
基于PID参数自整定的液位控制系统设计及其实现
2016-05-14 02:06常建东虎恩典赵文贤张东
现代电子技术 2016年5期
关键词:液位
常建东 虎恩典 赵文贤 张东


摘 要: 针对现有液位调控系统中双回路PID参数调节困难的问题,通过将继电反馈作为支撑PID参数自整定方法,设计了一套基于MCGS和PLC的液位调控系统用串级PID参数自整定控制策略。通过分析储油罐阶跃响应得到传递函数,在此基础上对控制对象进行离散化并建立了PID参数自整定控制系统,在MCGS平台成功实验了实时监控。比较自整定前后的控制性能,得到PID参数自整定具有较快的响应速度,较小的超调量、更快达到稳态、更强的抗干扰能力等优点,可以实现对储油罐系统液位的最佳控制。仿真结果表明PID参数自整定控制技术能够有效地调节储油罐系统的液位控制,极大地保证输油系统的安全。
关键词: 液位; 串级控制; PID参数; 自整定
中图分类号: TN876?34; TP273 文献标识码: A 文章编号: 1004?373X(2016)05?0152?03
0 引 言
在工业实际生产中,液位是过程控制系统的重要被控量,在石油﹑化工﹑水处理等行业广泛应用[1?3]。通过液位的检测来控制容器中的原料的数量,以便调节容器内物料的平衡,保证生产过程中各环节的物料搭配得当[4?5]。目前液位的控制多采用人工整定PID控制策略,其存在操作繁琐、整定结果误差较大,难以适应运行环境的变化等缺陷[6],严重的情况下会造成生产事故,所以设计一个良好的液位控制系统在工业生产中有着重要的实际意义。
关于液位的控制系统设计许多学者开展了这方面的工作。林屹设计了一种模糊自校正PID控制器,并成功应用在双容水箱液位控制问题上[7]。李晓理采用多模型控制思想设计控制律设计了水箱液位的跟踪模型,避免液位达到上限[8]。丁芳在常规PID控制算法的基础上, 根据专家以及工作者的经验,设计以一种智能PID 的液位控制方法[9]。赵丹丹采用PLC为主控制器,变频器为执行器,MCGS监控软件为人机交互界面,设计了一套液位在线自调整控制系统[5]。
本文对某单位现在液位控制系统改进的基础上,将PID串级控制与上、下线控制PLC、可视化平台MCGS进行结合,设计了串级PID参数自整定液位控制系统,并通过工程实例研究串级控制系统在提高控制质量方面的效果。
1 液位串级PID控制系统方案设计
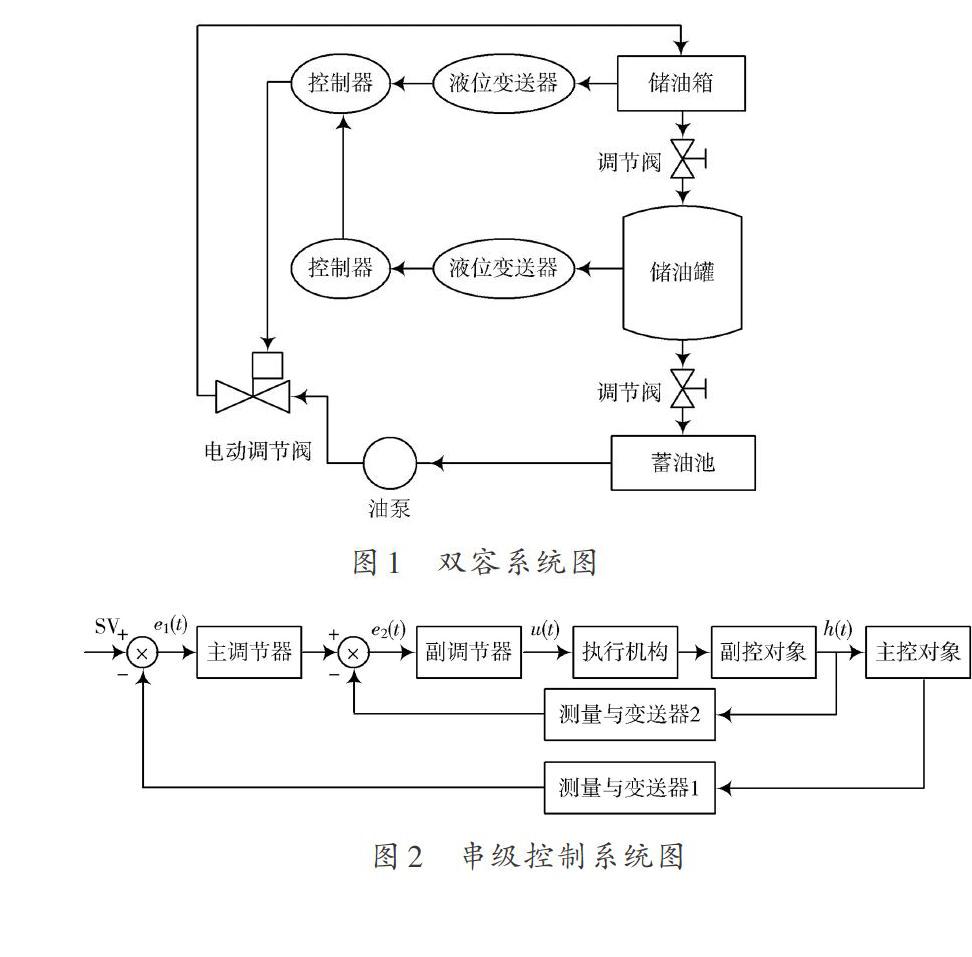
为了提高原系统储油罐的液位控制精度,增设一个储油箱,双容控制系统方案见图1。通过压力传感器对容器的液位物理信号进行采集,并转换为微弱的电信号,再经变送器放大作用转化为标准的电压信号,最后经A/D转换送入PLC中,数据在PLC中经过一些算法处理后,输出4~20 mA的电流信号驱动相应的电磁阀,达到液位控制的目的。
液位串级控制系统如图2所示,控制储油罐液位是系统设计的核心问题,所以选择主控对象为储油罐,副控对象为储油箱。设计目的是提高主参数的控制质量,因此,副调节器按单回路系统方法整定后,将副回路作为主回路的一个环节,按单回路控制系统的整定方法,整定主调节器的参数。
2.2 调节器控制规律及自整定方法的选择
系统对两个回路的要求有所不同。主回路要求精度高,主调节器的控制规律选取PI或PID控制规律,对储油罐液位进行调节;副回路要求控制的快速性,可以有余差,选取P控制规律,从而对储油箱液位进行调节。
由于继电反馈的自整定法避免了Z?N法整定时间长、临界稳定等问题,且保留其简单性,目前已成为PID自动整定方法中应用最多的一种;因此设计中采用继电反馈的自动整定法,利用这种方法先求出临界控制系数[Ku,]再用Z?N公式计算PID参数。根据实例要求,选择副控采样时间0.4 s,主控采样时间0.1 s。继电幅值的选取依据自整定方框图(如图4所示),经非线性系统描述函数法理论计算和多次仿真选择合适的继电特性幅值,进而得到合适的主控PID参数,进行自整定。
2.3 自整定实现过程及编程
(1) 根据自整定原理及方法,对自整定过程编写流程如图5所示。采用西门子编程软件STEP 7?Micro/WIN以梯形图语言形式进行程序编写,程序总体上分为手动整定和自整定两部分。在结构上主要由主程序、子程序组成,主程序主要实现诊断、PID参数设定,子程序调用、报警等功能。子程序分为手动程序和自动程序两部分。手动程序主要实现参数初始化、模拟量输入输出和PID整定功能;在手动程序的基础上,自动程序主要还实现了参数初始化、系统等幅振荡的产生、等幅振荡曲线周期和幅值的测量、控制算法和被控对象程序。
(2) 在编程过程中,如何使系统产生等幅振荡和精确的求取等幅振荡幅值、周期是编程的难点,通过反复的实验仿真和验证,并在实际系统上运行,运行结果表明系统运行效果良好,自动程序流程如图6所示。
针对等幅振荡的周期和幅值的测量和计算,幅值可以从系统响应曲线直接测量。而周期[Tu]的测量,由于采样周期等因素的影响对系统响应曲线周期的测量存在误差,所以不直接测量系统响应曲线的周期,而是采用测量输出曲线的周期使测量结果更加准确。
3 仿真结果分析
经过Matlab中的Simulink工具仿真最终选择主控、副控PID参数见表1。整定前后系统响应曲线如图7所示。其中:曲线1为手动整定系统基本稳定后响应曲线;曲线2~4分别表示三种整定方式整定后响应曲线。
由图7可知:曲线1,3知自整定后响应曲线稳定后基本没有波动,系统对液位的控制更精确,系统达到稳态的时间更短,响应加快。曲线2~4对应的继电特性幅值分别为15 mm,30 mm,60 mm。曲线2对应的继电幅值偏大导致系统超调量比较大,系统振荡加剧;曲线4对应的继电幅值偏小,系统达到稳态时间延长,且系统有余差;曲线3由于继电特性幅值选择合理,能够较合理的满足系统要求。显然,PID参数自整定具有较快的响应速度,较小的超调量、更快达到稳态、更强的抗干扰能力等优点,可以实现对储油罐系统液位的最佳控制。
4 MCGS监控平台实验
通过MCGS组态软件在控制计算机上构建一个人机交互界面,见图8,实现对液位进行监控及显示﹑PI/PID控制器界面设计﹑数据浏览﹑实时曲线及历史曲线的监测、手动/自动整定控制操作和给定值及继电特性幅值输入设置等。
当设定值设置好,系统将进入运行状态,实现两级串级控制,在右边设置了直观的实时趋势曲线,显示检测值和设定值的状态,可以分别实现对12 h,6 h,1 h,30 min,15 min,5 min,1 min的时间段的曲线显示。图11可见随着时间的变化,下水箱液位稳定在5 m。验证了PID参数自整定应用在液位控制上的合理性,能够够提高液位的控制精度,满足生产要求。
5 结 语
本系统采用MCGS组态软件作为人机交互界面,通过PLC实现控制策略,实现了串级控制系统的自动化。
针对双回路PID自整定在面板上难以实现的问题,通过编程实现了双回路PID自整定,对软件开发有重要意义。经过反复的实验发现,通过调节继电幅值可以使PID自整定结果更加理想。改进后的系统已在实际现场成功运行,运行结果表明,系统运行良好,系统稳定性、准确性明显提高,生产效率也得到提高。
参考文献
[1] 周妮娜.基于双模糊控制器的水箱液位控制[J]. 现代电子技术,2011,34(6):140?141.
[2] 乔茂伟,韦永斌.基于PSO的神经网络PID在液位控制中的应用[J].自动化与仪表,2012(9):43?47.
[3] 周荣强,罗真.双容水箱液位DMC?PID串级控制仿真研究[J].自动化仪表,2011(10):63?65.
[4] 常静,房泽平,杨益.基于虚拟仪器和PCI?6014的液位过程控制[J].仪表技术与传感器,2013(9):65?67.
[5] 赵丹丹,邹志云,于蒙,等.基于PLC和变频器的液位控制系统设计与实现[J].计算机与应用化学,2013(8):895?898.
[6] 吴兴纯,杨燕云,吴瑞武,等.基于模糊PID控制算法的自动浇注系统设计[J].铸造技术,2011(12):1654?1657.
[7] 林屹,叶小岭.模糊自校正PID液位串级控制系统设计与仿真[J].实验室研究与探索,2010(3):17?20.
[8] 李晓理,石陇辉,丁大伟.水箱液位系统多模型控制方法[J].控制理论与应用,2011(3):370?374.
[9] 丁芳,李艳芳,费玉龙.智能PID算法在液位控制系统中的应用[J].微计算机信息,2006(16):103?105.
猜你喜欢
机床与液压(2022年12期)2022-09-15
石油工业技术监督(2022年7期)2022-08-18
选煤技术(2021年3期)2021-10-13
装备制造技术(2019年12期)2019-12-25
测控技术(2018年12期)2018-11-25
测控技术(2018年9期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
电子测试(2017年11期)2017-12-15
设备管理与维修(2016年5期)2016-03-16
汽车维护与修理(2015年2期)2015-02-28
