
单OSV服务多卫星的转移轨道优化研究
2016-05-23 09:35:50刘庆国刘新学
飞行力学 2016年2期
刘庆国, 刘新学
(火箭军工程大学 906教研室, 陕西 西安 710025)
单OSV服务多卫星的转移轨道优化研究
刘庆国, 刘新学
(火箭军工程大学 906教研室, 陕西 西安 710025)
摘要:利用混合法解决了有限推力作用下单OSV服务多卫星的转移轨道优化问题。首先从OSV携带燃料的角度出发,初步筛选出在其服务范围内的服务对象,基于双脉冲交会假设,确定了服务序列以及时间节点;其次针对每一段转移轨道,利用Pontryagin极小值原理推导出最优控制律,设定开-关-开的发动机工作方式,将初始协态变量和开关机时间进行参数化处理,采用遗传算法对非线性规划问题进行求解;最后对整条轨道进行拼接优化。仿真结果表明,混合法对协态变量初值猜测敏感性小,降低了搜索最优转移轨道的难度,且控制轨线光滑。
关键词:服务序列; 有限推力; 混合法; 轨道优化
0引言
航天器在轨服务是指在空间通过人、机器人或两者协同完成涉及延长各种航天器寿命、提升执行任务能力的一类空间操作[1]。在轨服务航天器(On-Orbit Service Vehicle,OSV)主要任务包括在轨装配、在轨维护和后勤支持[2]。相对 “单对单”的服务方式来说,单个OSV服务多卫星的“单对多”服务方式能够有效降低费效比,同时省去地面准备、发射入轨的时间,响应速度更快。文献[3]对单个OSV的服务范围进行了定量分析,其推力模型为单脉冲。文献[4-5]分别就OSV“单对多”和“多对多”的任务分配问题进行了研究,但其轨道优化模型均为脉冲条件下“单对单”的问题。现有关于OSV在轨服务的轨道优化模型大多为“单对单”的服务方式,推力模型为脉冲推力,而对于有限推力作用下OSV“单对多”转移轨道优化的研究相对较少。
由于直接解决有限推力作用下“单对多”的转移轨道问题优化变量较多,所以本文分两步求解此问题。首先确定服务序列,从OSV携带能量的角度出发,初步筛选出服务对象,根据双脉冲交会假设进行全局优化搜索,确定了服务序列以及时间节点,为有限推力作用下的转移轨道优化提供初值;其次进行转移轨道优化,基于混合法建立了有限推力作用下的轨道优化模型,对整条轨道进行拼接优化;最后对提出的单OSV服务多卫星的转移轨道优化模型进行了仿真计算。
1确定服务序列
有限推力作用下直接对转移轨道进行优化的计算十分复杂。为简化计算,首先对服务对象进行筛选,缩小可行解的范围;然后基于双脉冲交会假设,以速度增量作为性能指标,进行全局优化搜索,确定脉冲作用下的服务序列以及时间节点,为有限推力作用下转移轨道的优化提供初值。
1.1筛选服务对象
OSV对于服务对象的筛选主要是从两方面考虑:一是服务对象的任务优先级别,在OSV进行服务之前,应选择任务优先级别较高的部分卫星作为预选服务对象;二是考虑OSV的服务范围,由于OSV携带的燃料是有限的,单个OSV很难实现对所有目标的在轨服务,所以要确定OSV的服务范围,对于服务范围之外的预选服务对象应予排除。
本文对OSV服务范围的确定是一个比较简略的全局优化,其目的在于排除不可行解,缩小可行解的范围,减少后续在确定服务序列的计算量。在忽略各种摄动力的前提下,从轨道能量的角度出发,确定OSV的服务范围,即能够实现轨道交会的范围。OSV的机械能[6]为:

(1)
式中:m为OSV的质量;μ为引力常数;a为轨道半长轴。假设OSV的燃料所能转化的机械能用Efu表示,其自身机械能用E1,燃料的质量为mfu,则OSV能进行服务的卫星轨道半长轴应满足以下关系:
(2)
通过以上两步,即可初步筛选出服务对象。
1.2基于遗传算法的服务序列确定
(3)
其约束条件为:
(4)
式中:i=1,2,…,n;t1,t3,…,t2n-1为转移时刻;t2,t4,…,t2n为交会时刻;Tmax为OSV与服务对象运行周期的最小公倍数;tserve为OSV与服务对象交会后的服务时间;Fmax为OSV推力最大值;g0为重力加速度;Isp为发动机比冲;ω为衡量脉冲转换为有限推力的难度系数;n为子段数目;ΔVi为第i段轨道的速度增量;ΔVmax为最大速度增量;Δmi为第i段转移轨道所消耗的燃料质量,计算如下:
(5)
式中:mi为第i段轨道的起始时刻质量。
利用遗传算法对转移时刻和交会时刻进行全局优化搜索,进而通过求解二体Lambert问题[7]得到双脉冲交会的速度增量。图1给出了双脉冲交会示意图。

图1 双脉冲交会示意图Fig.1 Schematic diagram of double-pulse rendezvous hypothesis
遗传算法的实现步骤如下:
(1)对转移时刻和交会时刻t0,t1,t2,…,t2n-2进行编码,随机产生50个染色体作为初始种群,设置交叉概率为Pc,变异概率为Pm,最大迭代次数为N。
(2)给出适应度函数:
计算种群个体的适应度值及群体的适应度值总和。
(3)利用RWS方法进行选择,然后进行交叉、变异,生成新一代种群。
(4)重复执行(2)和 (3),直到算法收敛或者达到最大迭代次数。
2转移轨道优化
转移轨道的优化包括两方面:一是每一段轨道的优化,由1.2节得到的结果可以将每一段轨道转化为两端状态固定的最优控制问题,进而采用混合法对转移轨道进行优化;二是整条轨道的优化,本文采用拼接优化的方法进行处理。
2.1动力学模型
本文使用地心赤道惯性坐标系下的二体模型:
(6)
式中:r,v分别为位置矢量和速度矢量;F为发动机推力;α=[αx,αy,αz]T为推力方向的单位矢量。
2.2基于混合法的转移轨道优化模型
以燃料最优作为其性能指标:
(7)
式中:t0,tf分别为每一段轨道的起始时刻和终端时刻。
根据Pontryagin极小值原理[8],引入Hamiltonian函数:
(8)
式中:λr,λv为状态量的协态变量;λm为质量m的协态变量。
最优推力方向矢量α*应使Hamiltonian函数最小,利用∂H/∂α=0以及约束‖α‖=1,从而得到最优推力方向为:
(9)
对协态变量求偏导数,得到协态变量满足的微分方程如下:
(10)
OSV的初始边界条件为:
(11)
终端边界约束为:
(12)
对于有限推力作用下的最优控制为开关形式(bang-bang控制)的发动机策略。Hamiltonian函数对推力F求偏导可得开关函数S(t),以及推力状态F(t):
(13)
(14)
本文采用的发动机开关策略为开-关-开发动机工作序列,并猜测相应的开关机时间。在得到上述方程以后,混合法将轨道优化问题转化为针对参数β的优化问题,β将包括协态变量初值,以及开机时刻ton和关机时刻toff:
(15)
式中:λ1(t01),λ2(t02)分别为每一段轨道中两个推力段的初始协态变量。
非线性规划问题具体表述如下:
目标函数为:
(16)
约束条件由式(6)、式(9)~式(12)构成,待优化变量为式(15)。
此非线性规划问题的待优化变量有16个,计算维度高,运算量大,难以用一般的启发式算法解决。遗传算法对于初值不敏感,全局搜索能力强,适合解决此类问题。在利用遗传算法时,将参数β将作为其设计向量进行编码,其适应度函数为:
(17)
其具体的算法流程上文已经提到,这里不再赘述。
2.3 拼接优化
以上是针对每一段转移轨道的优化,对于整条轨道来说,可以采用拼接的方式将转移轨道连接起来,进而得到全局最优解:
(18)
3仿真计算及分析
3.1仿真条件
本文给定OSV以及9颗卫星(S1~S9)的轨道参数如表1所示。以表1中的数据作为0时刻轨道参数,要求在8 h内完成对其中三颗卫星的在轨维修服务,对每颗卫星的在轨服务时间不小于0.5 h。
其余参数如下:Isp=2 000 s,Fmax=400 N,OSV的质量为1 000 kg,携带燃料100 kg,脉冲最大值Δvmax=0.8 km/s,发动机热能转换为机械能的效率为0.8,每千克燃料产生的热能为7.5×106J,脉冲转换为有限推力的难度系数ω=0.8,重力加速度g0=9.8 m/s2。

表1 卫星轨道参数
3.2仿真结果及分析
根据式(2)可以求出OSV能够进行服务的最大轨道半长轴为8 894.943 km,得到预选服务对象为(S1,S2,S4,S5,S7,S8)。采用遗传算法求解基于双脉冲交会假设的最优服务序列及时间节点如表2所示,总速度增量为2.461 km/s。从表2中可以看出,OSV以双脉冲交会进行轨道转移,耗时7.17 h完成了对S1,S4和S7的在轨服务,满足任务中的时间要求。

表2 服务序列及时间节点
在此基础上求解有限推力作用下的推力大小和方向随时间的变化,如图2~图8所示。

图2 推力变化曲线Fig.2 Curve of thrust variation
从图2中可以看出:OSV的发动机工作6段,每段工作时间分别为3.4 s,8.6 s,12 s,6.8 s,6.6 s,16.1 s,总工作时间为53.5 s;消耗燃料只占OSV携带燃料的1.09%,OSV能够节省更多的燃料进行轨道保持或者对服务卫星实施燃料补充。
图3~图8为OSV发动机进行工作的6段时间内最优推力方向矢量的变化曲线。

图3 第1段最优推力方向矢量Fig.3 The 1st vector of optimal thrust direction

图4 第2段最优推力方向矢量Fig.4 The 2nd vector of optimal thrust direction

图5 第3段最优推力方向矢量Fig.5 The 3rd vector of optimal thrust direction

图6 第4段最优推力方向矢量Fig.6 The 4th vector of optimal thrust direction
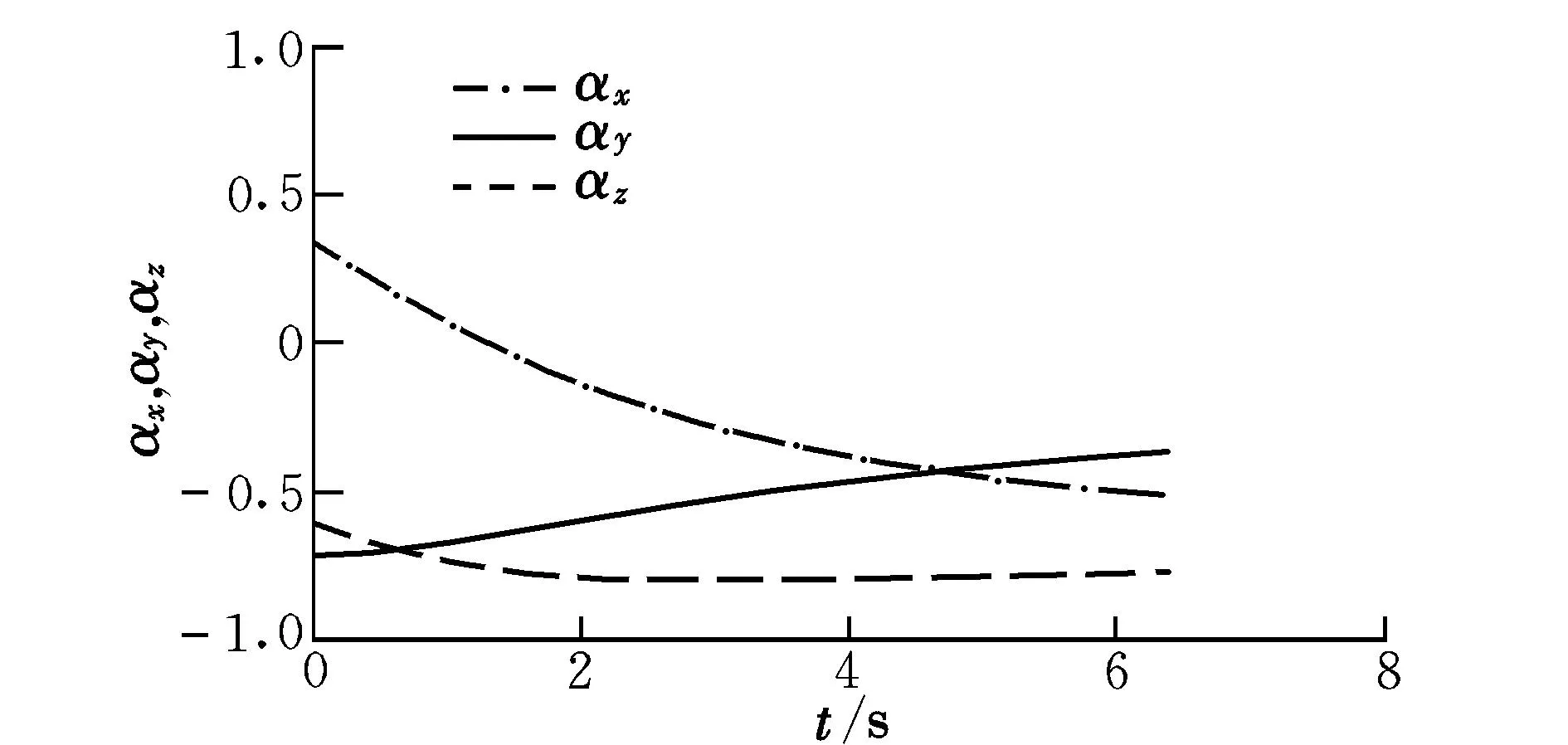
图7 第5段最优推力方向矢量Fig.7 The 5th vector of optimal thrust direction

图8 第6段最优推力方向矢量Fig.8 The 6th vector of optimal thrust direction
图9为OSV从第一次转移时刻2 907.868 s到转移结束时刻24 011.085 s的三维轨迹。
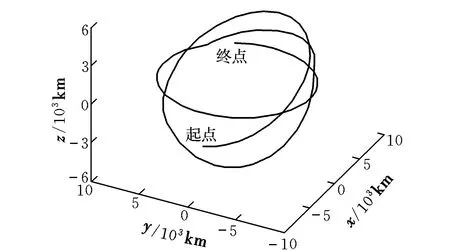
图9 OSV的转移轨道Fig.9 The transfer orbit of OSV
从上述结果可以看出,本文提出的方法对优化OSV服务多卫星的转移轨道是有效的,得到的控制轨线也比较光滑。
4结束语
本文首先确定服务顺序以及相应的时间节点,然后利用转移轨道的共轭状态来描述控制变量,设定开-关-开的发动机工作方式,舍弃了间接法中的横截条件,扩大了优化问题的收敛半径,解决了有限推力作用下单OSV服务多卫星的转移轨道优化问题,进一步丰富了OSV转移轨道优化的理论。本文采用遗传算法求解高维的非线性规划问题,由于具备大范围搜索特性的优化算法很多,所以在选取计算精度更高、收敛速度更快的优化算法方面仍然值得进一步研究。
参考文献:
[1]Waltz D.On-orbit servicing of space systems[M].Florida:Krieger Publishing Company,1993:6.
[2]陈小前,袁建平,姚雯,等.航天器在轨服务技术[M].北京:中国宇航出版社,2009:3.
[3]李岩,蔡远文,同江.在轨服务飞行器服务范围的定量分析[J].哈尔滨工程大学学报,2011,32(6):773-779.
[4]梁彦刚,王伟林.在轨服务飞行器任务指派问题[J].国防科技大学学报,2013,35(5):26-29.
[5]张琪新,孙富春,许斌,等.基于离散粒子群算法的多飞行器在轨服务任务分配[J].中国空间科学技术,2012 (2):68-75.
[6]俞辉,李俊峰,宝音贺西.多颗小行星探测序列确定及轨迹优化[J].清华大学学报(自然科学版),2007,47(11):2052-2055.
[7]赵瑞安.空间武器轨道设计[M].北京:中国宇航出版社,2008:155-181.
[8]程国采.航天飞行器最优控制理论与方法[M].北京:国防工业出版社,1999:55-58.
(编辑:崔立峰)
Optimization research on transfer trajectory of single OSV serving multi satellites
LIU Qing-guo, LIU Xin-xue
(Faculty 906, Rocket Force Engineering University, Xi’an 710025, China)
Abstract:This paper presents the method of optimizing the finite-thrust transfer trajectory of OSV serving multi satellites with the hybrid method. Firstly, the objects served were preliminarily selected within the service range according to the fuel taken by OSV, and based on the double pulse rendezvous hypothesis, the service sequence and time nodes were determined. Secondly, for each segment of the whole transfer trajectory, the optimal control law was derived by Pontryagin’s minimum principle, the engine operating mode was set to be on-off-on, the initial values of adjoint variables and the switching time were parameterized, and nonlinear programming was solved by genetic algorithm. Finally, the whole trajectory was optimized by mosaic method. The results of simulation show that the initial values guess sensitivity of adjoint variables is low by hybrid method, which reduces the difficulty of searching optimal transfer trajectory, and the control steering is smooth.
Key words:service sequence; finite thrust; hybrid method; trajectory optimization
中图分类号:V412.4
文献标识码:A
文章编号:1002-0853(2016)02-0059-05
作者简介:刘庆国(1991-),男,山东泗水人,硕士研究生,研究方向为导弹弹道与火力运用。
收稿日期:2015-05-26;
修订日期:2015-08-31; 网络出版时间:2015-09-23 16:25
