
Nonlinear adaptive switching controlfor a class ofnon-af fine nonlinear systems☆
2016-05-30 01:54:48MiaoHuangXinWangZhenleiWang
Miao Huang ,Xin Wang ,ZhenleiWang *
1 Key Laboratory of Advanced Controland Optimization for ChemicalProcesses,East China University ofScience and Technology,Shanghai200237,China
2 SchoolofOptical-Electricaland Computer Engineering,University ofShanghaifor Science and Technology,Shanghai200093,China
3 Center ofElectrical&Electronic Technology,ShanghaiJiao Tong University,Shanghai200240,China
1.Introduction
Nonlinear discrete-time dynamic systems can be described as a socalled Nonlinear Auto-Regressive and Moving Average(NARMA)Model[1–3]which is represented as a sum of its linearized components and the higher order nonlinear components.Using this representation,many of the methods thatdealwith linearsystems[4]can also be applied to solve problems in the nonlineardomain.Such as treating the nonlinear parts as disturbances in controller design,linear robust adaptive control methodscan be utilized in identi fication and controlofnonlinearsystems.
Froma practicalaspect,nonlinear controlis often needed when better performance(more accurate tracking,larger domain of operation,quick response etc.)is pursued after the plant is operated with a linear controller.The main motivation for developing neuralnetwork adaptive controlalgorithms[5–10]is their capability to approximate a large class ofcontinuous nonlinear maps from the collective action ofautonomous processing units thatare connected in simple ways[6].However,due to the complexity of the structure of a multi-layer NN and the nonlinear dependence of its map on the parameter values,stability analysis of the resulting adaptive systems has always been very dif ficult and quite often intractable[11].
The adaptive supervisory controlarchitecture provides a potential method to incorporate different controlapproaches to achieve stability and improve performance.This architecture consists of two main components[12,13]:(1)a multi-controller formed by a family ofcandidate controllers designed off-line to meet the controlobjectives based on different possible sets ofvalues of the plant parameters;and(2)a supervisor responsible for deciding which controller or combination ofcontrollers is to be switched-on based on the on-line measured input/output(I/O)plantdata.One recent approach is the so-called supervisory control[14–16],in which the controller selection is made by continuously comparing in realtime suitably de fined performance signals and the candidate controller associated with the smallest performance signalis used to controlthe lineardynamic system.The supervisory controlforthe nonlinear systems with Input–output-to-state Stability(IOSS)and the linear time-varying systems is studied[17–20].This method is also developed forcertain classes ofnonlinearsystem[21–24].Following the idea oforiginalsupervisory controlfor linear systems[14,15],an adaptive controlreferred to as “multiple modelswitching and tuning(MMST)”is proposed[25–28]for linear systems.Different from the supervisory control,an adaptive system is initiated with the best modelparameters at the same values in parameter space[29],but is adjusted adaptively.These,in turn,are used to controlthe system.The MMST method later is extended to a parametric strict-feedback systemby resetting the parameterestimator of adaptive back-stepping control[30].Also another logic based switching method is the so-called unfalsi fied controlapproach[31–33].The unfalsi fied controlapproach is a modelfree approach and different from most other switching schemes.It relies on measured data to select the rightcontroller.The methods mentioned above are allproposed for linear systems or continuous nonlinear systems,while the discrete-time nonlinear systems are rarely considered in the previous literatures.
Nonlinearadaptive switching controlmethod using neuralnetworks and multiple models[2,11]is proposed for a class ofdiscrete-time nonaf fine nonlinear systems described by the NARMA form.This method is the following from the MMST approach[25–28].This method provides a convenientframework forincorporating differentcontrolapproaches to obtain both stability and improved performance of the nonlinear system simultaneously.By making some assumptions concerning the nonlinear plant to be controlled,a linear modeland a NN based nonlinear modelare used to identify the system.Based on their performance as identi fiers,a corresponding(linear or NN based nonlinear)adaptive controller is used at every instant to controlthe system.By a judicious combination of the two approaches and the choice of a suitable switching law,both stability and performance are achieved.However,this scheme suffers from a drawback that the higher order nonlinear term of the nonlinear plant is restricted to be global boundedness.This largely con fines the type of the controller systems[34].
This paper focuses on designing the nonlinear adaptive switching controlin order to remove or relax the global boundedness assumption of the higher order nonlinear term,which has been partly investigated[34–36].By introducing difference operator into the modelof the linear adaptive controller,this assumption can be turned into the globalboundedness on the difference of the higher order nonlinear term[35].A recent result[34]uses a linear indirect self-tuning controller with modi fied Clarke index instead of the direct adaptive controller[11]so that the assumption is relaxed to linear bounded.Unfortunately,a new restriction that the partialderivative of the nonlinear term with respect to the control input is a positive constant is added,which limits the application of the controller.To remove this condition,an indirectlinear adaptive controller which utilizes a modi fied robust identi fication algorithm with normalization is incorporated by Huang and Wang[36].
Motivated by the above discussion,this paper presents an improved nonlinear adaptive control approach which uses similar framework[2,11]for a class ofdiscrete-time nonlinear systems described by the NARMA form.However,the globalboundedness assumption of the higher order nonlinear term or its difference term is not required.In this method,an incrementalmodelis employed to describe the nonlinear systems and an improved robustadaptive law is put forward for the linear adaptive controller.Based on the identi fication errors of the linear and nonlinear models,a new switching criterion is designed to select the proper controller.All the signals in the proposed control system have been proved bounded.Simulation results are presented to demonstrate the effectiveness of the proposed controllaw.
The paper is organized as follows:Problem description and the incrementalmodelare presented in Section 2.The controller design procedure is proposed in Section 3.Section 4 analyzes the bounded-input bounded-output(BIBO)stability of the overallsystemwhen the system switches between the linear and nonlinear controllers.Section 5 shows the simulation results obtained from the application of the proposed controller.Finally,the conclusions are presented in Section 6.
2.Problem Description
The SISO nonlinear discretized system dynamics considered in this paper are expressed as a NARMA scheme

where y(k)and u(k)are the output and input signals,d represents the time delay,ai,i=1,… ,na-1 and bj,j=0,… ,nb-1 are the unknown parameters,naand nbare the orders of the system and b0≥bmin>0 and bminis a known smallpositive constant which is the lower bound of b0.This system can be regarded as a pure nonlinear system,where the linear partcorresponds to the firstorder Taylorapproximation and g(X(k))corresponds to the rest ofsuch approximation.g(X(k))with the properties g(0)=0,∂g∂X|X=0=0 is a higherordernonlinearfunction,where X(k)=[y(k+d-1),…,y(k+d-na+1),u(k),…,u(k-nb+1)]T.
Remark 1.Since the controlinput term u(k)appears nonlinearly in g(X(k)),the system Eq.(1)is a non-af fine nonlinear system.
Assumption.The following property of Eq.(1)is assumed:
A1.The upper bound of na,nband the time delay d are known and 1≤nb≤na-1;
Eq.(1)can be rewritten as the form

where q-1is the back-shift operator,i.e.q-1y(k)=y(k-1),
Introducing a de finition ofhigh order differentialoperator[34]Δ=1-q-dand multiply Eq.(2)by the operatorΔ,Eq.(2)willbe transformed into Eq.(3).

whereΔg(X(k))=g(X(k))-g(X(k-d)).
SinceΔA(q-1)and q-dare coprime,using the polynomialΔA(q-1),two polynomials F(q-1)and G(q-1)can be uniquely determined by the Diophantine equation.

where F(q-1)is monic polynomialand the degree of F(q-1)is d.The degree of G(q-1)is na.
Both sides of Eq.(3)are multiplied by F(q-1)simultaneously.

Using Eq.(4),Eq.(5)can be rewritten as
Then an incrementalmodelfor parametersθis given by

where H(q-1)=F(q-1)B(q-1)and its degree is nh=nb+d-1,Δζ(k)=F(q-1)Δg(X(k)), ψ(k)=[y(k),…,y(k-na+1),Δu(k),…,Δu(k-nh+1)]T, θ =[g0,g1,…,gna-1,h0,h1,…,hnh-1]T, gi,i=0,… ,na-1 and hj,j=0,… ,nh-1 are the coef ficients of polynomials G(q-1)and H(q-1),respectively.This equation is able to dealwith the situation wherein a controllaw has to be determined at time k,when the outputs y(k+1),…,y(k+d-1)are not available.
Assumption.The following properties are assumed for Eq.(8).
A2.The system Eq.(8)has globally uniformly asymptotically stable zero dynamics so that an input difference sequence{Δu(k)}never grows faster than the output sequence{y(k)}[11].
A3.θ∈Ω,for some known compactconvex set asΩ⊂Rna+nh.
A4.|Δζ(k)|2≤μ+μ‖ψ(k)‖2,
whereΔζ(k)=F(q-1)Δg(X(k))andμ>0 is a known constant.
Remark 2.The assumption A2 is the equivalentof the well-known condition that the system is minimum phase[11].
Remark 3.The difference ofhigher order nonlinear function of Eq.(3)Δg(X(k))is assumed to be global bounded,i.e.|Δg(X(k))|≤M,where M≥0 is known[35].However,in this paper,from assumption A4,the nonlinear difference term of Eq.(3)Δg(X(k))can be unbounded.The nonlinear system which satis fies assumption A4 butnot satis fies the assumption of[35]is shown in Example 1 of Section 5.It is obvious that assumption A4 is relatively mild.
A bounded signal yr(k)represents the desired output of the system Eq.(8),and the value yr(k+d)is known to the controller at time k.The objective of the proposed adaptive control method is to generate a bounded control signal u(k)such that the output y(k)of the system Eq.(8)asymptotically approaches the speci fied bounded signal yr(k)and all signals in the control systems are bounded.
3.Nonlinear Adaptive Switching Controller Using Linear and Nonlinear Models
In this section,a new nonlinear adaptive switching control approach is designed to control the discrete-time nonlinear system Eq.(8).The structure of the proposed control system is illustrated in Fig.1.
Let M1and M2be two models which predict the output of the plant in linear and nonlinear fashion,respectively,with their parameters updated using the inputand outputdata of the system.Let J1and J2be the performance criterions suitably de fined.Atevery instant k,the adaptive controller Ciformed by Miwith a smaller Ji,i=1 or 2,willbe chosen to generate the controlinput u(k)to the plant.
This control framework was initially proposed by Chen and Narendra[11],while improvements are made in this paper to deal with the milder assumption A4:the parameters of M1is updated by a robust adaptive law with parameter projection and dynamic signal normalization instead of the adaptive law with dead-zone used in[11,35].A new performance criterion is designed for the switching mechanism.These improvements willbe described in more details below.
Remark 4.The adaptive law used to update the parameters of the linear model is a gradient law with dead-zone which depends on the known bound of the nonlinear difference term of Eq.(3)Δg(X(k))[35].However,in this paper,the difference of the nonlinear term Δg(X(k))may be unbounded or the bound is unknown,and thus the adaptive law used[35]cannotbe used in this case.The performance criterion[35]is designed based on the properties of the adaptive law and must be also improved.

Fig.1.Structure of the nonlinear adaptive switching controlsystems.
3.1.Linear robust adaptive controller C1
The linear estimation model M1of Eq.(8)is de fined as

whereis the output of Model M1,is an estimate of θ,is short for g1,i(k),i=0,…,na-1,andis short for h1,j(k),j=0,…,nh-1 andis updated in two steps.In the first step,the parametersare updated by a gradientlaw with parameter projection and dynamic signal normalization.In the second step,if the value of the componentis less than bmin,it is set to bmin.
In the firststep,the robust adaptive law is

whereare shortfor)andrespectively,0≤Γ1<2;0≤δ0<1;ε1is the normalized estimation error andΔu(k)=u(k)-u(k-d).From assumption A3,the norm ofθis no more than some positive constant N0,i.e.|θ|≤N0.
The convergence of the adaptive law Eqs.(10)–(14)is proved in Lemma 1.
Lemma 1.The robust adaptive law Eqs.(10)-(14)has the following properties:

Proof.De fineFrom Eqs.(10),(11)and(12),itobtained


where
De finingand using Eqs.(15)and(16),the following equation can be obtained:

Then θ1(k)|≤N0,we have g(k)=0 and for
Letus examine the term g(k),which is due to projection.For|>N0,we have

Sinceit follows that

Fromwe haveand from Eq.(20),we get

Therefore,at every instant k.Hence
Substituting1),we obtain
From assumption A4,i.e.|Δζ(k)|2≤μ+μ‖ψ(k)‖2,we obtain

where
Sinceit follows that

Using inequality(24),we have
where
Since the projection guarantees thatwe can establish thatand,from the expression ofΔV(k)above,thatε1(k+d)ms(k)∈S(μ2).Using these properties,we can also establish thatwhere S(μ2)denotes:

In the second step,if

Note that or,|V+(k)|2≤|V(k)|2.Then,is set up toand let=b min.Therefore the conclusions of Lemma 1 stillhold.
The controlinput u1(k)is designed using the certainty equivalence principle to achieve^y1(k+d)=yr(k+d).Then u1(k)can be computed by

where

3.2.Neuralnetwork based nonlinear adaptive controller C2
The NNbased nonlinearestimation model M2ofEq.(8)is de fined as:

whereis the output of Model M2,is an estimation ofθandis a bounded continuous nonlinear function parameterized by a vector W(k)(e.g.,a neural network with “weights”vector W).No restriction is made on how the parametersor W(k)are updated exceptthat)always lies inside some pre-de fined compactregion ς:

and in this regionς,is always greater than bmin.
Remark 5.Since no restriction is made on the update method of the parametersthe identi fication problem of the linear part of the nonlinear systems can be considered by ignoring the nonlinear part of the systems.The weights of the neural network can be adjusted along the negative gradientof the mean square error of the nonlinear model by a single step BP algorithm.However,the boundedness of the estimation error of Model M2is uncertain because the approximate performance of the NN is affected by the different structures and training methods.
The normalized estimation error of Eq.(28)is de fined as

The controllaw of Controller C2is given by

where
3.3.Performance criterion and switching rule
In this section,the switching mechanism between the linear adaptive controller and the NN based nonlinear adaptive controller is developed.This switching mechanism comprises a performance criterion and a switching rule.
Letbe the identi fication error of Model Miat time k+d.Combining the normalization estimation errors Eqs.(12)and(30)the identi fication errors of linear and nonlinear models,a performance criterion is de fined as

where Γ0>0 and C0≥0 are the prede fined weighting coef ficients of the normalization error and the identi fication error,respectively.N≥1 is a positive integer such that ei(k-N+1)represents the identi fication error of model Miat the k-N+1 instant.J1and J2are the measures of the identi fication performance of models M1and M2.
By comparing the values of J1(k)and J2(k),the adaptive controller Cicorresponding to the model Miwith a smaller Ji(k)is chosen to generate the controlinput u(k)to the plant.Then,the controller switching rule can be written as:

3.4.Algorithm procedure
The procedure of the propose controlmethod is shown in Table 1.
Table 1 Algorithm procedure
4.Stability Results
In this section,the BIBO stability of the proposed adaptive switching controlsystem is deduced.Lemma 2 is introduced first,which demonstrates the stability when only the linear adaptive controller is used.
Lemma 2.Consider the linear adaptive controller Eq.(27),with identi fier Eqs.(9)-(14),applied to Eq.(8).Then,allthe signals in the adaptive control system are bounded.
Proof.The normalized estimation error Eq.(12)and linear controller Eq.(27)can be rewritten as
We substitute(k)ψ(k)in Eq.(34)by Eq.(35)to obtain

For some δ>δ0,taking l2δ-norms on the both sides of Eq.(37),it follows that


Any positive nonzero constant whose value does not affect stability is denoted with the same symbol c.Since yr(k+d)is a bounded reference signal,from inequality(38),we have

By assumption A2 and inequality(39),it follows that

Therefore,from Eqs.(39)–(41),we can established

For some δ > δ0,the fictitious signalis de fined.Since δ > δ0,the inequalitycan be veri fied.Besides using inequality(42),for arbitrary k≥0 we obtain:

Using the discrete time Bellman–Gronwalllemma[37],it follows from inequality(43)that

Using the fact that the geometric mean is less than the arithmetic mean,we have


Employing the result of Lemma 1 thatε1(k+d)ms(k)∈l∞,we obtain which implies that mf∈ l∞.From the de finition of mf(k)and choosing a bounded initialvalue u(0)for the input signal u(k),we can establish the boundedness of allsignals,i.e.ψ(k),y(k+d),u(k)∈l∞and
Theorem 1.For system Eq.(8)with identi fiers Eqs.(9)and(28)together with their adaption laws Eqs.(10)-(14)and(29),controllers Eqs.(27)and(31),and a switching mechanism Eqs.(32)-(34),all the signals in the adaptive switching system are bounded.And the tracking error of the system is e(k+d)∈S(μ2).
Proof.From the properties of the linear robust adaptive controller given in Lemma 1 and Lemma 2,J1(k)is bounded.By the use ofcertainty equivalence,atevery instant k,either e(k+d)=y(k+d)-yr(k+d)=y(k+d)-^y1(k+d)=e1(k+d)or e(k+d)=e2(k+d)can be obtained,where e(k+d)≜y(k+d)-yr(k+d)is the tracking error.Letε(k+d)be the normalization error of
There can be two cases of J2(k):
(1)When J2(k)is unbounded,a time instant k0exists so that J2(k)>J1(k)when k≥k0.Based on the switching rule of Eqs.(32)–(34),σ(k)=1 and controller u1(k)will be used at time k+1,∀k≥k0.Thus

From Eq.(42),it follows that

The rest of the proof follows along the same lines as in the single modelcase in Lemma 2.Therefore

Since ε1(k+d)ms(k)∈S(μ2)and ms(k)are bounded from the results of Lemma 1 and Lemma 2,we have e(k+d)∈S(μ2).
(2)J2(k)is bounded.Thus,its components ε2(k+d)and ε2(k+d)ms2(k)are bounded.In this situation,switching signalσ(k-1)described in Eq.(33)can also be divided in two cases:σ(k-1)=1 andσ(k-1)=2.
Whenσ(k-1)=1,the controller C1with controllaw Eq.(27)will be used attime k,i.e.u(k)=u1(k).Then,{ψ(k)},{y(k+d)},and{u(k)}are bounded and e(k+d)= ε1(k+d)ms2(k)∈ S(μ2)can be obtained from the results of Lemma 1 and Lemma 2.
Whenσ(k-1)=2,from Eq.(30)and controllaw Eq.(31),we have

From assumption A2,it follows that

Thus signals{y(k+d)}and{Δu(k)}are bounded,since ε2(k+d)and ε2(k+d)ms2(k)are bounded.
Choosing a bounded initialvalue u(0)ofsignal u(k),we have
Add the both sides of the inequalities(53)–(55),we have‖u(k)‖2δ+ … +‖u(k-d+1)‖2δ≤ c.So,{u(k)}is bounded.In this case

Because J1(k)is composed ofε1(k)∈S(μ2)andε1(k)ms2(k)∈S(μ2),it follows that e(k+d)∈S(μ2).
From the above analysis we can see that all the signals in the switching system are bounded and the tracking error satis fies e(k+d)∈S(μ2).
5.Numerical Simulation
In order to discuss the details of the method clearly,two straightforward applications are presented.The firstshows thatthe proposed controller can deal with a nonlinear discrete numerical system which satis fies assumptions A1–A4 but not satis fies the assumption of[35].The other example is a simulation for a practicalsystem to illustrate the effectiveness of the proposed controlmethod.
5.1.Example 1
Consider the following nonlinear discrete-time system:

where ψ=[y(k),y(k-1),Δu(k),Δu(k-1)]Tand Δζ(k)=0.1 sin(ψ(k)Tsatisfy assumption A4,i.e.
A reference trajectory is y∗(k)=1.5(sin2πk/10+sin 2πk/25),which is shown in dashed lines in Figs.2–4.
In the start of the simulation,a linear robust adaptive controller is used to controlthe plant alone and its performance is shown in Fig.2.Allthe signals in the adaptive controlsystem are bounded.However,the oscillation amplitude does not decrease with time since the linear controller lacks the capacity to compensate for the nonlinearity.In this interval,the input and output data of the system is collected and is used to train the neuralnetwork by BP algorithm with adaptive learning rate in batch mode.
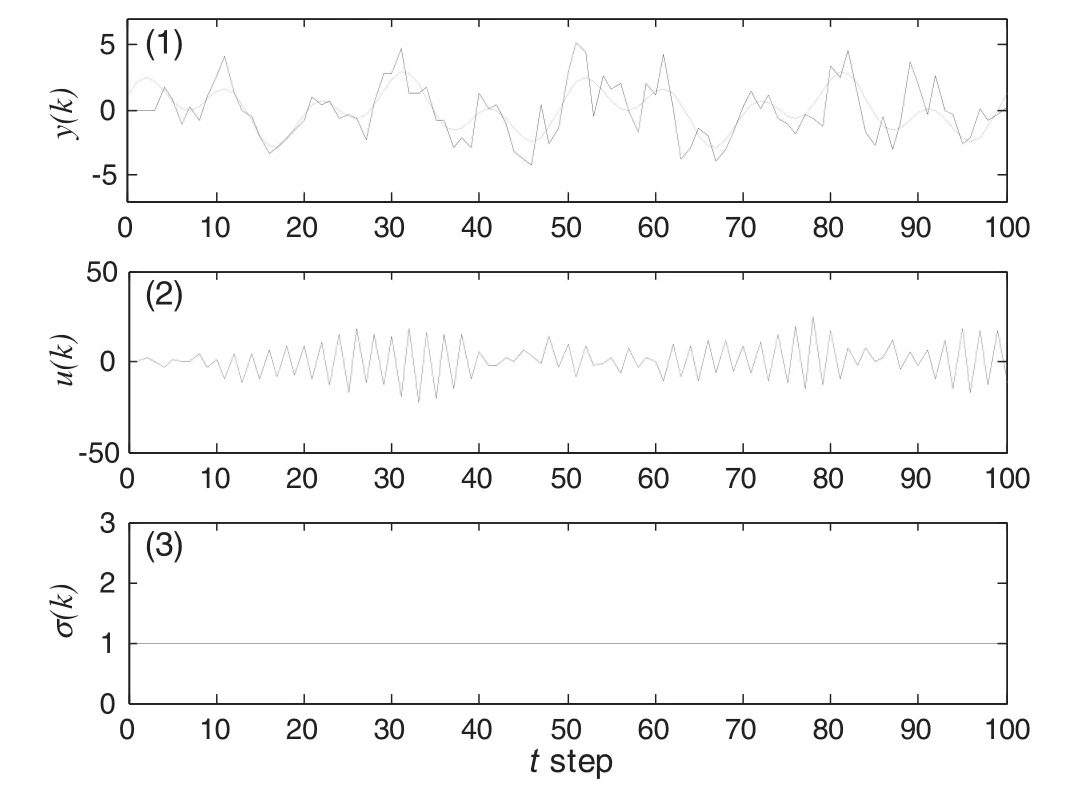
Fig.2.Performance of the linear controller:(1)output(solid)and reference(dashed);(2)controlinput;(3)dummy “switching”signal.
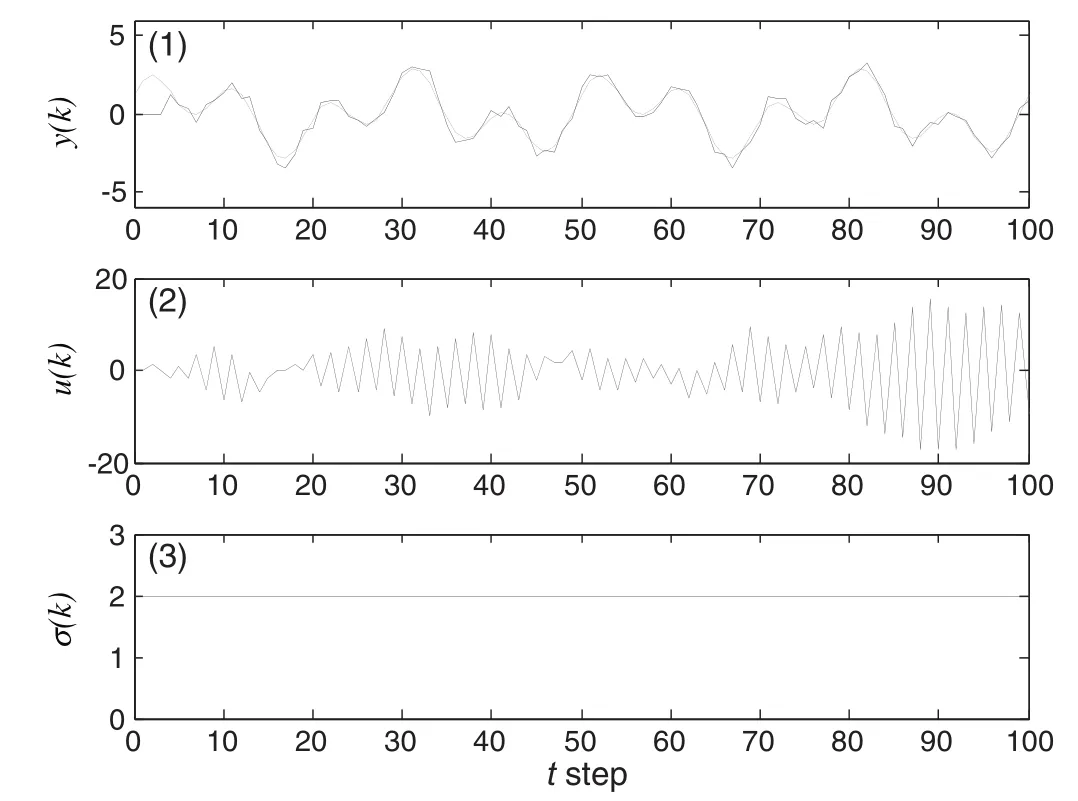
Fig.3.Performance of the nonlinear controller:(1)output(solid)and reference(dashed);(2)controlinput;(3)dummy “switching”signal.
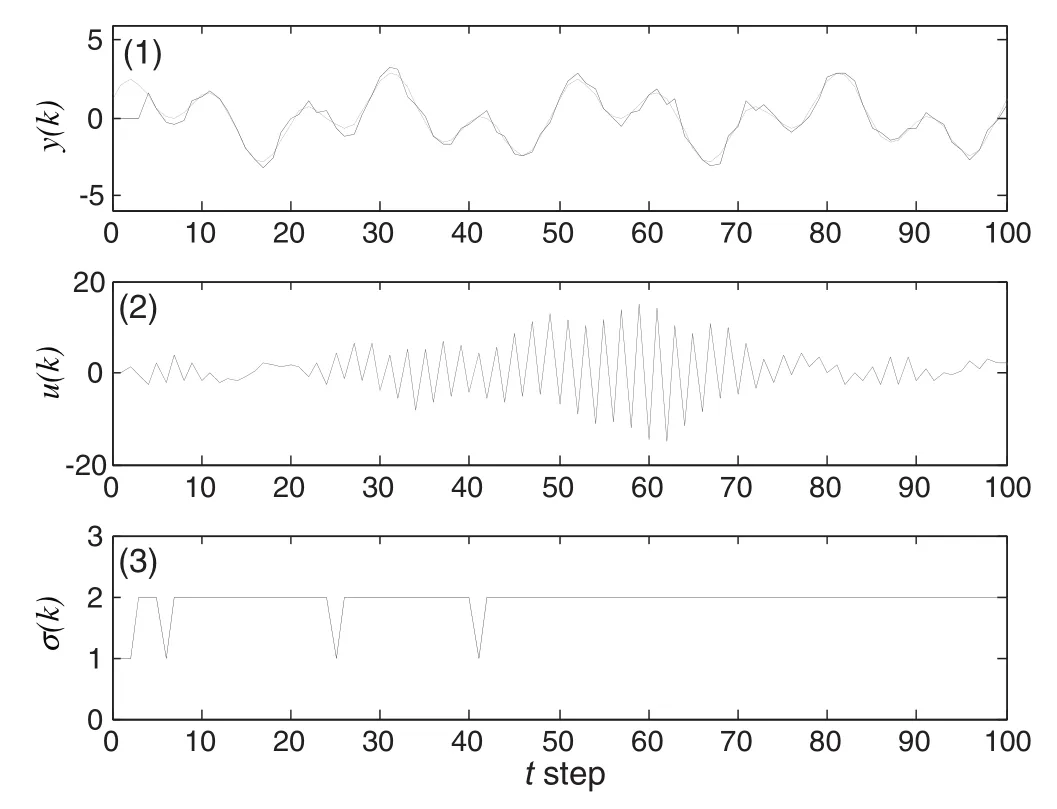
Fig.4.Performance of the proposed controller:(1)output(solid)and reference(dashed);(2)controlinput;(3)switching sequence:1 denotes linear,2 denotes nonlinear.
Then,a nonlinear adaptive controller based on the neural network mentioned above is used to control the system Eq.(57),which has a standard feed-forward NN with single layer and 8 nodes.The nonlinear model with this neural network is used online as an identi fier and its weights are adjusted along the negative gradientofsome well-de fined performance index.Fig.3 shows the performance of the nonlinear adaptive controller which has a good NN based nonlinear identi fier.
The plant is controlled using the controlscheme proposed in this paper and the performance is showed in Fig.4.Two identi fiers Eqs.(9)and(28)with their adaption laws Eqs.(10)–(14)and(29)are used to estimate the output signalof the consider system and the corresponding controllers Eqs.(27)and(31)are used to controlthe system.The same initialparameters for the two identi fiers with^θ1(0)=^θ2(0)=[2,-0.7,0.7,0.7]Tand the same NN with the NN based nonlinear adaptive controller mentioned above are set.The other parameters are set as Γ0=0.1,Γ1=0.2,N0=50,δ0=0.5,C0=0.5,and N=2.In the simulation,the choice of the parametersΓ0,C0and N is to reduce the poortransientresponse caused by frequentswitching.Itcan avoid oscillation as much as possible,and meanwhile,make the system switch rationally between the two controllers.These parameters are relatively high sensitive and need design.N0is determined by the parameter space of the unknown parameters of the plant.In the thesis,the Γ1,δ0are determined to improve the identi fication speed and accuracy,and have low sensitivity.
In this case,the switching controller shows a quick response during the tracking process and does not exhibit a persistentoscillation during the steady-state.The performance of the proposed controller is better than that of the linear controller and the nonlinear controller shown in Figs.2 and 3,respectively.From Fig.4,the NN based nonlinear controller works very wellatmostof the time.Butthe nonlinear modeldegrades for some reason occasionally and the linear controller has to take over until the nonlinear controller recovers.Allthe signals in the system are always bounded and good transient performance is achieved simultaneously.
5.2.Example 2
Consider the levelcontrolproblem of fluid in the classicalspherical tank system.This is a common problem associated with storage tanks,and blending and reaction vessels.The spherical tank system is described[38].It is essentially a system with nonlinear dynamics and can be described by the first-order differentialequation:

where R is the radius of the sphericaltank and the nonlinear differential equation above is described as the change ofwater level y caused by the difference between the in flow Qiand the out flow Q0.L represents the time delay due to the pipeline feeding the water from a reservoir into the sphericaltank.The out flow of the tank is dependent on the water levelin line with the Bernoulliequation:

In this simulation,the following parameters are selected as R=1,cd=1,α=1,y0=0.1,L=0.02 and d=2.
In this paper,itwillbe assumed thatthese parameters are unknown.The following equation is used to represent the plant:

The proposed controller can be applied with the initial parameter vectorsand c=0.9.An NN with single hidden layer and 12 hidden nodes is chosen and the back-propagation algorithm with adaptive learning rate in batch mode is used.
Simulation resultsare shown in Figs.5–7.The outputand the control input signals are both bounded,and a good performance is achieved.
6.Conclusions
A nonlinear adaptive switching controlmethod has been developed for a class ofdiscrete-time nonlinear non-af fine systems.The proposed controller can remove the globalboundedness constrainton the nonlinear term of the systemby introducing an incrementalmodeland an improved robust adaptive law.Mathematical analysis shows that this controlalgorithm can ensure the globalstability of the considered system.Simulation results are presented to demonstrate that allinvolved signals of the controlsystem are bounded and the tracking performance is improved simultaneously.
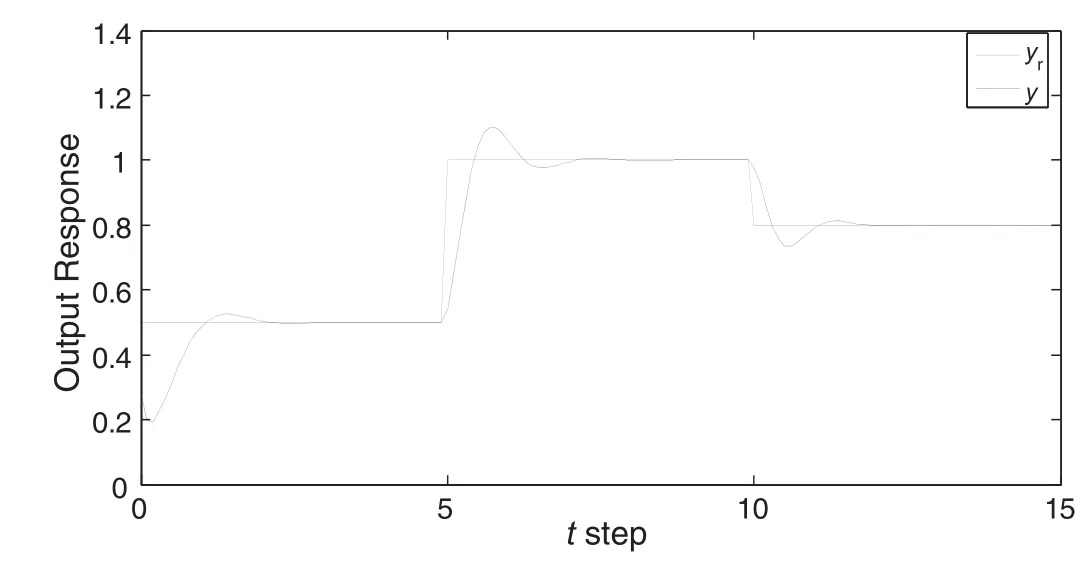
Fig.5.Response of the sphericaltank system.

Fig.6.Controlinput of the sphericaltank system.

Fig.7.Switching sequence of the proposed controller.
[1]J.B.D.Cabrera,K.S.Narendra,Issues in the application ofneuralnetworks for tracking based on inverse control,IEEE Trans.Autom.Control44(1999)2007–2027.
[2]L.Chen,N.KumpatiS,Identi fication and controlofa nonlinear discrete-time system based on its linearization:A uni fied framework,IEEE Trans.NeuralNetw.15(2004)663–673.
[3]J.R.Noriega,H.Wang,A direct adaptive neural-network controlfor unknown nonlinear systems and its application,IEEE Trans.NeuralNetw.9(1998)27–34.
[4]G.C.Goodwin,K.S.Sin,Adaptive filtering prediction and control,Prentice-Hall,New Jersey,1984.
[5]D.Wang,Neuralnetwork-based adaptive dynamic surface controlofuncertain nonlinear pure-feedback systems,Int.J.Robust Nonlinear Control21(2011)527–541.
[6]T.Hayakawa,W.A.Haddad,N.Hovakimyan,Neuralnetwork adaptive control for a class of nonlinear uncertain dynamicalsystems with asymptotic stability guarantees,IEEE Trans.Neural Netw.19(2008)80–89.
[7]T.Zhang,S.S.Ge,Adaptive neuralnetwork tracking controlof MIMO nonlinear systems with unknown dead zones and controldirections,IEEE Trans.NeuralNetw.20(2009)483–497.
[8]D.Vrabie,F.Lewis,Neuralnetwork approach to continuous-time direct adaptive optimal control for partially unknown nonlinear systems,Neural Netw.22(2009)237–246.
[9]T.Sun,H.Pei,Y.Pan,C.Zhang,Robust adaptive neuralnetwork controlfor environmental boundary tracking by mobile robots,Int.J.Robust Nonlinear Control 23(2013)123–136.
[10]M.Chen,S.S.Ge,B.Voon Ee How,Robust adaptive neuralnetwork controlfor a class of uncertain MIMO nonlinear systems with input nonlinearities,IEEE Trans.Neural Netw.21(2010)796–812.
[11]L.Chen,K.S.Narendra,Nonlinear adaptive controlusing neuralnetworks and multiple models,Automatica 37(2001)1245–1255.
[12]S.Baldi,G.Battistelli,E.Mosca,P.Tesi,Multi-modelunfalsi fied adaptive switching supervisory control,Automatica 46(2010)249–259.
[13]S.Baldi,P.Ioannou,E.Mosca,Multiple modeladaptive mixing control:The discretetime case,IEEE Trans.Autom.Control57(2012-10-23)1040–1045.
[14]E.W.Bai,S.S.Sastry,Global stability proofs for continuous-time indirect adaptive controlschemes,IEEE Trans.Autom.Control32(1987)537–543.
[15]P.D.Larminat,On the stabilizability condition in indirect adaptive control,Automatica 20(1984)793–795.
[16]H.Zargarzadeh,S.Jagannathan,J.Drallmeier,Robust optimal control of uncertain nonaf fine MIMO nonlinear discrete-time systems with application to HCCIengines,Int.J.Adapt Control Signal Process.26(2012)592–613.
[17]J.P.Hespanha,D.Liberzon,A.S.Morse,Supervision ofintegral-input-to-state stabilizing controllers,Automatica 38(2002)1327–1335.
[18]L.Vu,D.Chatterjee,D.Liberzon,Input-to-state stability of switched systems and switching adaptive control,Automatica 43(2007)639–646.
[19]L.Vu,D.Liberzon,Supervisory controlofuncertain linear time-varying systems,IEEE Trans.Autom.Control56(2011)27–42.
[20]D.Liberzon,Finite data-rate feedback stabilization of switched and hybrid linear systems,Automatica 50(2014)409–420.
[21]A.Cezayirli,M.K.Ciliz,Transient performance enhancement of direct adaptive controlof nonlinear systems using multiple models and switching,IET Control Theory Appl.1(2007)1711–1725.
[22]A.Cezayirli,M.Kemal Ciliz,Indirect adaptive control of non-linear systems using multiple identi fication models and switching,Int.J.Control.81(2008)1434–1450.
[23]M.K.Ciliz,A.Cezayirli,Increased transient performance for the adaptive controlof feedback linearizable systems using multiple models,Int.J.Control.79(2006)1205–1215.
[24]J.H.Ahrens,H.K.Khalil,High-gain observers in the presence ofmeasurement noise:A switched-gain approach,Automatica 45(2009)936–943.
[25]K.S.Narendra,J.Balakrishnan,M.K.Ciliz,Adaptation and learning using multiple models,switching,and tuning,IEEE Control.Syst.Mag.15(1995)37–51.
[26]K.S.Narendra,J.Balakrishnan,Adaptive controlusing multiple models,IEEE Trans.Autom.Control42(1997)171–187.
[27]K.S.Narendra,X.Cheng,Adaptive controlof discrete-time systems using multiple models,IEEE Trans.Autom.Control45(2000)1669–1686.
[28]K.S.Narendra,O.A.Driollet,M.Feiler,K.George,Adaptive control using multiple models,switching and tuning,Int.J.Adapt ControlSignalProcess.17(2003)87–102.
[29]A.S.Morse,Supervisory controloffamilies oflinear set-pointcontrollers part I.Exact matching,IEEE Trans.Autom.Control41(1996)1413–1431.
[30]J.Kalkkuhl,T.A.Johansen,J.Ludemann,Improved transient performance of nonlinear adaptive backstepping using estimator resetting based on multiple models,IEEE Trans.Autom.Control47(2002)136–140.
[31]R.Wang,A.Paul,M.Stefanovic,M.G.Safonov,Cost detectability and stability of adaptive controlsystems,Int.J.Robust Nonlinear Control17(2007)549–561.
[32]M.Stefanovic,M.G.Safonov,Safe adaptive switching control:Stability and convergence,IEEE Trans.Autom.Control53(2008)2012–2021.
[33]G.Battistelli,J.P.Hespanha,E.Mosca,P.Tesi,Model-free adaptive switching control of time-varying plants,IEEE Trans.Autom.Control58(2013)1208–1220.
[34]Y.Fu,T.Chai,Indirect self-tuning controlusing multiple models for non-af fine nonlinear systems,Int.J.Control.84(2011)1031–1040.
[35]Y.Fu,T.Chai,Nonlinear multivariable adaptive controlusing multiple models and neuralnetworks,Automatica 43(2007)1101–1110.
[36]M.Huang,X.Wang,Z.Wang,Multiple modeladaptive control for a class of linearbounded nonlinear systems,IEEE Trans.Autom.Control60(2015)271–276.
[37]C.A.Desoer,M.Vidyasagar,Feedback systems:input–output properties,vol.55,SIAM,2009.
[38]K.K.Tan,S.Huang,R.Ferdous,Robust self-tuning PID controller for nonlinear systems,J.Process Control12(2002)753–761.
 Chinese Journal of Chemical Engineering2016年9期
Chinese Journal of Chemical Engineering2016年9期
- Chinese Journal of Chemical Engineering的其它文章
- In situ synthesis ofhydrophobic magnesium hydroxide nanoparticles in a novelimpinging stream-rotating packed bed reactor☆
- Enhancing the hydration reactivity ofhemi-hydrate phosphogypsum through a morphology-controlled preparation technology☆
- Synthesis and characterization ofcopolymers ofpoly(m-xylylene adipamide)and poly(ethylene terephthalate)oligomers by melt copolycondensation
- Improvement of CO2 capture performance ofcalcium-based absorbent modi fied with palygorskite☆
- Adsorption behavior ofcarbon dioxide and methane in bituminous coal:A molecular simulation study☆
- Characterization of the adsorption behavior ofaqueous cadmium on nanozero-valent iron based on orthogonalexperiment and surface complexation modeling☆