天宝TX8三维激光扫描仪在风电厂风机变形监测中的应用
2016-05-06 05:28:15李斌,尹潇,卢涛等
测绘通报 2016年3期
天宝TX8三维激光扫描仪在风电厂风机变形监测中的应用
李斌1,尹潇1,卢涛2,刘秀涵2
(1. 山东电力工程咨询院有限公司,山东 济南 250000; 2. 北京麦格天渱科技发展有限公司,北京 100000)
从基础施工到风机并网发电,是一个长周期的过程,具有监测周期长、频率高等特点。传统的方法是利用GPS或全站仪进行单点式监测,其不足是监测点少,难以进行全局的监测。而利用三维激光扫描仪无需接触目标本身即能快速、连续、自动地获取海量点云数据,高精度生成三维模型,避免基于点数据造成的局部性和片面性。因此,本文利用天宝TX8三维激光扫描仪对某风电场风机进行监测,以验证其能否达到传统方法的精度。
一、天宝TX8三维激光扫描仪简介
TX8配置了“闪电”激光技术,并结合了脉冲技术和相位技术。在120 m测程范围内,能够同时保持每秒100万个点的速度和2 mm的精度来获取数据(如图1所示)。扩展至340 m测程范围时,也可达到每秒40万个点的速度。
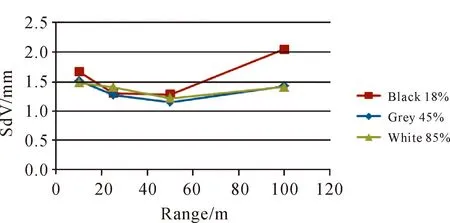
图1 TX8测距精度
高频的数据采集使得外业扫描站与站之间的间隔越来越短,提高了扫描效率。同时,受益于 “闪电”技术,TX8受目标表面类型和大气条件的影响非常小,对于困难的5%反射率表面也能达到近80%的获取率,确保了结果的完整性。对于海量数据,TX8有着实时的纯化。相比于后处理方式的扫描技术,TX8有效避免了波效应、圆角效应及边缘效应。同时,TX8高效的数据流,也实现了实时寄生虫噪声点过滤,可现场进行数据质检,减小了返工的可能性。另外,TX8尝试进行了内业全自动无目标配准。与传统的外业布靶相比,减少了作业时间,减轻了外业负担,增加了可行性。
二、应用实例
本文对某风电场的已运行风机进行监测试验,为了进行对比分析,同时利用传统的全站仪进行了监测。考虑到风机为圆形物体,周围布设由6个监测点组成的高精度监测基准网,如图2所示。

图2 监测基准点示意图
基准网建立后,分别架设在不同基准点上进行扫描,扫描时保证测站间有数据重叠。同时,为了对比,在风机上均匀布设了10个反光片,利用全站仪前方交会法计算其三维坐标。
获取海量点云数据后,将原始数据导入到数据处理软件,经过数据预处理、数据拼接、建模获取风机的高精度三维局部及整体模型,如图3和图4所示。

图3 局部三维模型

图4 整体三维模型
对扫描的反光片坐标经过坐标转换及系统误差改正后与全站仪前方交会的三维坐标进行对比,得到10个点的坐标差值序列,如图5所示。
由图5可知,10个反光片的扫描点位中误差在3 mm左右,基本满足了建筑变形测量规范的要求,可以进行风电场风机的变形监测。

图5 坐标差值序列
三、结束语
对风机进行变形监测,可以验证设计水平、施工质量及安全运行情况,对于出现的异常变形,也可以通过变形曲线提前做到预警,因此这是保障风机安全发电的重要措施。本文利用天宝三维激光扫描仪对风机进行监测,达到了传统全站仪监测的精度,且更加快速、全面和高效,其主要优点有:
1) 三维激光扫描技术不仅具有高精度、非接触测量等特点,而且能够快速获得大量的扫描数据,准确地找到圆形建筑物的关键位置点,大幅度提高外业作业效率;同时在远离扫描目标的情况下,可获得大量数据,减少设站频率。
2) 三维激光扫描仪能高效率、高精度地采集到目标表面的点云数据,有效地避免传统变形监测技术中,采用设置监测点方法(即以点代面的分析方法)所带来的局部性和片面性。监测作业无需布设监测点,实现了测量传统的点监测到面监测的转变,而且数据更加直观结果更加丰富,说服力更强。
3) 地面三维激光扫描技术的测量方式和数据结构完全不同于传统的测量手段,其数据处理也完全不同于已有的理论方法,获取数据的特点和方式弥补了传统测量方法的弊端。
(本专栏由天宝测量部和本刊编辑部共同主办)
猜你喜欢
橡胶科技(2022年12期)2023-01-03 02:36:40
池州学院学报(2022年2期)2022-05-30 04:29:20
西部交通科技(2021年9期)2021-01-11 12:55:36
文苑(2019年20期)2019-11-16 08:52:34
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
中华戏曲(2017年1期)2017-02-16 07:10:32
中国房地产业(2016年2期)2016-03-01 01:25:35
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58