
基于人车连杆模型的自行车骑行状态分析*
2016-05-09 09:48吴上生陆振威
华南理工大学学报(自然科学版) 2016年2期
吴上生 陆振威
(华南理工大学 机械与汽车工程学院, 广东 广州 510640)
基于人车连杆模型的自行车骑行状态分析*
吴上生陆振威
(华南理工大学 机械与汽车工程学院, 广东 广州 510640)
摘要:结合人体下肢生理特点和骑车运动特点建立了人车一体的连杆模型,并根据人体实际测量数据和经验公式获得模型参数;分析了骑行过程中的联动杠杆效应、骑行效率、骑行死点和死区现象;分别根据拉格朗日法和牛顿-欧拉法建立了人车模型的运动学和动力学方程,从而得到自行车运动等效曲柄转矩的转换过程以及各关节的受力和运动情况,为自行车骑行过程研究和设计工作提供理论基础.
关键词:人车连杆模型;骑行;运动学;动力学;转矩;关节;新型自行车
近几十年来,越来越多发达国家已出台了促进自行车行业发展的政策[1- 2].作为自行车生产与出口量最大的中国,中国内地品牌自行车均价约三百元,但市场份额却不足30%;而诸如 Giant(捷安特)、Shimano(禧玛诺)、BMW(宝马)、Merida(美利达)等数十家外资品牌却达70%左右的市场占有率,均价千元左右.由于外资品牌的研发保留在本土,且中国内地企业尚未形成自主设计体系,基本限于OEM(Original Equipment Manufacturer)模式,以致产品附加值很低,出口价仅为台湾地区产品的1/6[3].随着人们对个性化追求的日益凸显,老牌企业也因设计陈旧在与外资品牌的竞争中显得捉襟见肘.因此在2012年的中国国际自行车展览会中,永久、凤凰、五羊等国内老牌自行车企业纷纷推出了新款的中高端自行车,并共同签署了《创新驱动,转型发展——中国自行车著名品牌再崛起宣言》[4],这充分表明了这些企业在急需转型的大环境下重新崛起的决心.
目前,我国自行车设计依然是通过人机工程学进行外观的美化或细节的改进,如李亚南、吴小凡等[5- 6]通过LifeMOD进行了骑行动作的状态分析以及基于正交试验的自行车参数优化,但仍然没有实现真正的全面创新设计.在国外Soden等[7]对骑车的蹬踏力进行第一次系统分析,证明了脚踏板瞬时蹬踏力最高能达体重的3倍;而Ray等[8]首先通过实际观察对骑车者进行定量评估,包括各施力关节的力矩,大、小腿的角加速度和输出力等;Redfield等[9]则通过在恒定骑速下对脚踏板上测试的数据进行分析,获得了曲柄转角和各关节转矩的关系,同时研究小组也将键合图法(Bond Graph)[10]融入自行车分析与设计中.这类方程组的获得要比一般多耦合能量的对象所推导出来的表达式容易得多,合理地简化了肢体组成的复杂性,也简化了山地车在冲刺、倾斜飞跃等场合下动态性能的全面探讨和分析[11].Baum等[12]则采用实验方法,通过人体测试仪器收集骑车时的肌电信号数据来研究运动过程中的下肢肌群拮抗关系,并获得了两侧下肢在不同曲柄转角位置的各肢体肌肉受力情况.
文中主要通过生物力学和机构学的特点建立连杆化的人车模型,对骑行时的下肢运动的动态特性进行较为全面的分析,为自行车创新设计提供基础性依据.
1人车连杆模型的建立
1.1人车模型连杆化转化
从力学性能来看,人体骨骼的功能是承受拉压应力和弯曲应力,与一般刚性材料的力学特性接近,其10%应变产生的应力为σ10%=4 MPa[13- 14],因此模型中的骨骼可等效为刚性连杆,记为Li.
骨骼肌收缩所产生的作用由肌腱传递到骨头上,从而令下肢发力,并通过协同作用实现关节转动,因此骨骼肌等效为动力源;而下肢的滑膜关节对人体动作起主要作用,可等效为转动副:髋关节主要承受人体重量,结构较为牢固,在骑行过程中固定在鞍座上,大腿可绕其进行一定幅度的摆动,因此等效为固定铰支座;膝关节连接的大、小腿骨骼肌具有伸屈自由度,同时大、小腿可绕膝关节大幅度转动,可等效为活动铰链;而踝关节具有内外旋转,内外翻转等球形铰链的运动方式,而骑行过程主要为小腿相对脚掌绕踝关节的定轴转动,因此踝关节可在正中面上等效为活动铰链.
而实际骑行中,踝关节根据实际骑行状况调节蹬踏力的施力角度,因此许多研究中[13]把曲柄和踝关节等效为一体,且模型转换的实质影响较小[14].综上所述,人车模型如图1所示,其中H、K、A和C分别表示髋关节、膝关节、踝关节和中轴位置,Lt、Ls以及Lc分别代表大、小腿和曲柄长度,Gt和Gs分别为大、小腿重心位置,下标l表示左侧下肢.
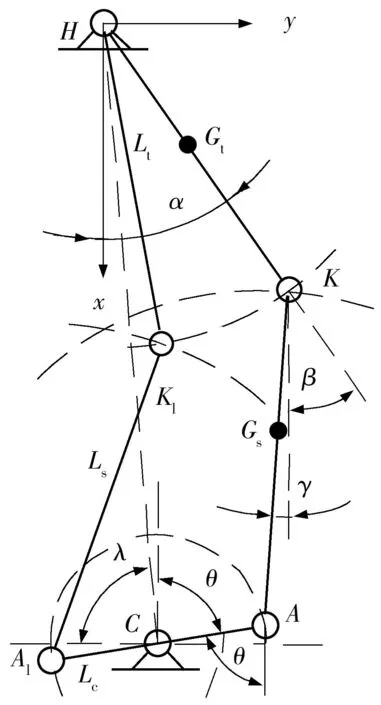
图1 人车连杆模型
1.2人车模型参数计算

mi=Mci+MwiG+MhiHg
(1)
Gi=Gci+GwiG+GhiHg
(2)
Ii=Ici+IwiG+IhiHg
(3)
表1人体尺寸经验公式系数与模型参数1)
Table 1Empirical formula coefficients and model parameters of human body

人体下肢各肢体经验公式系数大腿小腿质量系数系列质量固有系数Mci-2.6490-1.5920质量-体重系数Mwi0.14630.0362质量-身高系数Mhi0.01370.0121重心系数系列重心固有系数Gci-2.4200-6.0500重心-体重系数Gwi0.0380-0.0039重心-身高系数Ghi0.13500.1420转动惯量系数系列惯量固有系数Ici-3690-1152惯量-体重系数Iwi32.02004.5940惯量-身高系数Ihi19.24006.8150测试者人体尺寸质量mi/kg9.258 2.8785重心Gi/cm23.67518.5465横轴转动惯量Ii/(kg·cm2)1758.3 339.235
1)i为t时表示大腿,i为s时表示小腿.
2人车模型动态分析
2.1运动学分析

(4)
为明确曲柄转角与髋关节转角的关系,以曲柄转角θ衡量骑行过程中髋关节受到的影响,将式(4)左右同时除以Ls,并分别定义a、b、c为
(5)
结合式(5)和“sin2θ+cos2θ=1”,可整理得
(6)
而膝关节转角可表示为β=α+γ.同理可获得小腿与新坐标x轴的垂直线夹角γ,并证得γ表达式:
(7)
(8)
根据式(6)和(7)进行仿真,即可获得在一个周期内髋关节、膝关节的角位移和角速度的关系曲线,如图2所示.

(a)髋关节角速度和角位移曲线
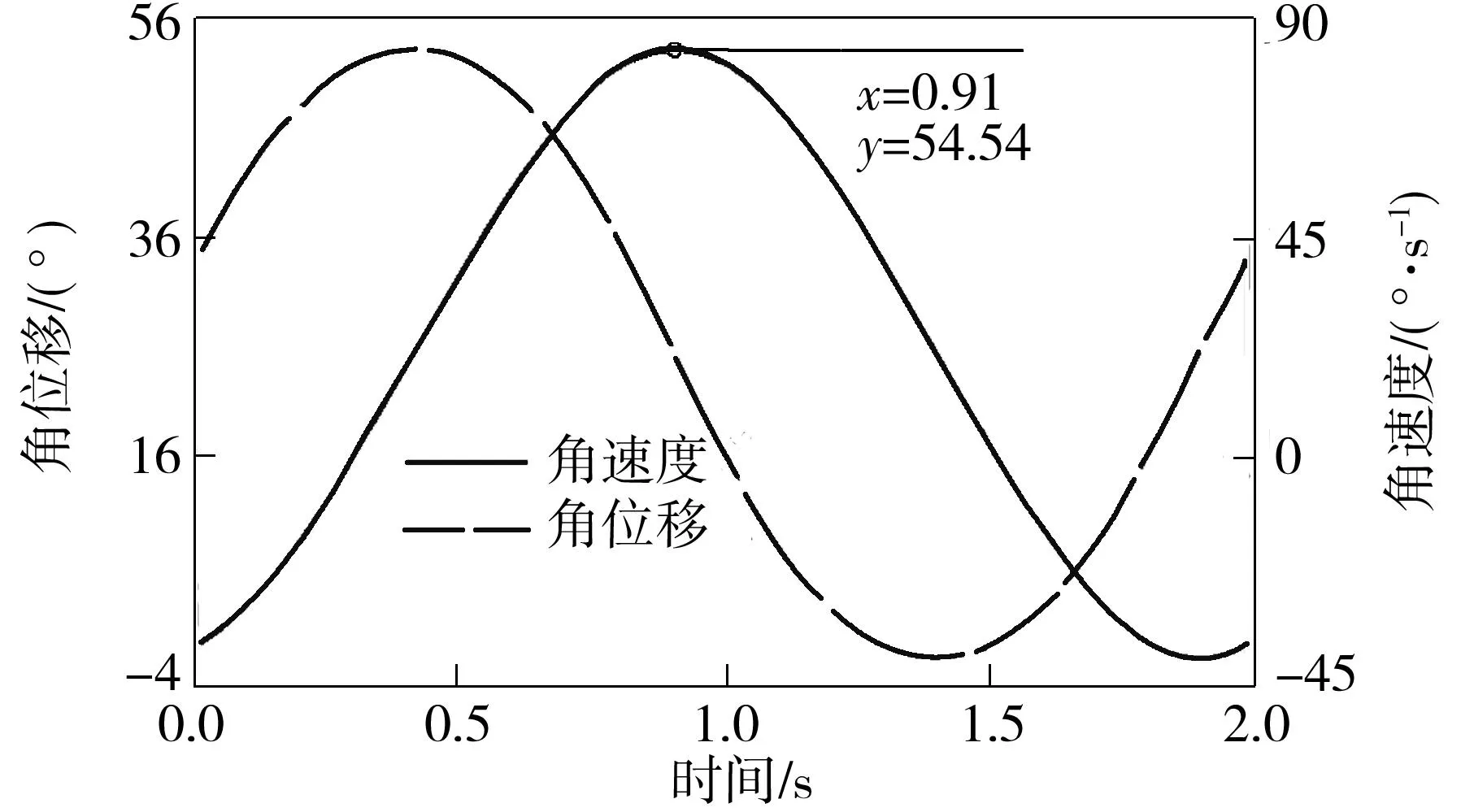
(b)膝关节角速度与角位移的曲线
Fig.2Curves of angular velocity and displacement of each joint in legs
2.2运动学分析
为进一步理解模型的能量传递关系,现隔离外界环境,进行动力学分析.人体做功Wd主要来自下肢肌力转换的大腿动能Et和小腿动能Es.骑行时下肢各肢体绕其关节转动,另一方面进行移动,因此包括移动动能和转动动能.单侧大腿动能表示为
(9)
而小腿重心位置xGs可表示为
xGs=Ltcosα+LKGscosγ,
yGs=Ltsinα-LKGssinγ,
则单侧小腿动能Es表示为
Es=Esm+Esr
(10)


式中,Etm、Etr分别为大腿的移动动能和转动动能,Esm、Esr分别为小腿的移动动能和转动动能,mt、ms、IGs、IGt分别为大、小腿的质量和转动惯量,LKGs为膝关节到小腿重心的距离.以曲柄转角θ为广义坐标,则由式(9)和(10),动能Wd可表达为
(11)
左下肢势能Wg包括大、小腿势能Wt和Ws,即
Wg(θ)=mtgLHGtsinα+msg(Ltsinα-LKGssinγ)
(12)
式中,LHGt为髋关节到大腿重心的距离.

(13)

(14)
由Lagrange方程可知,势能与关节速度无关[8],则曲柄广义力距Mp、下肢势能总和Wda和动能总和Wga分别为
(15)
(16)

(17)
把式(16)和(17)代入式(15)中,可得
(18)
人车模型等效广义力矩即为3中的曲线.
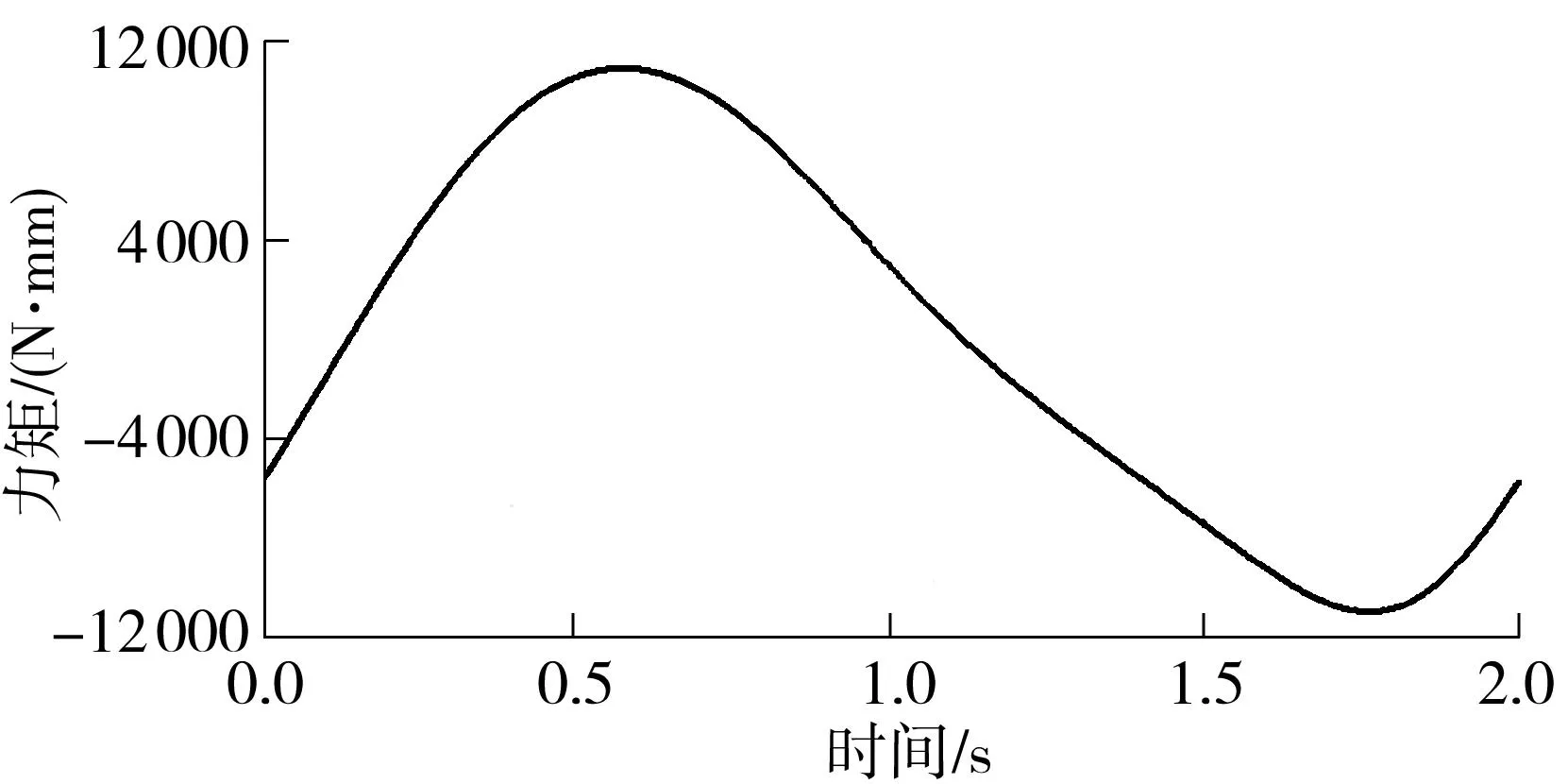
图3 曲柄广义力矩曲线
3自行车骑行特性分析
3.1骑行效率
骑行过程中,踝关节能自发调节脚部角度,假设在该过程中的蹬踏力大小恒定,作用方向保持如图4中所示,其中Fpt和Fpn分别为蹬踏力Fp的切向和法向分量.
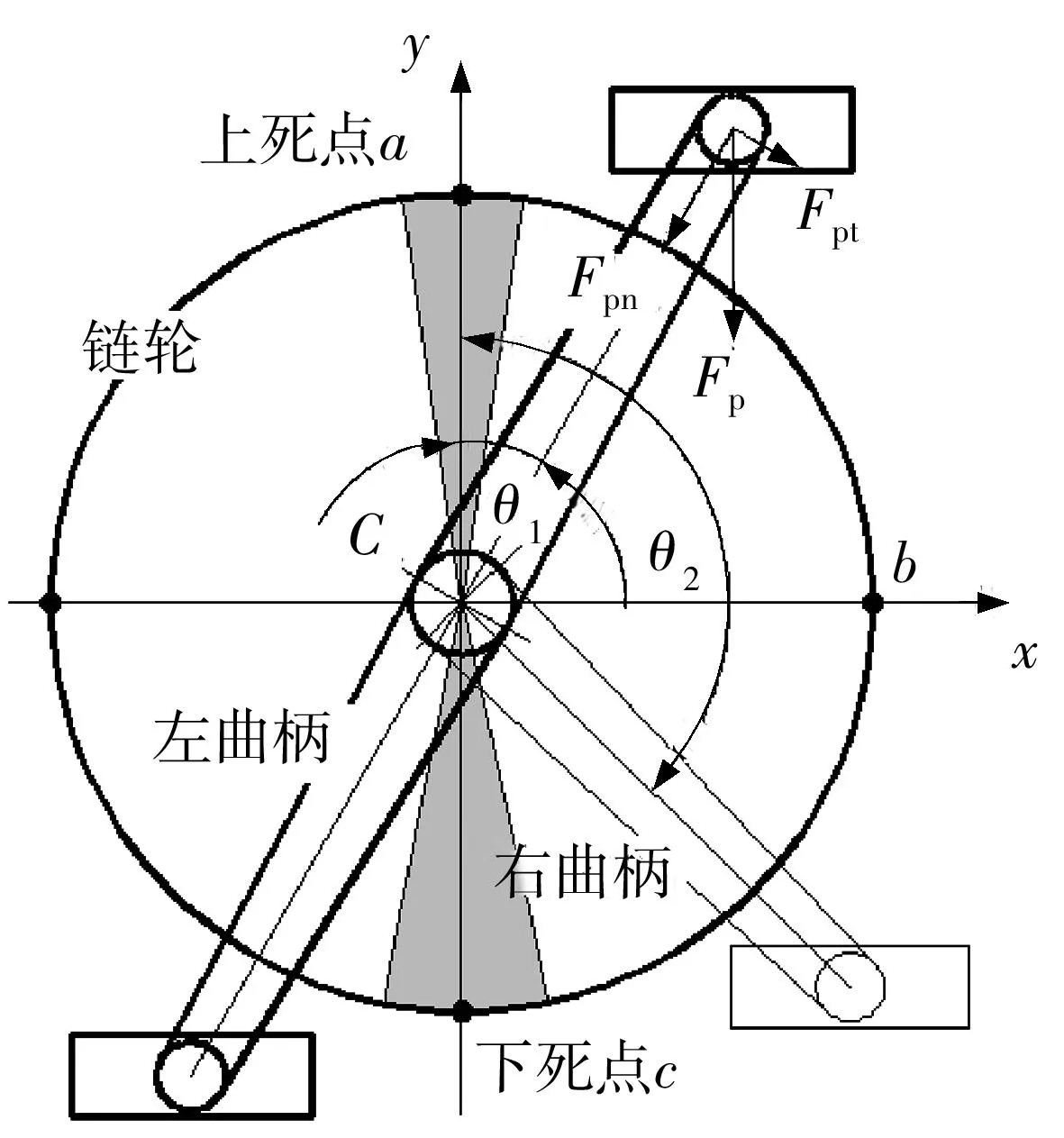
图4 骑行过程的蹬踏状态
(19)
(20)
(21)
通过踝关节调节使骑行做功达到最大量Wi,即
(22)
则平均蹬踏力效率ζ为
(23)
在忽略地形等外部因素和自行车内部摩擦力的情况下,曲柄周转骑行的效率不足65%,仍有至少35%的人体能耗浪费,图5中的Fp与Fpmax之间的面积差即为人体机能的无效做功.
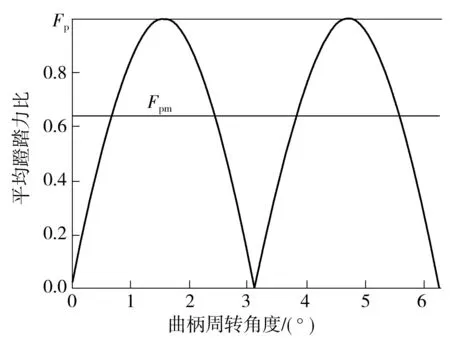
图5 蹬踏力-曲柄周转关系曲线
3.2骑行死区
骑行死点是传统自行车一直存在的问题,如图1的A、C两点所示.死点处的蹬踏力矩为零,而死点附近的骑行效率也较低.现定义骑行效率低于η,在骑行死点附近“±φ”的区间为骑行死区,即图4的阴影所示.获得髋关节的角位移和角速度,在图2(a)中,测得髋关节在曲柄0°~28.8°之间反方向转动3.4°.在该范围内的效率较低,因为完成蹬踏动作时,膝关节必须上提,整个下肢必须克服重力.由此可确定上下死点的±28.8°为骑行死区.
因此,自行车设计的新思路不仅是如何避免骑行死点,还需要充分考虑骑行死区的问题,以进一步提高自行车的骑行性能.
3.3下肢骑行的联动杠杆效应
设髋关节、膝关节和踝关节的运动速度分别为v0、v1和v2,髋关节和膝关节角速度分别为ω0和ω1,而由理论力学复合运动公式可得
v1=v0+ω1×Lt,
v2=v1+ω2×Ls.
自行车中轴轴心与髋关节都是相对静止的,因此速度相同,即为v0.由此可证得
ω1Lt+ω2Ls+ω3Lc=ω4LHC
(24)
由式(24)可知下肢蹬踏时,下肢各关节速度与自行车中轴的速度互相制约,不能割裂地只将髋关节或膝关节作为动力源.若要想增加膝关节的速度,就必须提高髋关节的速度.同理可得到图6.

图6 骑行联动杠杆效应
虽然大、小腿角速度是蹬踏力关键来源,但踝关节的调节和曲柄搭配尺寸的提速作用也不容忽视.因此在自行车设计中需要好好利用这一特点.
4关节受力分析
4.1关节的牛顿-欧拉方程建立
采用拉格朗日法建立动力学模型时未考虑各个关节受力情况,因此仍需通过牛顿-欧拉方程对关节受力进行分析.以大腿为研究对象:
(25)
以小腿为研究对象:
(26)
以等效曲柄为研究对象:
FAxLcy+FAyLcx-Mc=0
(27)
为表示蹬踏力形成过程中各力的组成,归纳为矩阵形式Ax=b1+b2+b3,其中A是人车模型的传力矩阵,内部正负号根据实际曲柄转角确定:
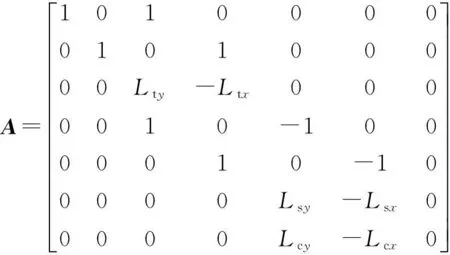
而x是人车系统中各关节的受力;b1是惯性力分量;b2是重力分量;b3是肌肉力情况.
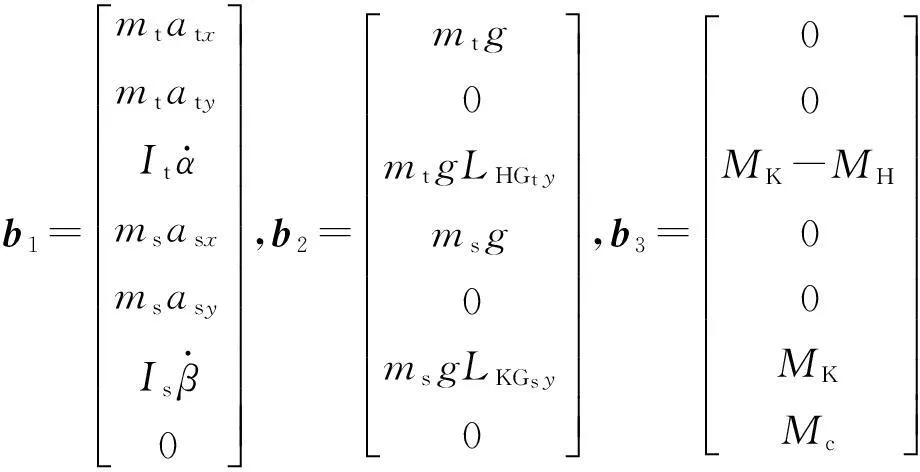
由上述分析可知,总蹬踏力由肌肉力和非肌肉力组成,其中非肌肉力即重力和惯性力的合力.
4.2受力情况
由|A|≠0可知,该方程有唯一解,则髋关节、膝关节和踝关节的曲线解如图7-10所示.
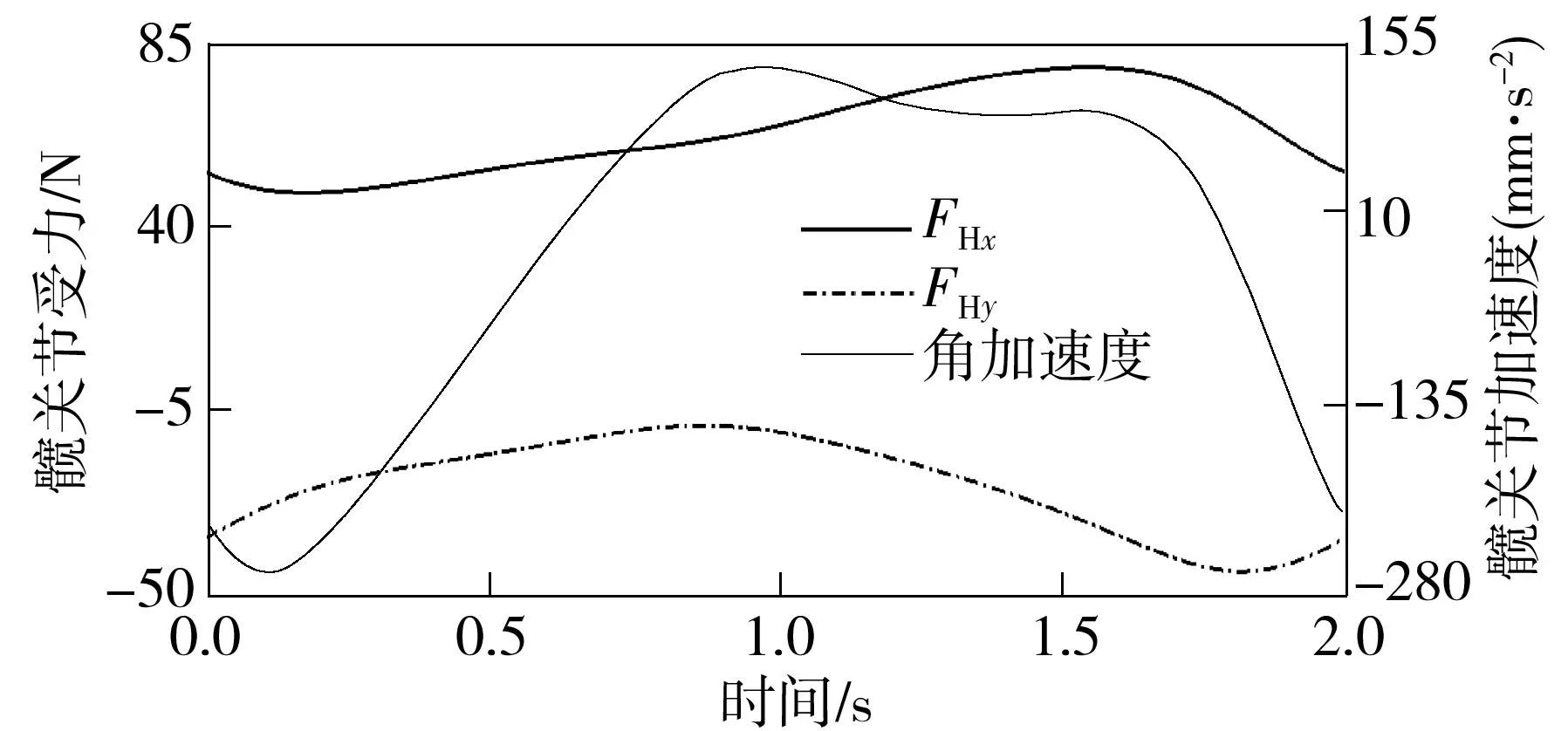
图7 FHx、FHy和髋关节角加速度曲线
Fig.7Curves ofFHx,FHyand hip joint angular acceleration

图8 FKx、FKy与膝关节相对角加速度曲线
Fig.8Curves ofFKx、FKyand keen joint angular acceleration

图9 asx与asy的关系曲线
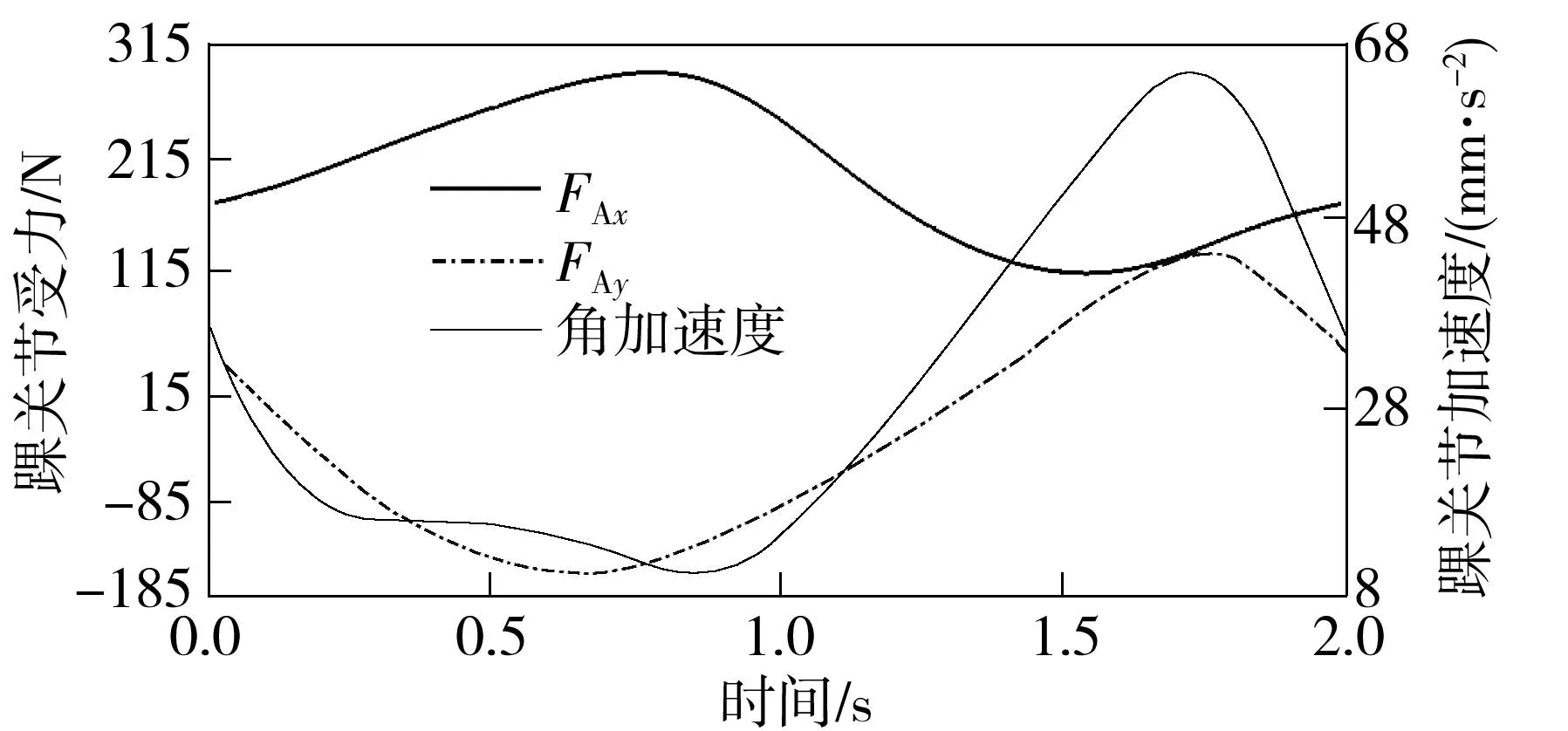
图10 FAx、FAy与踝关节加速度曲线
Fig.10Curves ofFAx,FAyand ankle joint angular acceleration
由人体生物特性可知,大腿重量最大,肌肉发达,因此垂直分量FHx和水平分量FHy的肌肉力都较大,是主要的蹬踏力来源.而由图可知,髋关节摆幅稳定,运动范围相对较小,因此受力变化比较平缓.由于骑行死区的原因,髋关节在蹬踏范围的加速度表现为先减小后增大.在曲柄回复阶段,为使小腿完成屈膝运动,大腿会再向下转动较小角度,因此在后半段呈现平缓的加速.
小腿和膝关节受力状态比较复杂.小腿作为蹬踏力传递的中间环节和部分施力源,其垂直分量FKx和水平分量FKy变化较大,因此该部分也较容易疲劳和损伤.由图可知,蹬踏期间的受力变化比曲柄回复时的受力变化平缓.从四杆机构的角度来看,曲柄回复期间小腿经历过极位夹角,因此产生急回运动,受力变化比蹬踏期间强烈.
因为踝关节对蹬踏产生协调作用,其垂直分量FAx和水平分量FAy的变化趋势与膝关节的变化一致,如图所示.同时FAx和FAy的曲线表征了蹬踏力的变化,垂直分量FAx先增大后减小,符合理想情况下实际蹬踏力的变化.在蹬踏期间,下肢处于向下伸展姿态,下肢肌肉力的传递性较好,因此踝关节的角加速度变化比较缓慢;而在曲柄回复阶段,下肢处于屈膝状态,小腿与曲柄夹角变小,踝关节需要调节的范围增大,因此在相同时间内角加速度会明显上升,以快速调整脚部位置.
5新型自行车设计思路
综上所述,人体的蹬踏做功效率主要集中在以曲柄90°为对称中心的区域内;蹬踏力主要由大部分垂直力和小部分水平分力组成,下肢重力和惯性力组成的非肌肉力b1+b2部分也能发挥较大作用.在蹬踏期间,各关节受力曲线斜率更小,表现为肌肉收到的交变力更缓和,不会发生曲柄在回复期间的较大突变.因此可设计一种新型自行车,能够同时避免骑行死区和曲柄回程运动,其骑行方式主要为曲柄往复式摆动,类似人的踏步动作.传统和新型骑行方式的骑行曲线如图11所示.
通过不同骑行方式的效率与人体骑行的输出做功的理论数值相比,即可获得骑行效率ζ:
(28)
由图5和式(27)可知,骑行区间的减少使单周期的骑行时间得到缩短,在单位时间内,
新的骑行
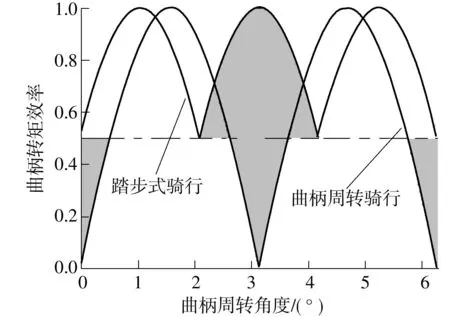
图11 新旧蹬踏方式的做功对比
方式能让自行车获得更多动能.若以曲柄周转骑行时的平均有效蹬踏力Fm作为新蹬踏区间的设计标准,即arcsin 0.637 7=39.6°,则此时ζ=87.78%;当φ=30°时,以相同蹬踏速度骑行,新方式的骑行效率为ζ=82.7%,与原蹬踏方式的骑行效率相比,其增加的动能等于图11所示的阴影面积.当φ=45°时,ζ=90.03%;当φ→90°时,limζ=100%.可见这种骑行方法的人体机能利用率得到了有效提高.
根据以上原理设计了如图12所示的一种模仿人体踏步行走的自行车传动结构[17- 18],装有这类传动结构的自行车是通过三组外啮合齿轮[19]和两个单向联轴器实现曲柄换向,中间惰轮进行左右曲柄换向和传动.在该结构方案中,为避免左右曲柄的运动出现延迟,要求中间惰轮传动比为1,左右侧啮合齿轮分别保证传动比相等,即左右齿轮的主动轮和从动轮齿数分别相等.

图12 新型自行车传动结构的三维模型示意图
Fig.12Schematic diagram of the 3D model of transmission device in new bicycle
1—右从动齿轮;2—传动箱挡板;3—轴承端盖;4—后惰轮;
5—右传动轴;6—前惰轮;7—左传动轴;8—左从动齿轮;
9—左曲柄;10—左主动齿轮;11—中轴;12—链轮;13—右曲柄
图13所示的自行车是在五羊牌WY- 01型自行车的基础上,结合齿轮传动机构进行改装,加工材料均采用45号钢,齿轮箱直接与电镀车架焊接为一体.骑行时下肢能够明显感受到踏步式自行车中的曲柄往复摆动起来十分轻巧,蹬踏起来十分轻松.无论在直路还是转弯处的操控性都可达到与一般自行车相同的效果.

图13 踏步式自行车的改造实物图
6结语
文中根据人体生理特性与骑行动作建立了人车连杆模型,并结合人体尺寸实际测量值与经验公式的方法获得该模型的详细参数,为自行车分析与设计提供了模型基础.采用拉格朗日法建立了人车模型的运动学和动力学模型;从机构学和理论力学角度出发,分析了人体运动的骨联动效应、骑行效率和死点、死区问题.通过牛顿-欧拉方程对人体下肢关节进行分析,获得了关节在骑行过程的变化曲线图,并根据全文分析结果进行自行车设计探讨.最后以文中相关研究为基础进行了新型骑行方式与传统骑行方式的效率分析,并以此为出发点完成了新型自行车的初步设计.
参考文献:
[1]武云甫,苗栓明,景洪兰.发展城市自行车专用道路 [J].城市公用事业,2003,17(2):11- 12.
WU Yun-fu,MIAO Shuan-ming,JING Hong-lan.Setting up urban exclusive bike ways [J].Public Utilities,2003,17(2):11- 12.
[2]江国强,陆滢.世界自行车行业现状及今后发展趋势 [J].中国自行车,2006(12):9.
JIANG Guo-qiang,LU Ying.Current industry and deve-lopment tend of bicycle in the world [J].China Bicycle,2006(12):9.
[3]双喜.海外信息 [J].中国自行车,2007(10):48- 51.
SHUANG Xi.Foreign information [J].China Bicycle,2007(10):48- 51.
[4]颜涛.中国自行车本土品牌经营现状与对策 [J].中国自行车,2010(1):46- 47.
YAN Tao.Current situation of local brand management present situation and the countermeasures of Chinese bicycle industry [J].China Bicycle,2010(1):46- 47.
[5]李亚南.运动型自行车车架设计方法研究 [D].天津:天津大学机械工程学院,2012.
[6]吴小凡.基于人机工程学的自行车设计方法研究与应用 [D].天津:天津大学机械工程学院,2008.
[7]SODEN P D,ADEYEFA B A.Forces applied to a bicycle during normal cycling [J].Biomech,1979,14:843- 856.
[8]RAY P S H,THOMLINSON Ma,TU Y S.Kinematics and kinetics of a non-circular bicycle drive system [J].Mec-hanism and Machine Theory,1991,44:383.
[9]REDFIELD R,HULL M L.On the relation between joint moments and pedaling rates at constant power in bicycling [J].Biomech,1986,19:317- 329.
[10]REDFIELD R C.Planar,large excursion bond graph model for full suspensionmountain biking [C]∥Proceedings of Asme International Mechanical Engineering Congress & Exposition.Seattle:[s.n.],2005:1157- 1165.
[11]BERRY M J,KOVES T R,BENEDETTO J J.The influence of speed,grade and mass during simulated off road bicycling [J].Applied Ergonomics,2000,31(5):531- 536.[12]BAUM B S,LI L.Lower extremity muscle activities during cycling are influenced by load and frequency [J].Journal of Electromyography and Kinesiology,2003,13:181- 190.
[13]SEBASTIEN D,WILLIAM B.Muscular activity during uphill cycling:Effect of slope,posture,hand grip position and constrained bicycle lateral sways [J].Journal of Electromyography and Kinesiolagy,2008,18:116- 127.[14]张佳帆,陈鹰,杨灿军.柔性外骨骼人机智能系统 [M].北京:科学出版社,2011:35- 38,160.
[15]姜洪源,马长波,陆念力,等.功能性电刺激脚踏车训练系统建模及仿真分析 [J].系统仿真学报,2010,22(10):2459- 2463.JIANG Hong-yuan,MA Chang-bo,LU Nian-li,et al.Modeling and simulation on FES cycling training system [J].Journal of System Simulation,2010,22(10):2459- 2463.[16]ZATSIORSKY V,SELUYANOV V.The mass and inertia characteristics of the main segments of the human body [J].Series Biomechanics,Biomechanics VIII-B,1983,4(1):1152- 1159.
Fixed-Frequency Hysteresis Control Based on Optimal Space Vector
ZENGJiangCHENHao-pingGUZhi-pengHuangHai-ying
(School of Electric Power, South China University of Technology, Guangzhou 510640, Guangdong, China)
Abstract:Proposed in this paper is a novel hysteresis current control method based on the optimal space vector for active power filters with constant switching frequency. In this method, the hysteresis width of the next cycle is linearly predicted by the previous switching time, and the switching phase is aligned with a clock signal with fixed frequency, thus achieving the discontinuous SVPWM(Space Vector Pulse Width Modulation)based on optimal space vector. Moreover, two kinds of discontinuous SVPWM modes are used alternately to further reduce the current error. The effectiveness of the proposed method is finally verified by means of PSCAD/EMTDC simulation.
Key words:active power filter; optimal space vector; space vector pulse width modulation; hysteresis current control; constant frequency
doi:10.3969/j.issn.1000-565X.2016.02.008
中图分类号:TH 112
文章编号:1000- 565X(2016)02- 0046- 07
作者简介:吴上生(1963-),男,博士,教授,主要从事机械装备自动控制理论与应用研究.E-mail:shshwu@scut.edu.cn
*基金项目:广东省科技计划项目(2013B011301006)
收稿日期:2015- 06- 24
Foundation item: Supported by the Guangdong Province Science and Technology Planning Project(2013B011301006)
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
黑龙江大学自然科学学报(2022年1期)2022-03-29
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
通信电源技术(2016年1期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11
浙江大学学报(工学版)(2015年2期)2015-05-30
