平面四杆机构运动的矩阵分析
2016-06-02 01:43:40余敏海军蚌埠士官学校安徽蚌埠233012
高教学刊 2016年3期
余敏(海军蚌埠士官学校,安徽 蚌埠 233012)
平面四杆机构运动的矩阵分析
余敏
(海军蚌埠士官学校,安徽蚌埠233012)
摘要:平面四杆机构是组成多杆机构的基础。在已知机构尺寸和原动件运动规律的情况下,通过建立从动件运动的数学模型,可以分析、确定机构的各种性能指标。矩阵模型方便分析有关机构运动及性能的综合问题,而且计算精度高。
关键词:四杆机构;运动;矩阵;分析
Abstract:The planar four-bar mechanism is the foundation of the multi-bar mechanism. In the case of knowing the size of the mechanism and the motion law of the prime motion,the various performance indicators can be ana-lyzed and determined by the establishment of the follower motion mathematical model. Matrix model is convenient to analyze the comprehensive problems of the mechanism motion and performance,with high precision computing.
Keywords:Four-bar mechanism; motion; matrix; analysis
平面四杆机构由四个刚性构件通过低副联接而成,各个运动构件均在同一平面内运动。它能够实现多种运动规律和运动轨迹的要求,结构简单,传动性能较好,是平面连杆机构中最常见的形式,也是组成多杆机构的基础。
一、四杆机构运动的分析
(一)分析的内容
平面四杆机构的运动分析是高职《机械原理》课程的重要内容。机构运动分析的内容就是在已知机构的主动输入、构件尺度的情况下,确定所有装配构件并从中选优,确定从动件的位置、角位移、角速度和角加速度,确定从动件上某些点的轨迹、位移、速度和加速度,从而分析、评价机构是否符合设计要求,标定机构的工作性能指标。(如表1所示)
(二)分析的方法
机构运动分析的方法有图解法和解析法,矩阵法是解析法的一种,即利用矩阵模型将机构的未知运动参数与已知运动参数、尺寸参数间的函数关系表达出来,对机构运动进行分析。其优点是数学推理严谨,计算精度高,方便把机构分析和机构综合问题联系起来作一个运动循环过程的研究,从而获取最优方案。
矩阵分析四杆机构运动的一般思路是:在直角坐标系中,由机构的几何条件,建立机构的位置矢量方程,再改写为分量方程,然后对其求关于时间的一阶导数,得机构的速度(矩阵)方程,求二阶导数得到机构的加速度(矩阵)方程。
二、四杆机构运动数学模型的建立与矩阵分析
如图1所示,设各构件的尺寸已知,构件4重合于x轴;在图示位置原动件1的初始转角θ1和等角速度ω1已知。确定(1)构件2、3的角位移、角速度及角加速度;(2)连杆(构件2)上P点的坐标、速度及加速度。
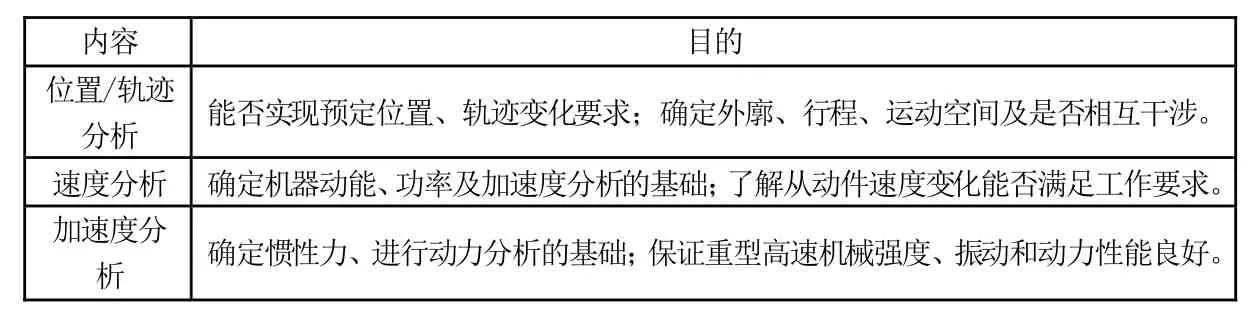
表1

图1 机构运动分析示意图
规定x轴的正向为各构件转角θ的起始线,沿逆时针为正。四杆机构的各构件用矢量表示,得到机构运动的数学模型,即矢量方程:

(一)轨迹(或位置)分析
1.构件2、3的角位移θ2和θ3
将矢量方程(1)写成直角坐标形式,得

2.连杆上P点的坐标(xP,yP)
P点的位置坐标为

这也是P点轨迹的参数方程
(二)速度分析
1.构件2、3的角速度ω2和ω3
对方程(2)求导并写成矩阵形式,得到角速度矩阵方程

2.连杆上P点的速度vP
对P点的位置方程(3)求导,得P点的速度为

(三)加速度分析
1.构件2、3的角加速度α2和α3
对速度矩阵方程(4)求导,得加速度矩阵方程

2.连杆上P点的加速度aP
对P点的速度式(5)求导,得P点的加速度为

矩阵法作机构运动分析时,建立的数学模型较为复杂,计算工作量大,但由于计算机的利用和数学工具的日臻完善,矩阵法已得到广泛应用。特别是当需要确切知道或要了解机构在整个运动循环过程中的运动特性时,或者作多杆机构运动分析时,采用矩阵法并借助计算机软件(如Matlab软件),不仅可获得很高的计算精度及一系列位置的分析结果,还能绘出机构相应的运动曲线图,提高机构的设计与分析效率。
参考文献
[1]何伟,李震,等.基于铰链四杆机构运动学的解析法及ADAMS仿真[J].巢湖学院学报,2011(6):80-84.
[2]王华杰.基于MATLAB的四杆机构运动分析与动画模拟系统[J].机械设计与制造,2005(5):139-140.
[3]胡高举,郑才刚,王勤.一种铰链四杆机构运动分析仿真算法[J].现代制造工程,2002(10):76-78.
[4]曾昭德,王政,等. LabVIEW在平面四杆机构运动分析与仿真的应用[J].现代制造工程,2005(3):112-114.
中图分类号:G642
文献标志码:A
文章编号:2096-000X(2016)03-0250-02
作者简介:余敏(1965-),女,汉族,本科,学士,海军蚌埠士官学校教员,研究方向:士官基础教
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21 09:15:02
电子制作(2018年18期)2018-11-14 01:48:24
Coco薇(2017年9期)2017-09-07 20:39:29
山东工业技术(2016年15期)2016-12-01 05:31:22
中央民族大学学报(自然科学版)(2016年3期)2016-06-27 07:55:32
南都周刊(2015年1期)2015-09-10 07:22:44
南都周刊(2015年3期)2015-09-10 07:22:44
南都周刊(2015年4期)2015-09-10 07:22:44
科普童话·百科探秘(2014年9期)2014-09-16 08:57:27
小朋友·快乐手工(2014年4期)2014-08-16 12:17:09