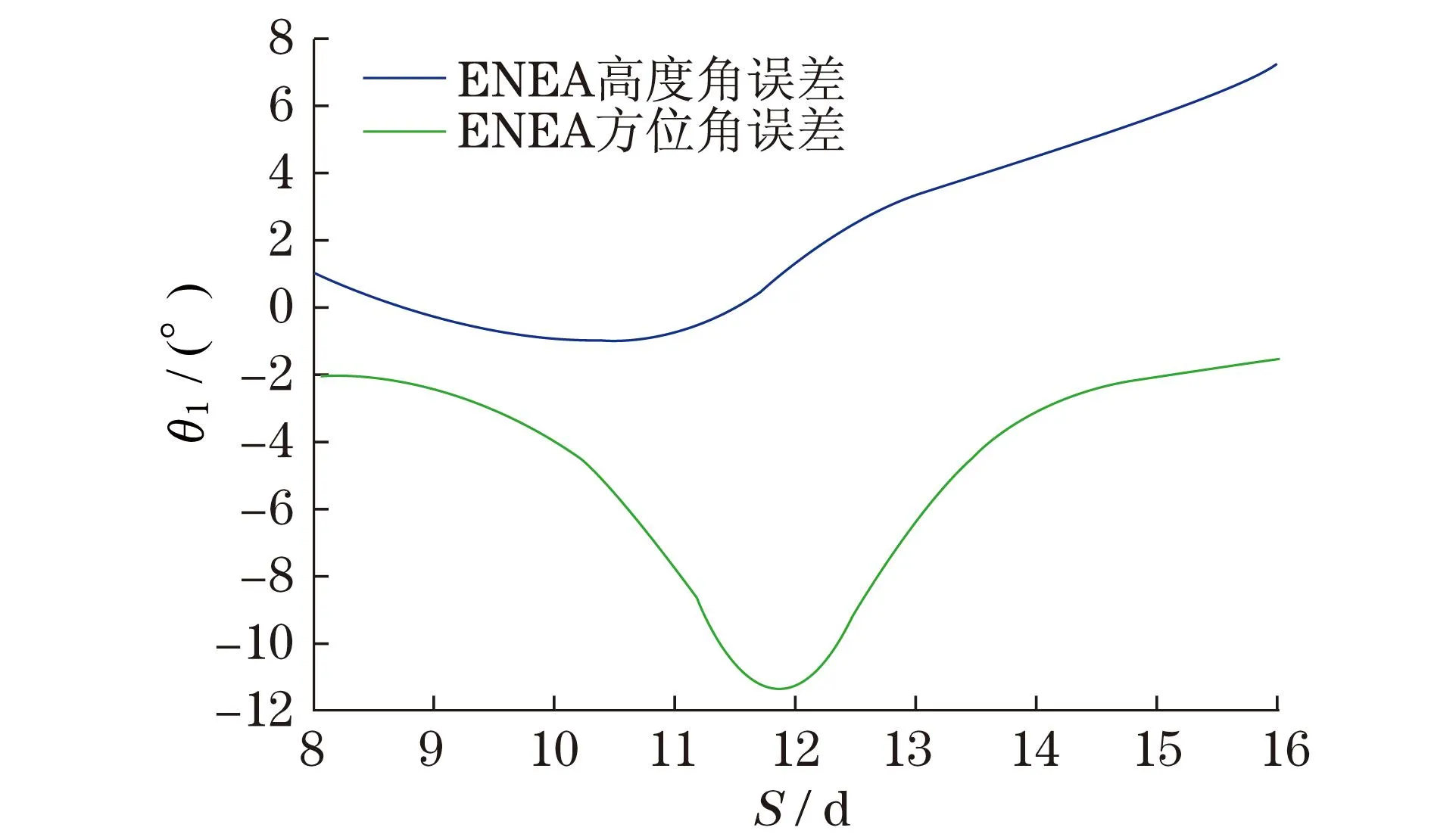
图4 ENEA算法一天误差

图5 ENEA 2015年5月误差
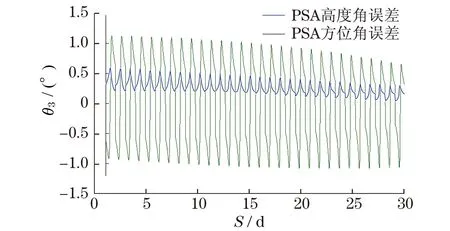
图6 PSA 2015年5月误差
表1是3种算法计算复杂程度的比较.可以看出,PSA与ENEA计算复杂程度相差不大,都不是很高;而SPA比前两者高出10倍以上,十分复杂,计算耗时最大.因此,通过仿真分析和实际比较,ENEA算法最优.在保证算法高精度的同时,计算复杂程度也保持在一个合理的范围之内.
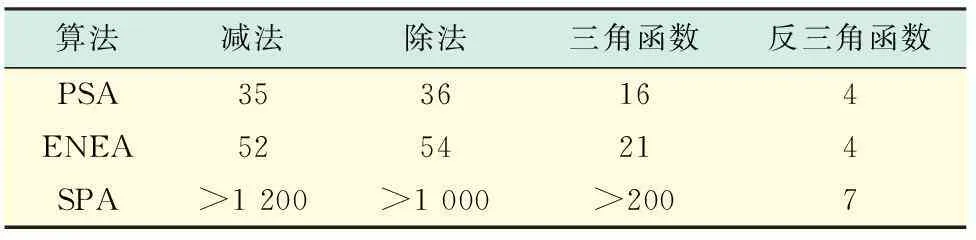
表1 算法数学计算次数比较
现场聚光光伏装置发电主要是靠光伏镜面(电池板)吸收太阳光线并转化为电能,必需保证镜面与太阳光线垂直,电能转化率才会达到最大.光伏镜面的位置同样由高度角和方位角组成.为保证光伏镜面与太阳光线保持垂直,根据几何位置,它的高度角与太阳的高度角互余,方位角与太阳的方位度角相同.
3软件设计与优化
软件设计优化的思路是首先根据时钟芯片算出当前时间,然后由太阳位置算法计算出当前时间的太阳的高度角和方位角,进而得出镜面当前的高度角和方位角,也就是当前位置的理论值.读取倾角仪反馈的高度角,根据霍尔传感器的反馈脉冲换算出方位角,这两个角度值也就是当前位置的实际值.让电机转动一定的角度(理论值与实际值的差值),使得当前的实际角度接近理论值,这样保证了对太阳光线的精确追踪.
优化设计有4种模式:手动模式、自动模式、保护模式和本地模式.手动模式下能够手动调节镜面的高度角和方位角.自动模式就是自动进行太阳位置的追踪.在保护模式下,装置的双轴会转到一个固定的位置,减小机械结构的破坏,系统在非工作状态和天气异常时都会进入保护模式.本地模式是上位机为主的一种模式,通过485总线相连上位机可以发送指令让装置(下位机)执行相应的操作.流程如图7所示.
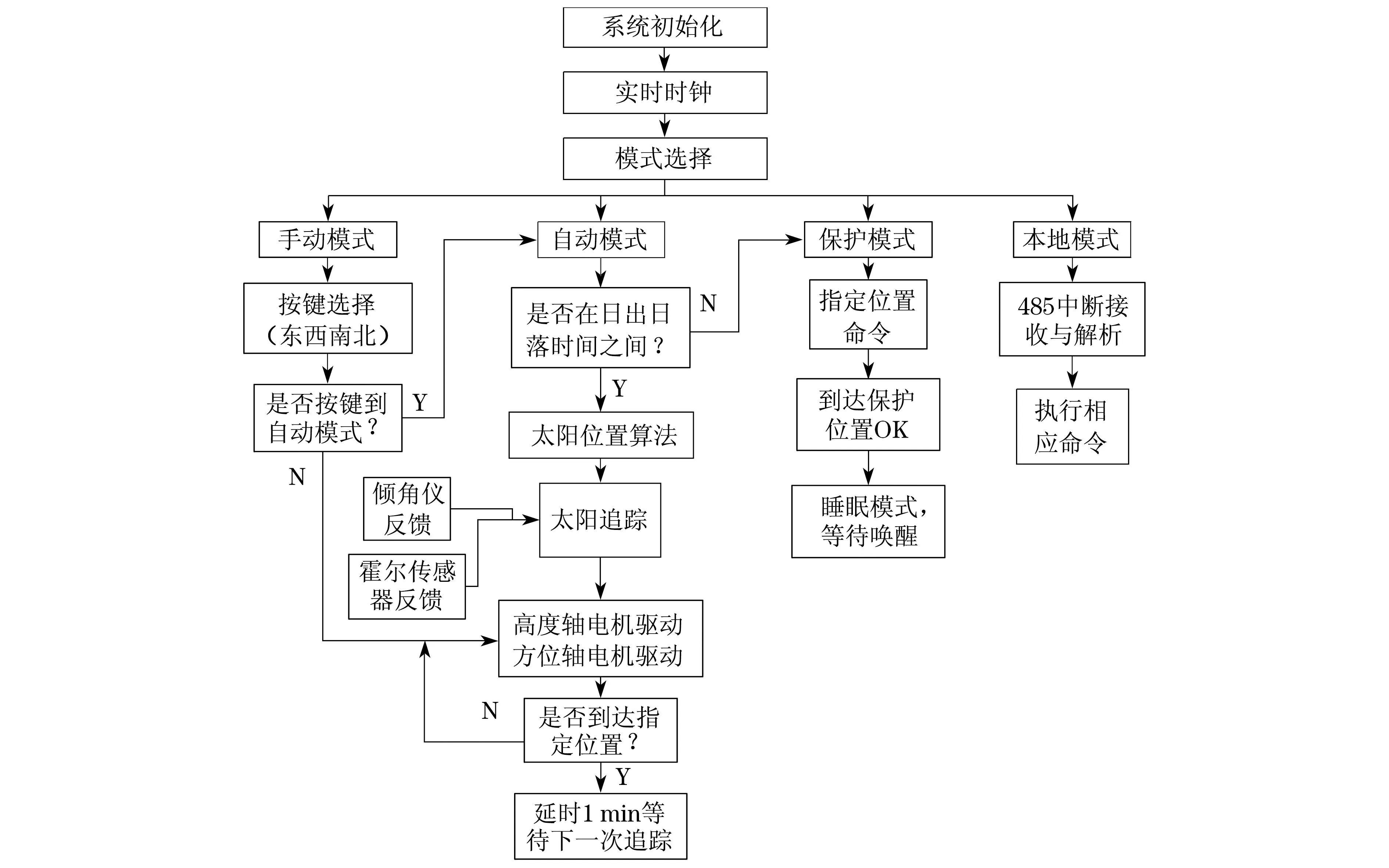
图7 程序流程图
系统完成一次太阳追踪后,需要一定的时间间隔再进行下一次追踪.如果间隔过短,频繁启动对电机的寿命会有影响;间隔时间过长,镜面位置偏离会增多,发电效率受到影响.根据估算,太阳位置变化为每分钟约0.2 °,本文设计让控制系统1 min执行一次追踪,减少了电机启动次数,同时也保证了追踪的精度.
由图2可知,太阳的方位(方位角的变化)在中午时刻变化最快,因此,考虑在中午时刻(11:00—13:00)提高追踪频率,让控制器30 s追踪一次,其他时间不变,以减小追踪误差.
4实验结果与分析
为了验证系统设计的精确度和可靠性,利用现有的机械实验装置进行实验,如图8所示.经过一段时间的运行,光伏装置的发电效率比较稳定.利用上位机与控制系统进行modbus485通讯2 d,每隔1 min记录1次,分别得出2015年5月20日与21日9:00—15:00装置实际的高度角和方位角,同理论的太阳位置的高度角、方位角进行比较,得出2 d的高度角和方位角的角度误差θ4和θ5,如图9和图10所示.可以看出,装置的高度轴误差最大达到0.3°,方位轴误差最大不到0.1°.
实验结果的误差主要由机械装置安装误差、电机的过冲、传动机构(回转减速装置)的传动误差、跟踪时间间隔(追踪频率)引起.实验结果基本满足了设计要求.如果需要进一步提高追踪的精度,需要对机械装置的安装误差进行矫正,电机和传动机构需要选用精度更高的产品;同时需要进行电机控制程序的调整,如缩短电机运转的频率等.

图8 实验装置
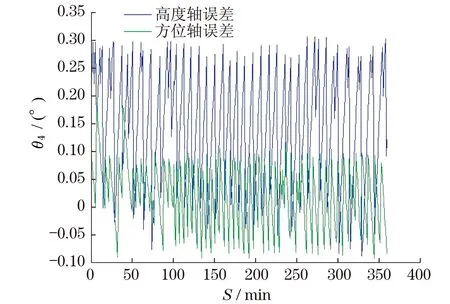
图9 2015年5月20号9:00—17:00点追踪误差

图10 2015年5月21号9:00—17:00追踪误差
5结束语
设计了一种基于STM32F103RE芯片的光伏双轴太阳能跟踪控制系统,并对其进行优化,采用精准的视日轨迹跟踪,主要有以下特点:软件算法层面,采用优化后的太阳位置算法ENEA,与之前采用的PSA算法相比,精确度有了很大的提高,计算量却相差不大;增加了保护模式,减少了机械装置在恶劣天气下的损伤;电机控制算法经过优化,不仅使得追踪误差下降,同时电机的启动次数减少,对电机有保护作用;同时增加了本地模式,方便上位机对系统装置的控制,增强了扩展性.
参考文献:
[1]Sen Z.Solar energy in progress and future research trends[J].Progress in Energy and Combustion Science,2004,30(4):367-416.
[2]窦伟,许洪华,李晶.跟踪式发电系统研究[J].太阳能学报,2007,28(2):169-173.
[3]袁涛.H桥功率驱动电路的设计研究[D].西安:电子科技大学,2006.
[4]喻金钱.STM32F系列ARM Cortex-M3核微控制器开发与应用[M].北京:清华大学出版社,2011.
[5]Reda I,Andreas A.Solar position algorithm for solar radiation applications[J].Solar Energy,2004,76(5):577-589.
[6]Roberto Grena.An algorithm for the computation of the solar position[J].Solar Energy,2008,84(5):462-470.
[7]Blanco M M,Padilla A D C,Moratalla L T,et al.Computing the solar vector[J].Solar Energy,2001,70(5):431-441.
(编辑:石瑛)
Dual-Axis Tracking Control Design and Optimization of Solar Concentrator
SHEN Lei,JIANG Chen
(School of Mechanical Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
Abstract:In view of the requirement of photovoltaic tracking control for concentrator,a kind of advanced solar dual-axis tracking control system was designed and optimized.In the system a new type of solar position algorithm ENEA(2007) was used and the maximum error of azimuth and zenith is below 0.002 7 °.In the hardware platform,the series of STM32 chip was adopted as the core control system,and the tracking reliability of the motor control was also optimized.The field testing and measurement show that the operation of control system is stable and reliable,and the overall error remains at a low level.
Keywords:STM32 chip; solar position algorithm; dual-axis tracking
中图分类号:TP 273
文献标志码:A
通信作者:姜晨(1978-)男,副教授.研究方向:精密加工与检测、控制系统.E-mail:jc_bati@163.com
收稿日期:2015-08-02
DOI:10.13255/j.cnki.jusst.2016.02.014
文章编号:1007-6735(2016)02-0177-05
第一作者: 沈磊(1990-),男,硕士研究生.研究方向:太阳能控制系统.E-mail:shenlei820843@163.com
