基于单片机的智能小车设计
2016-06-02 03:09:44邵阳学院邓喜兵许建明陈炯明
电子世界 2016年9期
邵阳学院 邓喜兵 许建明 陈炯明
基于单片机的智能小车设计
邵阳学院 邓喜兵 许建明 陈炯明
【摘要】设计一款通过单片机控制的智能小车,可以通过红外遥控切换模式在循迹和遥控控制两种模式进行工作。当工作在遥控模式时能够使用NEC协议的红外遥控控制小车行驶,在循迹模式时可以实现循迹功能。该系统有遥控和小车两大部分,遥控器采用成品遥控模块,小车控制器则采用51单片机为控制核心。循迹功能则通过红外对管来检测黑线达到寻线的功能。经过实际测试该智能小车达到了预期的要求,实现了智能小车的基本功能。
【关键词】单片机;循迹;红外遥控
1 系统工作原理
本系统分为小车部分和遥控器部分。红外遥控器的制作,可以采用51单片机进行编码和调制红外发射管所需要的信号。红外通信协议采用NEC协议,也可以采用成品红外遥控进行设计。红外遥控小车的工作原理是以51单片机为控制芯片,通过对1383集成红外接收头处理过的信号进行解码。实现识别红外遥控所发出的信号,并同时控制L9110(H桥芯片),实现对电机的控制。循迹功能的实现,采用两对红外发射、接收管和一块LM358集成运放组成的电压比较器,实现对黑线的循迹功能。该系统外围元件少简化了电路设计,提高了系统的可靠性。该系统的系统框图如图1所示。
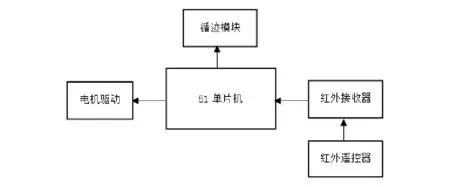
图1 系统框图
2 硬件系统设计
2.1 循迹电路设计
由于不同颜色的物体反射光线的强度是不一样的,本设计采用的是黑线作为小车循迹的路线。当红外光照射在黑色的物体上时,反射回来的光线就比较弱,因此红外光敏二极管接收到的光线就比较弱,呈现较大的电阻。当红外光照射在反光能力比较强的物体上时,红外光敏二极管接收到的光线强呈现的电阻就比较小。可以根据这一原理和电压比较器组成一个黑线循迹模块。通过单片机判断电压比较器的输出电平就能够实现循迹的功能。
2.2 红外接收电路设计
该系统采用1383红外接收头作为红外遥控器的接收器件,该接收头一共有三个引脚分别是电源、地和信号输出。该接收头的工作原理为:当接收到载波频率为38KHz的脉冲调制信号时,首先由红外接收头内的红外敏感元件将脉冲调制红外光信号转换成电信号,再由前置放大器和自动增益控制电路进行放大处理,然后通过带通滤波器进行滤波,滤波后的信号由解调电路进行解调,最后由输出电路进行反向放大并输出低电平;未接收到载波信号时,电路则输出高电平。把红外接收头的数据输出引脚接在单片机的中断接口,当有遥控信号时片机对遥控信号进行解码得到控制信号。
2.3 电机驱动电路设计
该设备采用两个直流电机,由于直流电机的正反转控制可以通过改变电机两端电压的极性来实现的,直流电机驱动采用的是H桥电路。可以采用分立原件和集成电路两种方案,由于采用集成电路外部原件少电路设计简单,本设计采用两片集成H桥驱动芯片L9110作为电机的驱动器,控制信号则由单片机产生PWM信号对电机进行调速。
2.4 整体电路原理图设计
该系统主要由单片机最小系统、红外接收头、循迹模块、电机驱动芯片构成。整体系统电路原理图如图2所示。
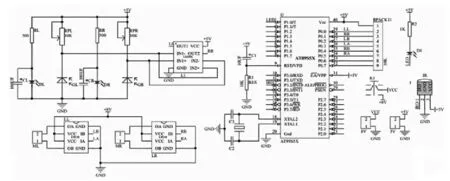
图2 系统电路原理图
3 软件设计
该系统采取模块程序设计的方案,以外部中断的方式实现红外遥控器的解码。该程序可分为中断服务程序、电机驱动程序、循迹子程序等构成。主程序通过调用各个子函数达到智能小车的功能。经实际检测程序整体的可读性较好,方便维护与移植。
4 结束语
本文设计了一款基于51单片机的智能小车。该小车采用了STC89C52RC微控制器为控制芯片,1383红外接收头,L9110 H桥电机驱动芯,LM358集成运放。该小车成本低,功能强大,娱乐性高,具有较高的实用价值。
参考文献
[1]江世明,许建明,朱群峰,申寿云.单片机原理及应用[M].上海﹕上海交通大学出版社,2013.
[2]韩克,薛迎霄.单片机应用技术[M].北京﹕电子工业出版社,2013.
[3]王东锋,王会良等.单片机C语言应用100例[M].西安﹕电子工业出版社,2009.
作者简介:
邓喜兵(1993—),男,湖南娄底人,电子科学与技术专业在读本科生。
通信作者:
许建明(1977—),男,湖南武冈人,硕士,副教授,主要从事电子技术研究。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
Chinese Physics B(2022年1期)2022-01-23 06:36:04
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2018年12期)2018-08-01 00:48:04
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2017年19期)2017-02-02 07:08:27
电子制作(2016年11期)2016-11-07 08:43:49