光纤陀螺测量卫星结构角振动的地面试验验证
2016-06-01 09:22:18边志强曾擎王皓许海玉沈毅力
航天器工程 2016年2期
边志强 曾擎 王皓 许海玉 沈毅力
(上海卫星工程研究所,上海 200190)
光纤陀螺测量卫星结构角振动的地面试验验证
边志强 曾擎 王皓 许海玉 沈毅力
(上海卫星工程研究所,上海 200190)
针对结构角振动对卫星光学载荷成像影响大,且在轨微振动实时测量较困难的问题,文章对比了国内外角振动测量方法,提出利用光纤陀螺实时测量角振动方法,利用角振动激励台对光纤陀螺测量结果进行了标定,其测量精度满足要求,并测量了动量轮组合工作模式下的卫星载荷安装板的角振动特性。地面试验结果表明:此测量方法合理可行,可为增强卫星在轨的抗振性、提高有效载荷指向精度和稳定度提供参考。
结构角振动;光纤陀螺;实时测量;振动特性
1 引言
近年来各国竞相发展对地观测卫星,高分辨率遥感卫星成为空间技术发展的一个重要方向,具有十分重要的应用价值。从20世纪70年代的100m左右分辨率,到目前已发展到1m以内。与之对应的是有效载荷对指向稳定度的要求也越来越高,对星载活动部件的运动所引起的微振动越来越敏感。微振动是航天器在轨运行期间,由飞轮或控制力矩陀螺、太阳翼驱动机构步进、推力器开关、推进剂晃动、相机摆镜摆动等部件运动造成的。只要航天器内存在运动部件,就一定存在微振动[1]。微振动幅值小、频谱宽,其加速度量级在1×10-6~1×10-2gn,对应的位移在微米量级,频率范围从0.01Hz到几千赫兹。微振动分为线振动和角振动两类。光学敏感器成像质量对角振动环境极为敏感[1],根据光学载荷的成像分析,垂直于光轴平面的线振动大于沿光轴的线振动,绕垂直于光轴平面内坐标轴的角振动大于绕光轴的角振动,角振动的影响远远大于线振动的影响[2]。
由于卫星在轨运行所受的重力环境与地面完全不同,其微振动特性与地面所测量的微振动特性有所不同,进行在轨微振动实时测量具有重要意义。本文对比国内外测量角振动的方法,提出使用光纤陀螺测量卫星角速度兼顾测量角振动的创新方法,并在地面进行了试验验证,能满足在轨实时监测角振动的频率和幅值测量精度要求。
2 卫星角振动测量一般方法
在挠性振动测量方面,国外主要采用加速度计和角位移传感器进行测量,其中,加速度计测量低频振动,角位移传感器测量中、高频振动,为图像定位提供精确姿态信息。美国地球静止环境业务卫星-N(GOES-N)应用惯性角速率传感器(MHD-ARS)提供平台高频角振动信息[3]。美国某中继卫星为测量星上跟踪和指向光学系统的角振动信息,安装了6个MHD角速率传感器,其在轨性能与地面性能一致,在轨测量频带3~1000Hz的角位移噪声功率谱有效值达到100nrad[4]。日本先进陆地观测卫星(ALOS)安装以美国ARS-12G为原型改造的MHD角位移传感器,测量高带宽指向抖动,带宽频率为2~500Hz,噪声为±0.010″(1σ)[5]。
我国神舟飞船的微振动测量仪只用于监测瞬变加速度和振动加速度,采用国产石英挠性加速度计,可测出10-6gn量级的微振动[6]。海洋二号卫星搭载了力学环境测量系统,对主动段和自由飞行段卫星关键设备进行动力学环境测量,包括主动段卫星振动响应及其结构传递,自由飞行段卫星活动部件工作引起的微振动以及传递到光学敏感器上的微振动响应等,在轨测试结果对于完善、修正卫星分析模型有重要价值,为确定卫星地面力学试验条件提供了参考依据[7]。
目前,振动测量分为线振动和角振动测量。线振动测量仪表种类较多[8],如加速度传感器、激光测振仪等。角振动较线振动测量系统在技术难度上较大,且传感器种类不多,主要有:①基于光学平台的激光测量仪表;②微振动角速度传感器。其中前者精度较高,但系统组成复杂,结构较大,不适合卫星在轨使用;后者具有体积小、质量轻、精度高等特点,但造价比较昂贵,研制难度大。一般对于频率低于10Hz的指向和角振动,航天器主要采用陀螺仪或光学敏感器测量;而对于频率高于10Hz的指向和角振动,可通过角度传感器测量,成功应用于卫星角振动高精度测量的惯性传感器主要有两类:磁流体效应角速度传感器和流体旋转差动感应角位移传感器[9]。
当前,大多是利用线振动激励源组合产生角振动,利用多个线加速度传感器组合测量角振动。这样,一方面多个线振动传感器间接解算三轴角振动必然引入多个误差源,精度受限,且解算方法复杂;另一方面,线振动间接测量角振动,传感器数量较多,安装调试不方便,若实现在轨测量角振动,重量、功耗也是要重点考虑的因素。因此,利用惯性角度传感器在轨直接测量角振动的方法有着十分重要的研究价值。
本文主要针对某型号实际工程设计微振动测量方法,其振源主要是动量轮转动过程中其动不平衡引起的振动干扰,动量轮在轨工作在800r/min~3000r/min范围,引起的角振动干扰频率是转速工作频率及其谐波频率,频谱较宽,在10~200Hz内。
光纤陀螺(FOG)具有高动态、高灵敏度、轻小型、环境适应性强等特点,不但能作为角速度测量仪表应用在飞船、卫星和导弹等控制分系统中,还可实现宽频角振动测量功能。本文针对某卫星的微小角振动环境,在不增加质量的约束下,兼顾卫星控制系统的角速度测量,提出利用高精度高带宽的光纤陀螺实现卫星局部微小角振动的测量,为增强卫星的抗振性、提高有效载荷指向精度和稳定度提供数据支撑。
3 光纤陀螺在轨测量卫星角振动
为在轨实时测量卫星角振动,考虑卫星布局、星上资源等限制因素,采取以下一系列措施确保光纤陀螺能在轨实时准确测量卫星角振动特性。
(1)光纤陀螺多用途使用:传统应用中,光纤陀螺作为角速度敏感器测量航天器本体角速度,用于航天器姿态控制。由于其动态范围大、测量精度高等优点,光纤陀螺逐步作为航天器在轨角振动测量传感器使用。在某型号卫星研制过程中,提出了使用一套光纤陀螺测量卫星姿态角速度的同时,兼顾测量卫星载荷安装底板角振动的方案。光纤陀螺仪(含陀螺光路、陀螺电路)具有较高通频带(大于100Hz),一路数据经过内部数字滤波降低带宽后(为避免飞轮等运动部件产生局部高频振动被光纤陀螺敏感到),送控制计算机用于姿态控制;另一路数据经过高频率采样,直接用于在轨测量卫星载荷安装面的角振动(见图1)。
(2)光纤陀螺星上布局:光纤陀螺用于在轨测量有效载荷安装面的角振动特性,因此尽量将光纤陀螺与有效载荷安装在同一个安装面上,并尽量放置在安装板的中心位置,考虑到光纤陀螺的漂移特性因素,进行高精度姿态确定时,须要利用星敏感器对其常值偏移进行标定,为避免光纤陀螺和星敏感器之间安装基准的相对变形,将星敏感器、有效载荷和光纤陀螺安装在一个安装板上,并尽量相互靠近(见图2)。
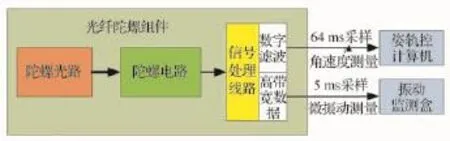
图1 光纤陀螺数据信息流程示意图Fig.1 Data information flow chart of FOG
4 地面试验验证
4.1 角振动激励台测试
为验证光纤陀螺准确测量卫星微小角振动性能,在地面利用角振动激励设备(标定后频率精度优于0.1Hz,角振动幅值相对误差小于3%)对光纤陀螺角振动测量性能进行标定,该光纤陀螺零偏稳定性优于0.01(°)/h,动态响应频带大于80Hz,采样周期2ms。3只陀螺头敏感轴正交安装,其输入轴分布在半锥角α=54°44′08″的锥面上,输入轴在水平面的投影成120°(见图3)。
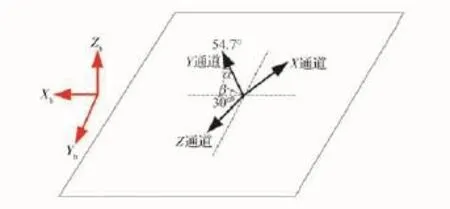
图3 光纤陀螺与角振动激励台位置关系Fig.3 FOG and angle vibration equipments position relationship
试验时,将光纤陀螺放置在角振动激励台上,Z通道光纤陀螺在安装面的投影与六自由角振动激励台的+Yb轴重合。光纤陀螺测量角振动与六自由激励台角振动的解算关系如下:
式中:φbx、θby、ψbz代表振源在3个方向的角振动幅值;Fgx、Fgy、Fgz代表光纤陀螺3个通道角度增量积分后角度,β=30°。
利用角振动激励系统施加+Zb方向振动激励,光纤陀螺3个表头同时采集角度增量数据,进而解算微振动信息。其处理过程如图4所示。
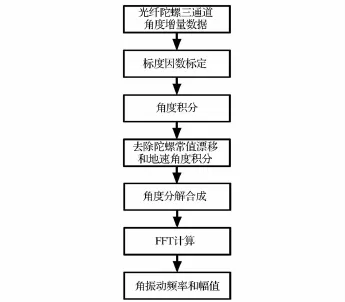
图4 数据处理流程Fig.4 Data processing process
(1)利用光纤陀螺3个通道的标度因数分别标定其输出值,获得大动态范围内的高精度数据;
(2)对光纤陀螺3个通道的角度增量进行积分,获得3个通道光纤陀螺的角度数据;
(3)去除光纤陀螺3个通道角度数据一阶趋势项,扣除陀螺常值漂移和地速的角速度积分;
(4)在(3)基础上对3个通道角度数据进行分解合成,如式(1),得到绕+Zb轴方向的角振动数据;
(5)将绕+Zb轴方向的角振动数据进行快速傅里叶变换(FFT)计算分析,获得角振动信息的频率和幅值。
以角振动输入激励为50Hz(角振动幅值0.209″)为例,光纤陀螺的测量数据处理过程,如图5~图7所示。
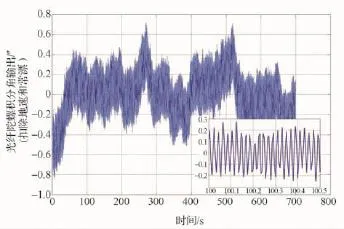
图6 扣除地速和常漂的光纤陀螺积分角(绕+Zb轴)Fig.6 Integral angle deducting earth-rate and drift values(+Zb-axis)
不同角振动激励测试情况见表1。
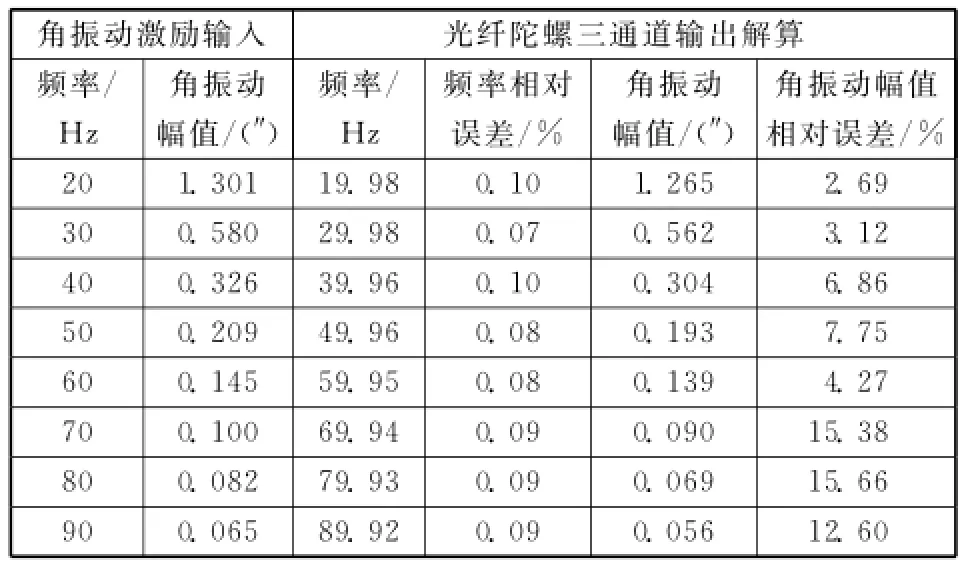
表1 光纤陀螺解算微振动信息与角振动激励比对表Table 1 Comparison between FOG calculation result and angle vibration excitation
由表1可知:
(1)频率解算误差,光纤陀螺测量数据计算的频率信息与角振动激励系统的输入基本一致,频率误差在0.1%以内。
(2)振动幅值解算误差,由于测量误差和安装角α误差等导致振动幅值的解算误差。低频段20~60Hz内,振动幅值解算误差在7%以内;受陀螺带宽的约束,70~90Hz频段范围内振动幅值解算误差在15%左右(主要是高频信号衰减造成)。
4.2 动量轮组合工况测试
某卫星安装6个动量轮,在地面整星环境下,将光纤陀螺安装在有效载荷安装底面上,设置1#~6#动量轮保持在不同工作转速下,采集光纤陀螺的2ms输出数据。通过分析光纤陀螺的测试数据,可得到卫星结构体微小角振动的特性,整理数据后得到图8和表2。
测试结果表明:
(1)1#~6#动量轮同时工作时,由光纤陀螺采样数据计算得到的动量轮工作转速频率都能被测到,并且频率解算误差小于0.1%,卫星本体+X轴方向上角振动最大为0.215″,+Y方向上角振动最大为0.284″,+Z方向上角振动最大为0.155″。同时,由于飞轮的动不平衡、轴承摩擦等因素,光纤陀螺测量数据中存在其他干扰信号(95.42Hz、101.7Hz以及低频信号等)。
(2)动量轮组合工作时,输出数据有组合谐振频率点,且频率与飞轮转动频率一致。同时,光纤陀螺可以准确测量卫星结构的微小角振动的振幅,并据此可以准确识别卫星结构的角振动特性。

图8 地面整星动量轮工作时,光纤陀螺的角振动测量信息Fig.8 Measured results of angle vibration in momentum wheel working

表2 动量轮组合工作时光纤陀螺数据的频率和振幅Table 2 Frequency and amplitude of FOG in momentum wheel working
5 结束语
本文从某卫星单机配置、转动部件特性以及载荷实际情况出发,利用光纤陀螺高带宽高精度特点,提出了卫星姿态角速度和微振动兼顾测量的方法,对有效载荷安装板的微振动特性进行测量。地面试验结果表明:光纤陀螺对卫星动量轮转动引起的振动干扰能够精确测量,其角振动测量数据可用于在轨卫星有效载荷高带宽、高精度指向控制,以及图像的动态补偿等其它场合。
(
)
[1]Kantsiper B L,Ray J C,Hunt J W,et al.Autonomous avoidance of structural resonances on the STEREO mission[C]//Proceedings ofthe AIAA Guidance,Navigation and Control Conference and Exhibit.Washington D.C.:AIAA,2007:6549
[2]赵鹏.振动对航空相机成像质量影响的分析[J].激光与红外,2001,31(4):240-242 Zhao Peng.The vibration analysis of optical instrument in flying platform[J].Laser &Infrared,2001,31(4):240-242(in Chinese)
[3]E Hayes.A method for selecting satellite constellationsto minimize revisit time[C]//AIAA 26th Aerospace Sciences Meeting.Washington D.C.:AIAA,1988
[4]S R Oleson,R M Myers.Launch vehicle and power level impacts on electric GEO insertion,AIAA1996-2978[C]//32ndAIAA/ASME/SAE/ASEE Joint Propulsion Conference.Washington D.C.:AIAA,1996
[5]Takanori Iwata.Precision geolocation determination and pointing management for the Advanced Land Observing Satellite(ALOS)[C]//IEEE International Geoscience and Remote Sensing Symposium 2003.New York:IEEE,2003
[6]薛大同,雷军刚,程玉峰,等.“神舟”号飞船的微重力测量[J].物理,2004,33(5):15-19 Xue Datong,Lei Jungang,Cheng Yufeng,et al.Microgravity measurement of spaceships“Shenzhou”[J].Physics,2004,33(5):15-19(in Chinese)
[7]赵煜,周东强.“海洋二号”卫星主动段、自由飞行段力学环境测量与分析[J].航天器环境工程,2012,29(4):458-466 Zhao Yu,Zhou Dongqiang.In-situ measurement and analysis of mechanical environment on HY-2satellite[J].Spacecraft Environment Engineering,2012,29(4):458-466(in Chinese)
[8]李宁,韩晓健,李俊慧.航天器微振动信号的地面测试方法[J].航天器环境工程,2011,28(1):67-71 Li Ning,Han Xiaojian,Li Junhui.Ground testing method for spacecraft micro-vibration signals[J].Spacecraft Environment Engineering,2011,28(1):67-71(in Chinese)
[9]霍红庆,马勉军.卫星微角颤振高精度测量技术[J].传感器与微系统,2011,30(3):4-9 Huo Hongqing,Ma Mianjun.High precision measurement technology of satellite’s angle microvibration[J].Transducer and Microsystem Technologies,2011,30(3):4-9(in Chinese)
(编辑:李多)
FOG Measures Satellite Structure Angle Vibration Method
BIAN Zhiqiang ZENG Qing WANG Hao XU Haiyu SHEN Yili
(Shanghai Institute of Satellite Engineering,Shanghai 200190,China)
In view of the problem that optical payload’s image quality is heavily influenced by angular vibration of structure and the vibration is hard to be real-time measured on-orbit,this paper contrast some domestic and international methods for angular vibration measurement,and proposes a real-time measure method for angular vibration by using FOG.The measurement result of FOG is calibrated by angular vibration excitation-table,and the results show that its measurement accuracy satisfies the requirement.Angular vibration characteristics of the satellite payload mounting surface are also measured in a momentum wheel combinational working mode.The result of ground tests show that the measure method is reasonable and it can provide a reference for enhancing satellite on-orbit anti-vibration and advancing payload pointing accuracy and stability.
angular vibration of structure;optic fiber gyroscope(FOG);real-time measurement;vibration performance
V416
A
10.3969/j.issn.1673-8748.2016.02.018
2015-02-06;
2015-06-15
边志强,男,高级工程师,从事卫星总体和姿轨控研究。Email:bianzhiqiang2003@163.com。
猜你喜欢
高中数理化(2024年8期)2024-04-24 05:21:33
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27 02:30:46
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20 13:23:44
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
电子制作(2017年7期)2017-06-05 09:36:13
电测与仪表(2016年15期)2016-04-12 00:30:52
电源技术(2015年5期)2015-08-22 11:18:30