珠海市陆海统一高精度GNSS控制网数据处理与精度评估方法研究
2016-05-06 05:30:18丁建勋胡冬芽马德富高春辉
测绘通报 2016年3期
丁建勋,胡冬芽,马德富,高春辉
(珠海市测绘院,广东 珠海 519015)
珠海市陆海统一高精度GNSS控制网数据处理与精度评估方法研究
丁建勋,胡冬芽,马德富,高春辉
(珠海市测绘院,广东 珠海 519015)
Data Processing and Precision Analysis of Terrestrial and Marine Unified High Precision GNSS Control Network of Zhuhai
DING Jianxun,HU Dongya,MA Defu,GAO Chunhui
摘要:珠海市陆海统一GPS控制网包括由12个CORS站组成的框架网和由66个C级点组成的C级网。本文采用GAMIT/GLOBK软件,应用不同的数据处理策略对框架网和C级网进行了数据处理,主要分两步完成:①以IGS站为基准处理框架网;②以框架网为基准处理C级网。最后采用GLOBK平差得到控制网在CGCS2000和GDCORS坐标框架下的三维坐标。通过对基线解算后的NRMS值、重复性、中误差及平差后测站点位中误差的分析和探讨,总结了一套市级高精度GPS控制网数据处理与精度评估方法。
关键词:GNSS控制网;精度评估;精密数据处理
珠海市陆海总面积约7653 km2,其中陆地面积约1688 km2,海域面积约5965 km2。全市共有大小岛屿146个,海岛总面积超过240 km2。其海域面积是陆地面积的近5倍,地貌类型有山地、丘陵、平原和海岛。陆地地势平缓,倚山傍海,自西北向东南倾斜。为满足珠海市陆海统一似大地水准面精化的需要,按照统一规划、整体设计的原则,以新建的珠海北斗CORS(ZHBDCORS)和珠海及周边的广东CORS(GDCORS)基准站为基础,将陆域基础控制网拓展至珠海所覆盖的主要岛屿,布设了覆盖全市陆海统一的,集平面、高程、重力场信息于一体的综合性基础控制网,形成由大地基准、高程基准等组成的珠海市陆海统一的现代测绘基准体系。本文以珠海市陆海统一高精度GNSS控制网数据为基础,探讨了陆海统一的高精度GNSS控制网基线数据处理的关键技术,为今后建立陆海统一的控制网提供了有益的技术参考。
一、GNSS网布设
根据设计原则,在珠海市设计建立了由66个C级点构成的GPS C级网,独立基线的平均长度为5~8 km;框架网由12个CORS站(BOSH、DMGH、DMGT、DONA、FUSH、GUIS、JWGT、NLGT、QIAO、SCHY、WALD、ZHGT,其中NLGT为广东省CORS基准站,其余11个站为珠海CORS基准站)构成。
每个C级点至少观测2个时段,每个时段至少4 h。对于框架网,则收集了13 d连续运行的观测收据。
二、基线处理
本文以珠海市陆海统一高精度GPS控制网数据为基础,采用GAMIT/GLOBK软件[1-2],数据处理分两步完成:①引入全球跟踪站,并将这些国际永久跟踪站作为GPS框架网(12个CORS站)基线解算的约束基准;②以CORS站为基准解算C级网。
GAMIT/GLOBK软件采用双差观测值解算,可以确定地面站的三维坐标,以及对空中飞行物定轨,在利用精密星历的情况下,基线解的相对精度能够达到10-9左右,是世界上最优秀的GPS软件之一。我国A、B级GPS网的基线解算就是采用该软件进行的[3]。基线的解算以同步时段为单位进行,每个时段求解时,主要考虑如下因素:
1) 卫星钟差的模型改正(采用广播星历中的钟差参数)。
2) 接收机钟差的模型改正(采用根据伪距观测值计算出的钟差)。
3) 电离层折射影响用LC观测值消除。
4) 对流层折射根据标准大气模型用萨斯坦莫宁(Saastamoinen)模型改正,框架网采用分段线形的方法估算折射量偏差数,C级网基线较短,主要采用双差方法来削弱对流层延迟误差的影响。
5) 卫星和接收机天线相位中心改正,接收机天线L1、L2相位中心偏差采用GAMIT软件的设定值。
6) 测站位置的潮汐改正。
7) 截止高度角为15°,历元间隔为30 s。
按照上述数据处理策略,分两步来对GPS控制网进行处理,首先处理GPS框架网(CORS站组成),然后以框架网为基准处理C级网。
1. 框架网(CORS站)基线处理
GPS框架网由12个基准站组成,观测时间为2014年4月13—18日,以及2014年6月22—28日,共13 d,每天24 h的数据,采用双频接收机,采样率30 s,每个测站观测时段数大于2,数据观测质量良好。
在GPS精密相对定位数据处理中,定位的基准是由卫星星历和基准站坐标共同给出的。由于卫星精密星历的参考框架是ITRF,因此为了得到高精度的GPS框架网的基线处理结果,采用精密星历的同时还需引入高精度的IGS站作为起算点以减少由于星历和起算点误差对基线解算的影响[4]。在该GPS框架网处理中引入了中国及其周边的11个全球跟踪站(BJFS、URUM、USUD、WUHN、POL2、KIT3、SHAO、TNML、LHAZ、CHAN、SUWN)作为基线解算的约束基准,并同时考虑轨道误差的影响,对轨道施加紧约束。
2. C级网基线处理
C级网由66个点组成,同步图形之间采用边连接或网连接,作业模式为静态定位,观测要求见表1。观测于2014年4月11日—4月28日进行,采用的接收机为高精度Trimble GPS双频接收机,天线类型有ASH701945C_M、TRM29659.00和TRM59800.00,外业观测质量良好。
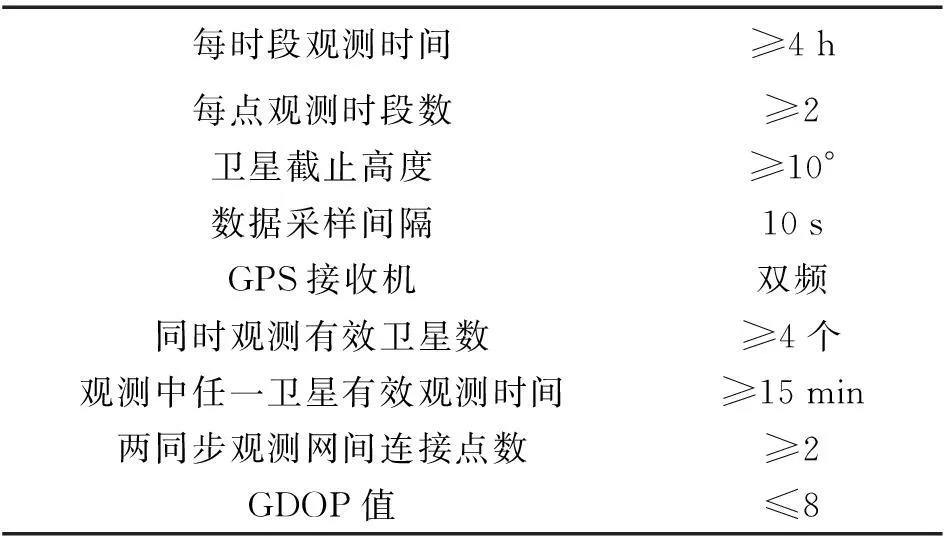
表1 C级网观测要求
C级网的基线处理方案基本与框架网的方案相同。不同之处说明如下:
1) C级网的起算点为框架网,对于整个GPS网,先从有框架点的同步观测网开始解算,解算时,将框架点坐标作为松驰的坐标基准,然后用推算得到的未知测站的坐标作为基准来解算相邻的同步观测网,乃至整个GPS控制网。框架网起算点地心坐标纬度、经度、矢径的松驰量分别为0.050、0.050、0.100 m。
2) 历元间隔为10 s,且不考虑卫星轨道误差,即固定IGS轨道。
三、基线解算质量评估方法
1. 同步环检核
GAMIT基线处理结果保存在解算成功后所生成的o文件中,由于GAMIT软件采用的是网解(即全组合解),其同步环闭合差在基线解算时已经进行了分配。对于GAMIT软件的基线解,可以把基线解的标准化的均方根误差(normalized root mean square,NRMS)值作为同步环质量好坏的一个指标[5]。一般认为NRMS值在0.12~0.50之间是合理的[6],若大于0.5,则表明该解算结果不可靠。
框架网共有13个时段,各个时段解算结果的NRMS值均在0.16~0.18之间,最小的为0.160,最大的为0.177,如图1所示。C级网计算了49个时段,NRMS值全部小于0.5,大于0.3的有10个,最大的为0.404,如图2所示。总体来说,GPS网的整体外业观测质量较高,基线解的精度较好。
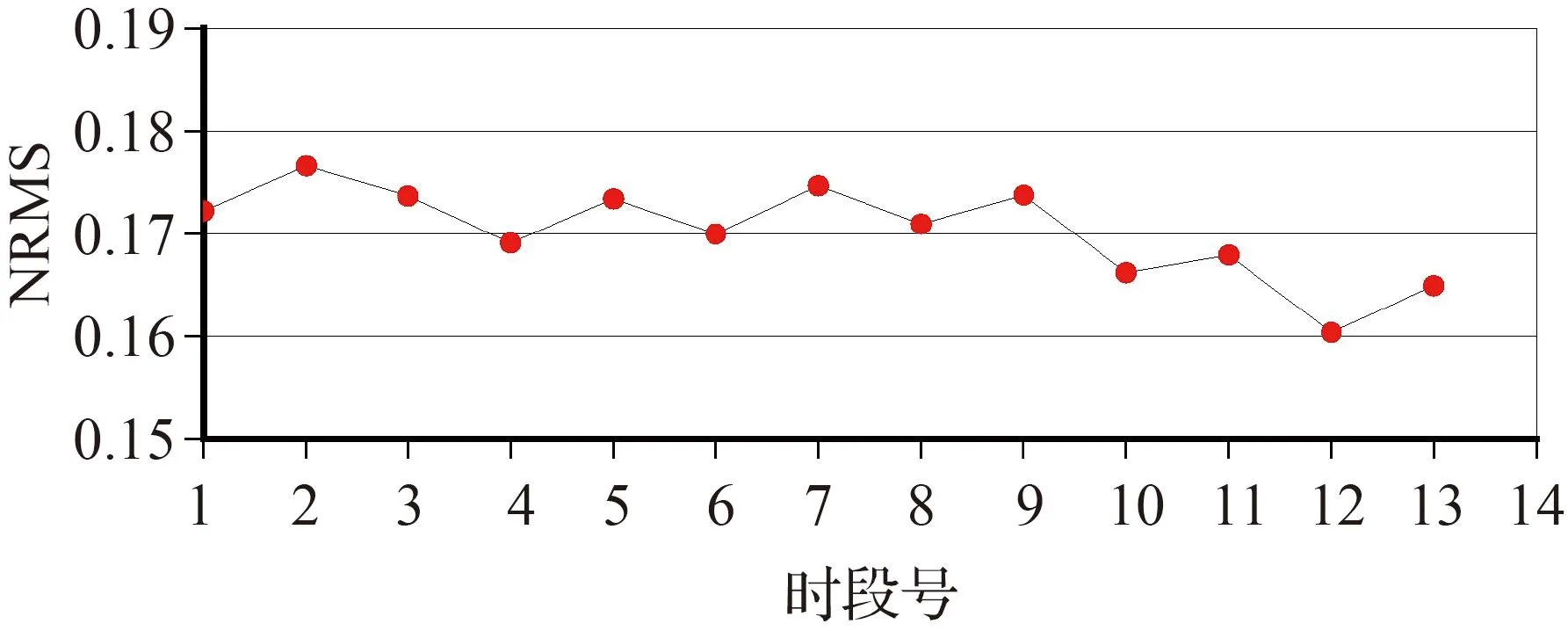
图1 框架网NRMS值分布图

图2 C级网NRMS值分布图
2. 重复基线
各时段解向量的重复性反映了基线解的内部精度,是衡量基线解质量的一个重要指标[7]。其定义为
(1)

σ=a+bl
(2)
式中,σ为各分量的重复性精度指标;a为各分量的固定误差,b为相对误差;l为基线的长度,由各重复基线分量的重复性进行固定误差与比例误差的线性拟合得到。
框架网共有重复基线309条,各条基线的重复性分析如图3和表2所示。由图3和表2可知,框架网所有基线向量的重复性在南北分量(N)的平均值为2.7mm,最大值为8.7mm,95%以上都在6mm以内;在东西分量(E)的平均值为3.5mm,最大值14.9mm,99%的重复性都在12mm以内;高程分量(U)的重复性最差,平均值为7.3mm,最大值16.3mm,97%以上都在12mm以内;基线长度(L)的重复性平均值为3.3mm,最大值14.7mm,99%以上都在12mm以内。
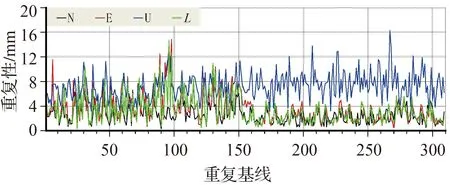
图3 框架网各条基线的重复性

区间NEUL0.0~6.095.5%84.1%30.1%88.3%6.1~12.04.5%14.9%67.3%11.0%12.1~18.00.0%1.0%2.6%0.7%mean/mm2.73.57.33.3max/mm8.714.916.314.7
C级网共有重复基线349条,各条基线的重复性分析如图4和表3所示。由图4和表3可知,C级网所有基线向量的重复性在南北分量的平均值为2.4 mm,最大值为8.2 mm,95%以上的重复性都在6 mm以内;在东西分量的平均值为2.6 mm,最大值14.4 mm,93%以上的重复性都在6 mm以内;高程分量的重复性最差,平均值为9.1 mm,最大值33.0 mm,92%以上的重复性都在18 mm以内;基线长度的重复性平均值为2.4 mm,最大值11.1 mm,93%以上的重复性都在6 mm以内。
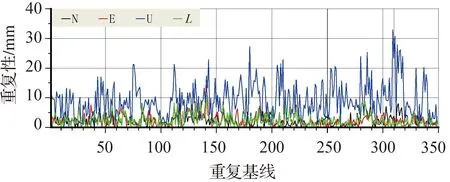
图4 C级网各条基线的重复性
进一步以各条重复基线的重复性为观测值,用线性拟合分别求得框架网和C级网整网重复性的常数部分和与边长成比例的部分,结果见表4。由表4可知,整个框架网的基线重复性在南北分量、东西分量和基线长度上的常数部分均小于2 mm,垂直分量重复性的常数部分最大为7.13 mm。整个C级网的基线重复性,在南北分量、东西分量和基线长度上的常数部分均小于3 mm,垂直分量重复性的常数部分最大,为7.96 mm。由此可知,无论是框架网还是C级网,基线解算精度都较高。

表3 C级网基线重复性的统计信息
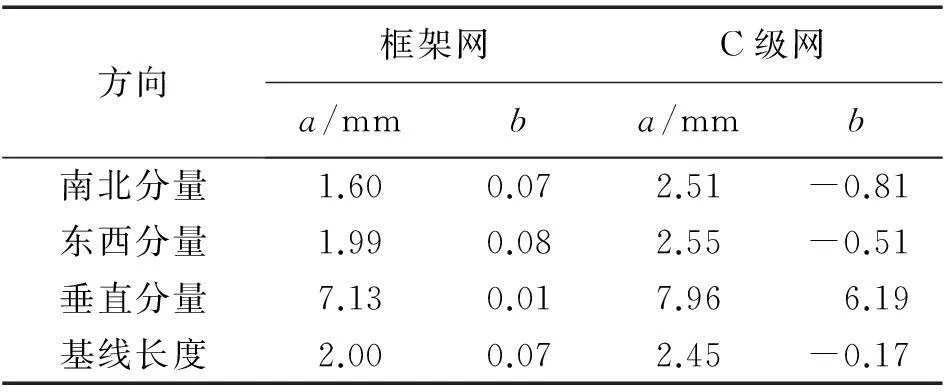
表4 整网基线向量重复性统计表
3. 中误差
框架网共解算得到1812条基线,解算结果的中误差如图5所示。由图5可知,框架网基线解算的中误差在东西分量、南北分量和长度分量上均小于10 mm,高程分量的中误差最大,最大值为16 mm,并且整网的解算精度比较稳定,解算中误差在各分量上未出现较大波动。C级网共解算得到868条基线,解算结果的中误差如图6所示。由图6可知,C级网基线解算的中误差在南北分量和长度分量上均小于5 mm,在东西分量上最大值为10.9 mm,同样在高程分量上解算的中误差最大,最大值为18.8 mm。框架网与C级网相比,单就解算的中误差而言,C级网在南北分量和东西分量上的中误差要小于框架网,这是由于C级网的基线长度要远远小于框架网的基线长度,测站间的空间相关性较强,GAMIT采用双差模式能消除大部分误差。但是在高程分量上,虽然框架网和C级网的解算精度相当,但是C级网解算的中误差波动性较大,解算结果的稳定性没有框架网好,这主要是由于对流层延迟误差造成的,而且对流层延迟误差是影响高程方向解算精度的一个主要因素,虽然C级网的站间距较近,采用双差可以削弱大部分对流层误差的影响,但这必须依赖一个前提条件:同步观测的两测站外部观测环境相近或相似(包括两测站的高程、气象元素等)。实际作业中,很难保证每对同步观测的测站都满足这一前提条件;而如果采用每隔一段时间引入一个对流层参数而加以估计来削弱对流层误差影响的方法,由于C级点观测时间短,引入过多的参数又会降低解算精度,影响解算质量。以上原因导致C级点某些时段解算的不稳定。而框架网的测站是连续跟踪站,每天观测24 h,观测时间长,可以采用每隔2 h估计一个对流层参数的方法,可以很好地削弱对流层延迟误差的影响[8]。

图5 框架网基线解算的中误差
由以上分析可知,在经过精化处理后,控制网和C级网的NRMS值、基线重复性和解算中误差的精度都较高,基线处理精度完全满足技术设计的要求。

图6 C级网基线解算的中误差
四、网平差处理及精度分析
为了获得统一基准下观测点的坐标,将上述获得的基线(包括框架网、C级网)采用GLOBK软件进行整体平差。平差时采用GAMIT软件在基线解算完成后所生成的H-file(包括坐标和坐标之间的全协方差阵)作为观测量,共采用62个固定解。根据设计要求,要平差得到CGCS2000坐标系和GDCORS(广东CORS坐标框架)两套坐标系下的成果。两套坐标系下的平差基准是以在珠海市及周边的4个CORS站(ZHGT/JWGT/DMGT/NLGT,如图7中的五角星)为起算基准,得到其他CORS站和C级点在CGCS2000坐标系和GDCORS坐标系下的坐标。
约束整体平差的目的是将CORS网和C级网重新作整体平差。将CORS网、C级网所有独立基线向量及经调整后的协方差阵作为观测量,平差时应消除因星历和网的传递误差引起的整网在尺度和方向上的系统性偏差。平差之后对整体网的精度进行检验和评估。在CGCS2000坐标系下控制网平差后点位坐标精度统计见表5。由表5可知,控制网的点位精度在X分量的平均中误差为0.001 3 m,Y分量的平均中误差为0.002 8 m,Z分量的平均中误差为0.001 3 m,3个分量的精度都优于0.006 m。在GDCORS坐标系下控制网平差后点位坐标分量精度统计见表6。由表6可知,控制网的点位精度在X分量的平均中误差为0.001 4 m,Y分量的平均中误差为0.002 9 m,Z分量的平均中误差为0.001 4 m,3个分量的精度都优于0.006 m。
为了更好地对平差结果进行分析,本文还对平差后各个点的点位中误差进行了分析,如图7所示(由于涉及保密信息,经纬度信息未在图上标注)。图中4个五角星代表作为平差基准的4个CORS站,横向的误差棒表示各个点位在CGCS2000坐标下平差后的点位中误差,纵向的误差棒表示各个点位在GDCORS坐标系下平差后的点位中误差。从图中可以明显看出,位于珠海市东部和西南角海岛上测站的点位中误差为5~6 mm,要大于位于西部陆地上测站的点位中误差。这主要是由于作为平差基准的4个CORS站全部位于珠海市西部陆地部分,而距离其海岛测站距离较远,不能对其进行很好的控制所致。整体来讲平差精度较高,满足设计要求。
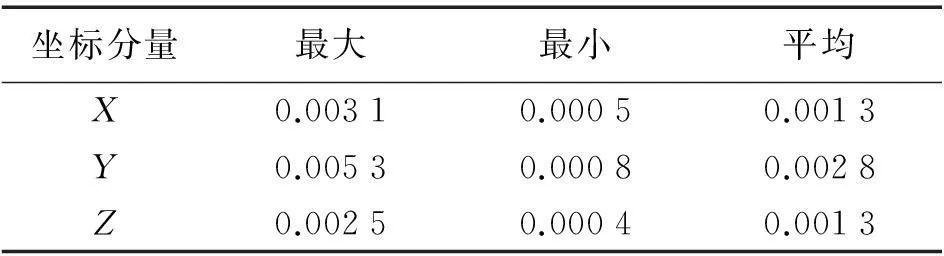
表5 CGCS2000坐标系下平差后XYZ分量中误差统计 m
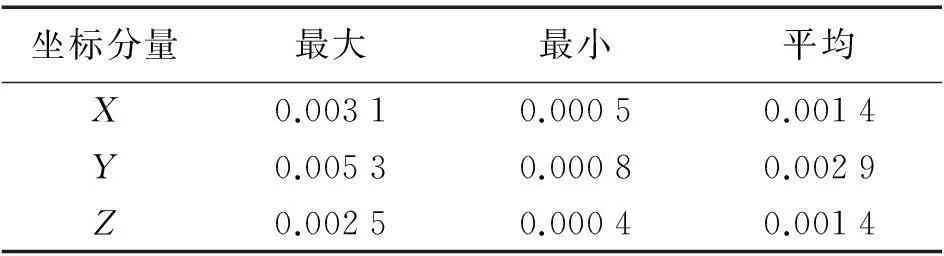
表6 GDCORS坐标系下平差后XYZ分量中误差统计 m
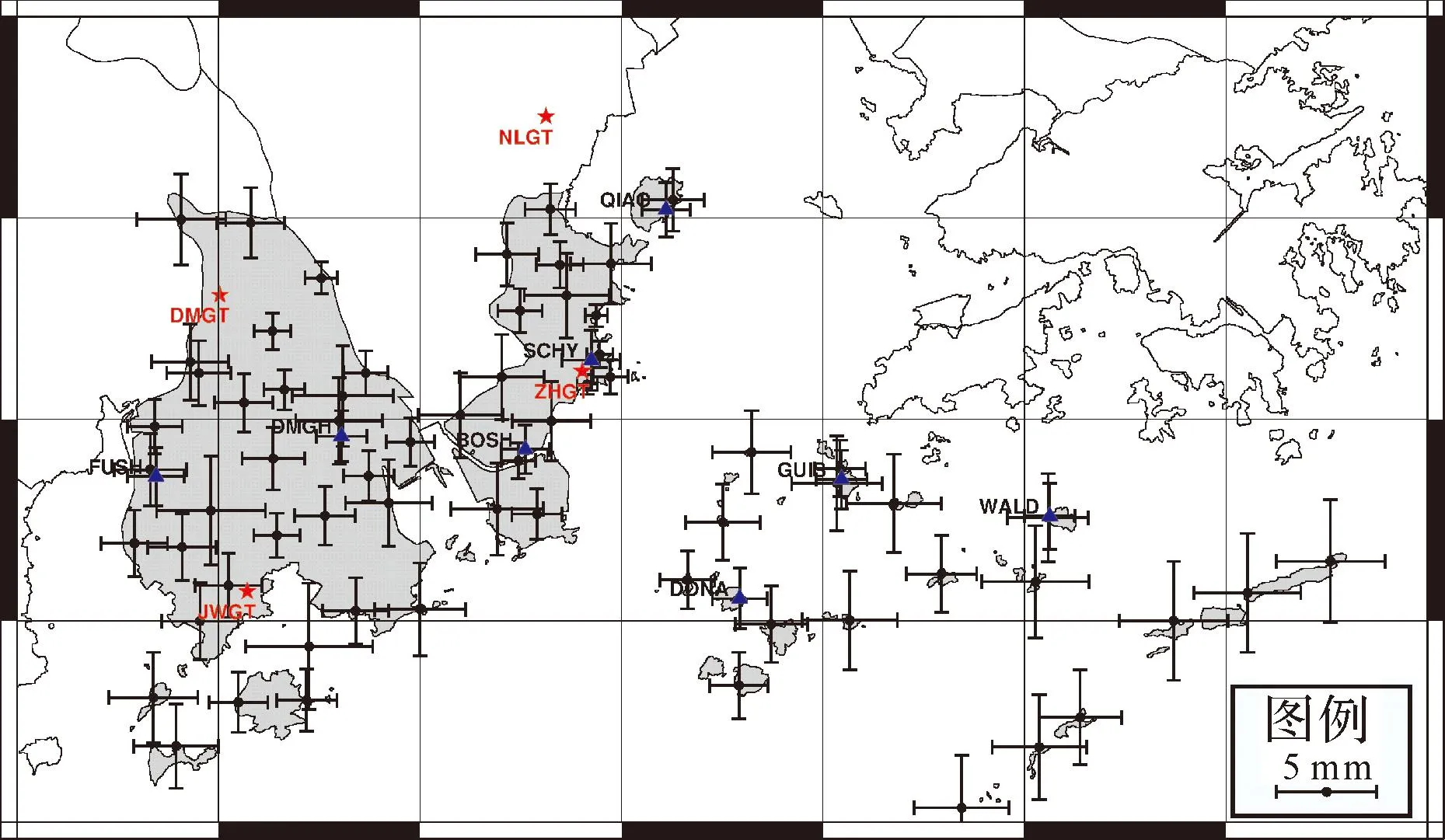
图7 各个测站点位中误差统计分析
五、结束语
本文采用GAMIT/GLOBK软件对位于珠海市的CORS站和C级网的GPS观测数据进行了处理,数据处理模型严密,方法合理。数据处理中,综合了多种精密数据处理技术,并且从多方面对数据处理的质量进行了分析,总结了一套高精度GPS控制网数据处理与精度评估方法,采用该数据处理策略可以获得市级控制网高精度的数据处理结果。高精度的控制点坐标为珠海市基础测绘基准的最终建立提供了科学依据,也为高精度、高分辨率的珠海市陆海统一似大地水准面模型的建立提供了均匀、可靠和精确的数据。
参考文献:
[1]HERRING T A, KING R W, MCCLUSKY S C. GAMIT Reference Manual[EB/OL].[2015-02-03]. www.doc 88.com/P-817688430780.html.
[2]HERRING T A. GLOBK: Global Kalman Filter VLBI and GPS Analysis Program[EB/OL].[2015-02-03]. www.gpsg.mit.edu/simon/gtgk/GLOBK.pdf.
[3]李毓麟, 刘经南. 中国国家 A 级 GPS 网的数据处理和精度评估[J]. 测绘学报, 1996, 25(2): 81-86.
[4]姜卫平, 刘经南. GPS 形变监测网基线处理中系统误差的分析[J]. 武汉大学学报(信息科学版), 2001, 26(3): 196-199.
[5]DIXON T H, GONZALEZ G, LICHTEN S M, et al. First Epoch Geodetic Measurements with the Global Positioning System across the Northern Caribbean Plate Boundary Zone[J]. Journal of Geophysical Research: Solid Earth (1978—2012), 1991, 96(B2): 2397-2415.
[6]郭际明, 周命端, 吴迪军, 等. 高精度 GPS 大型桥梁工程控制网数据处理与质量评估方法研究[J]. 测绘通报, 2012 (2): 18-22.
[7]LIU Jingnan, GE Maorong. Data Analysis of 92 GPS Campaign in China[J]. Journal of Wuhan Technical University of Surveying and Mapping, 1995,20(1):40-45.
[8]邵占英, 刘经南. GPS 精密相对定位中用分段线性法估算对流层折射偏差的影响[J]. 地壳形变与地震, 1998, 18(3): 13-18.
中图分类号:P228.4
文献标识码:B
文章编号:0494-0911(2016)03-0061-05
作者简介:丁建勋(1973—),男,高级工程师,主要从事城市测量新技术应用研究工作。E-mail: djxrr@126.com
收稿日期:2015-03-03
引文格式: 丁建勋,胡冬芽,马德富,等. 珠海市陆海统一高精度GNSS控制网数据处理与精度评估方法研究[J].测绘通报,2016(3):61-65.DOI:10.13474/j.cnki.11-2246.2016.0087.