机器人自动化焊接设备实时监控系统设计
2016-05-04 01:42陈浩,成群林,姜恒等
自动化仪表 2016年4期
机器人自动化焊接设备实时监控系统设计
0引言
随着焊接领域内自动化水平的不断提高,采用工业机器人进行自动化焊接操作已是大势所趋。焊接机器人由于具有通用性强、工作可靠等特点,可以克服传统手工焊接质量不稳定的缺点,从而增加产量、提高质量[1]。
为了方便机器人自动化焊接设备记录焊接过程参数,确保生产过程的实时可控,并可用于后续焊接工艺的优化,本文针对已有的Plasma-MIG复合焊接自动化设备,在研究欧姆龙HostLink通信协议的基础上,以虚拟仪器编程软件LabVIEW为上位机开发平台,设计了一套实时监控系统,以进行焊接过程状态和参数的实时监控。该系统不但确保了焊接参数采集显示的实时性和准确性,而且具有通用性强、方便移植推广等特点。
1总体方案设计
1.1复合焊接系统概述
Plasma-MIG复合焊接自动化设备主要由MOTOMAN焊接机器人、欧姆龙PLC、Fronius TIG焊接电源以及MIG焊接电源等部分组成。其中,PLC作为复合焊接系统的控制核心,直接控制TIG、MIG两台焊接电源的状态和参数;同时,协调焊接机器人和两台焊接电源的运行,接收焊接机器人的操作命令,协调两台焊接电源电弧的起弧时序以及送丝、送气等动作;最终,实现机器人自动化焊接。PLC与焊接电源和机器人的通信依靠现场总线实现。
PLC作为现场总线网络的主站,连接两台焊接电源,通过循环执行其内部程序,将待设焊接参数从存储区传送到焊接电源内置寄存器。由焊机内部专家数据库对参数进行智能化微调之后,输出其实际工作值,PLC将其实时读取并保存至相应存储区。整个工作过程中,PLC存储区和焊机寄存器对应点位的数据一一对应。
1.2监控系统工作原理
对于欧姆龙PLC,上位机与之通信的过程实际是与其通信单元HostLink之间交换命令和响应的过程。上位机可对PLC传送程序指令,控制PLC数据区及其工作情况,PLC对上位机发送的指令代码进行分析,进行相应的操作后,向上位机反馈相应的响应代码[2]。基于此原理,编写上位机软件对下位机PLC的存储区域进行数据的写入与读取操作,即可控制并获取现场焊接设备的状态和参数,实现对焊接系统的实时监控。对于1∶1的上位连接系统,即一台上位机与一台PLC之间的通信,在硬件层面,可通过RS-232串行接口连接PC与PLC。
图1为机器人焊接与监控系统的总体结构示意图。
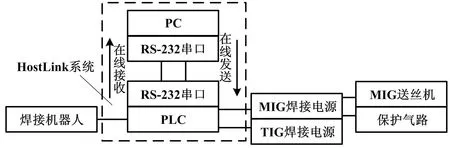
图1 系统总体结构原理图
1.3通信协议格式
在一次交换中,传输的命令格式和应答数据称之为一帧。命令帧通过用户编写的上位机通信程序实现;PLC的HostLink单元根据上位机发来的命令帧自动生成响应帧,并返回给上位机[3]。
欧姆龙PLC与上位机之间的通信依赖于其特有的HostLink通信协议,基于该协议的通信指令分为C-Mode指令和FINS指令两类。C-Mode指令专用于HostLink单元的串行通信,而FINS指令还可用于多种网络通信,其不依赖于固定的硬件传播途径。此外,FINS指令支持PLC内部所有存储区域的外部访问,可实现更为丰富的PLC监控功能。用于串行通信时,FINS指令必须结合HostLink协议实现,即在FINS数据帧前后加上HostLink的指令头、结构校验序列码(FCS)和指令终止符。
完整的通信帧格式如图2所示。
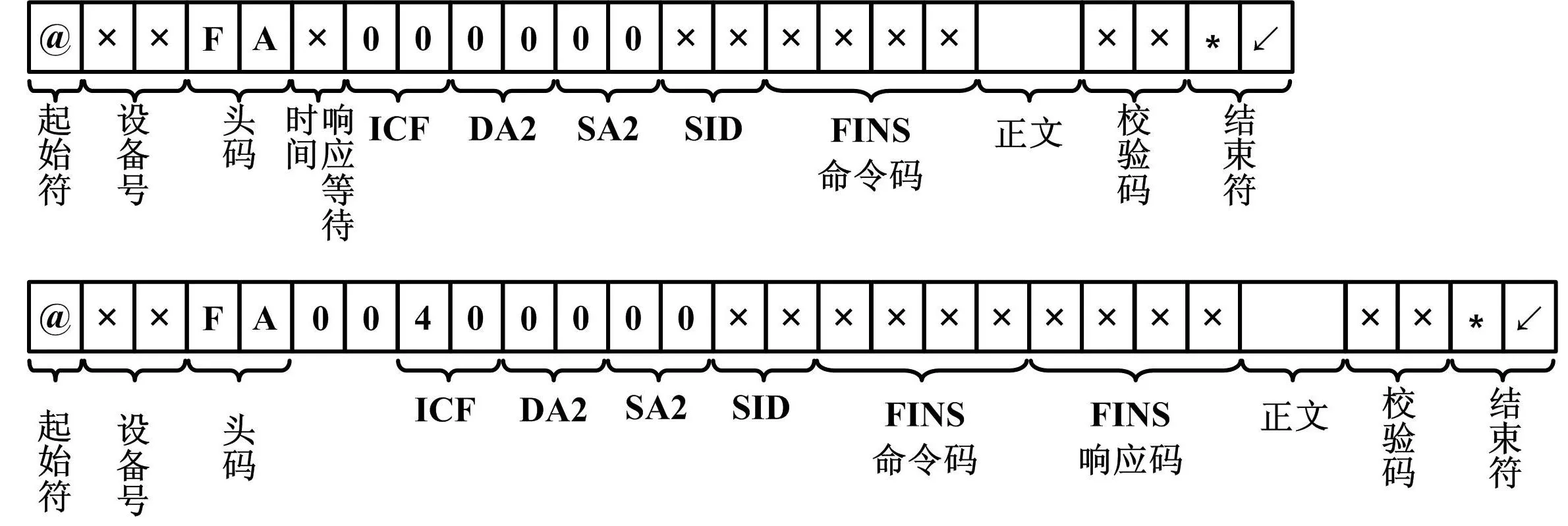
图2 完整的通信帧格式图
帧中部分关键指令代码具体含义说明如下。
FINS命令码:读取和写入操作所对应的固定代码。
正文:具体操作内容,包括读写存储器区域的代码、区域起始地址、数据长度等。
FCS:帧校验序列,用来检查在传送帧数据时是否发生错误。具体算法是从帧数据的开始到帧正文结束(FCS之前),所有数据字符的ASCII码执行异或操作[4-5]。
2LabVIEW程序设计
在LabVIEW中,虚拟仪器软件架构(virtual instrument software architecture,VISA)是应用于仪器编程的标准I/O应用程序接口。其本身并不具有仪器编程能力,而是调用低层驱动器的高层应用程序编程接口(application programming interface,API)。在VISA函数模块中,关于串口通信的VI主要有VISA串口配置、串口读取、串口写入、串口字节数、清空缓存区、串口关闭[6]。
在LabVIEW程序中,HostLink串口通信的一般流程如图3所示。

图3 HostLink串口通信流程图
2.1串口通信程序设计
(1)串口参数配置。
按照实际通信需求,通过VISA串口配置VI初始化串口,设定VISA资源名称,即与PLC通信的上位机串口号、波特率、数据位、校验方式以及停止位等通信参数。
(2)FCS校验码计算。
将待计算字符串转化为由各字符的ASCII码组成的数组序列,通过For循环函数体对数组成员进行异或运算。执行完所有循环后,将运算结果转换为十六进制数表示的字符串,即待求的FCS码。
程序框图如图4所示。
将上述FCS码计算程序编制成“FCS”子VI,其中的“待计算字符串”和“FCS”接口分别设为外部输入和输出端口,供上级VI调用。
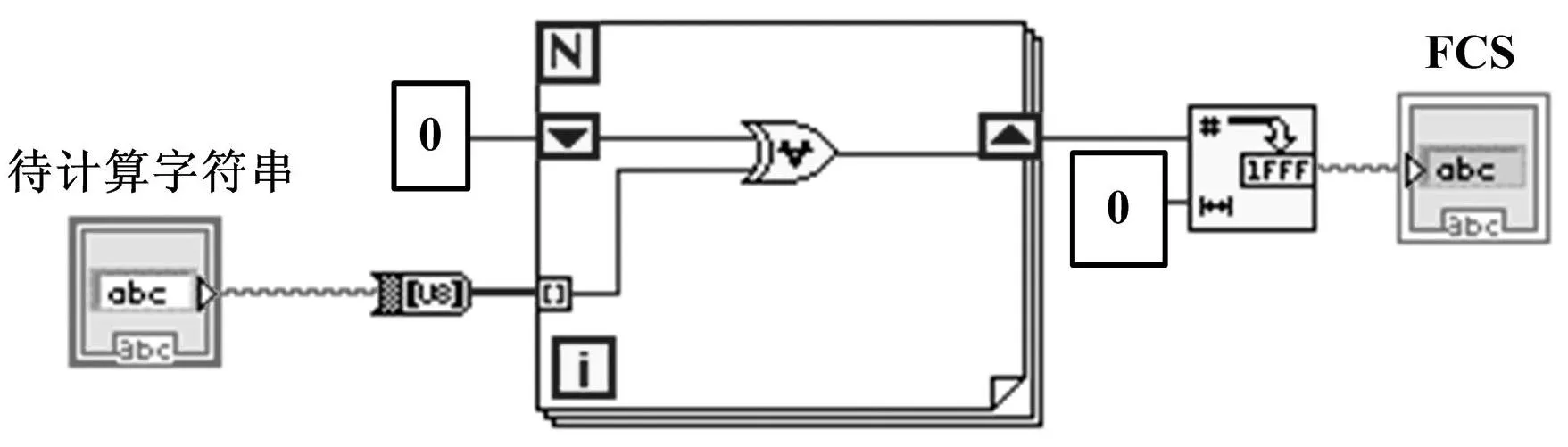
图4 FCS码计算程序框图
(3)数据读取。
欧姆龙PLC的I/O存储区主要存储输入、输出数据和中间变量等,可以通过FINS命令直接访问。通常情况下,上位机需要从PLC中读取的数据也位于I/O存储区中。
当读取PLC的I/O存储区时,在命令帧的正文内容部分,FINS命令码代表读取操作,而存储区域代码和存储区域地址共同指定具体的I/O存储区,数据单元数量指定从起始地址向后偏移的数据区域长度。
数据读取程序框图如图5所示。
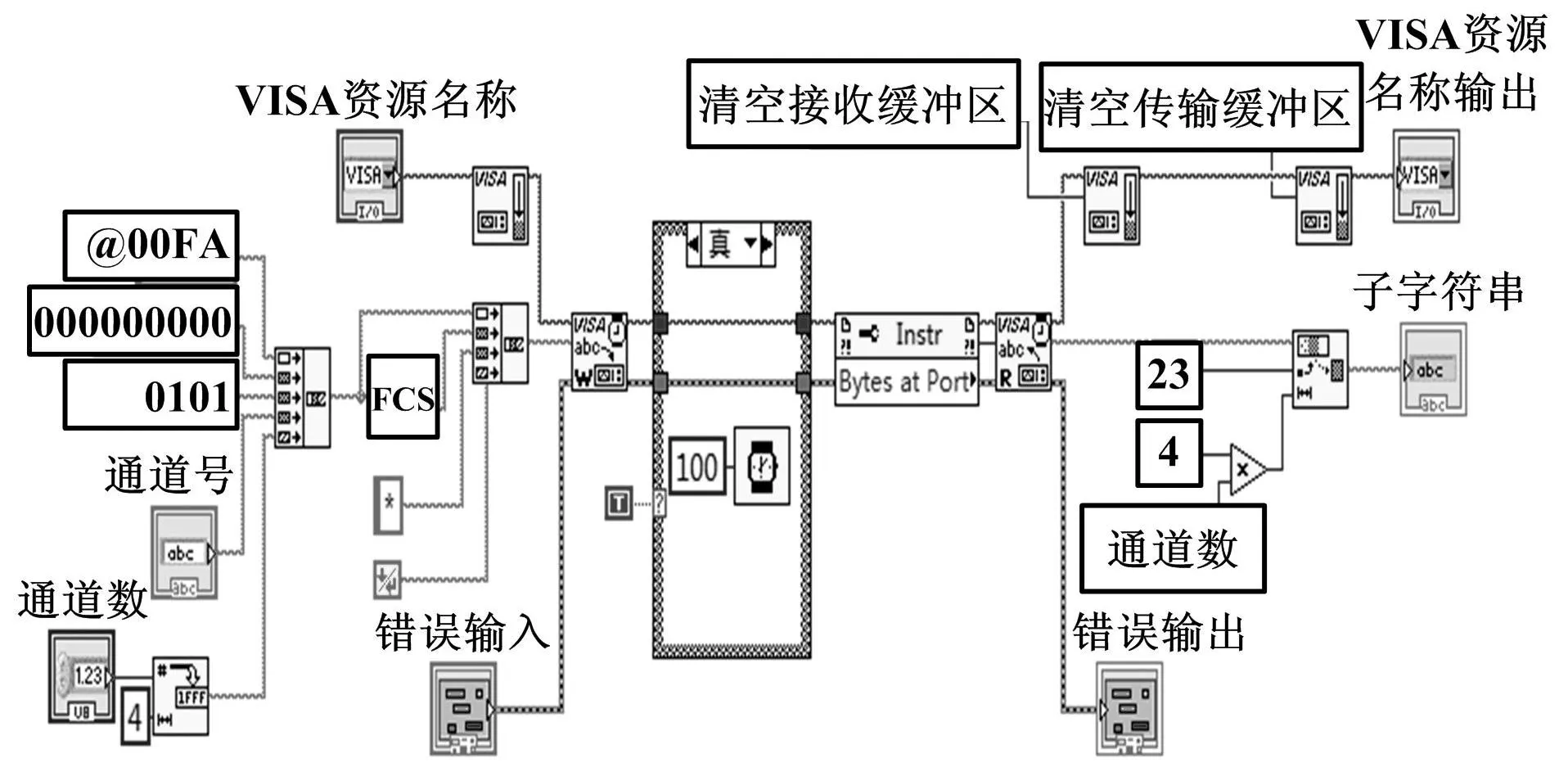
图5 数据读取程序框图
将帧内容组合之后,输入“FCS校验码计算”子VI程序进行计算。最终,由帧内容、校验码和结束码共同构成完整的命令帧:@00FA000000000+通道号+通道数+FCS+*+↙。
通过“VISA写入”函数,将帧命令输入到指定的缓冲区,并通过串行传递方式传送给PLC。在读取响应帧之前设置一定的延时,为数据传递和硬件响应预留时间,以确保数据读写的准确完整。在用“VISA读取”函数读取PLC反馈的响应帧后,从中截取目标数据(包括模拟量数据和开关量数据),供后续处理。
将上述数据读取程序编制成“READ”子VI,供上级VI调用。
(4)数据写入。
将数据写入PLC的I/O存储区时,帧位构成与读取数据操作基本相似。
程序总体与读取数据程序类似,不同之处在于,需将待写入数据转换成符合命令帧格式要求的十六进制数表示的字符,并将存储区域代码设为“字节”模式对应的编号。若成功写入数据,上位机可通过“VISA读取”函数,从串口接收缓冲区中读取到相应包含响应信息的响应帧。
对于以字节为单位的数字量数据,写入程序框图如图6所示。
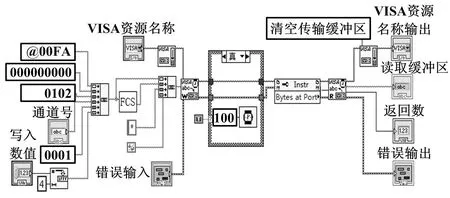
图6 数字量数据写入程序框图
对于以位为单位的开关量(布尔量)数据,则需要将其转化为2位十六进制数表示的字符串,并将存储区域代码设为“位”模式对应的编号。其他与数字量数据写入相同。
将上述模拟量和开关量数据写入程序分别编制成“WRITE(byte)”和“WRITE(bit)”子VI,供上级VI程序调用。
2.2监控系统设计
在完成上位机监控软件串口通信程序各模块设计的基础上,对监控系统总体进行设计。
在对PC主机串口进行初始化配置之后,主程序通过While循环体实现整个系统的持续运行。在While循环体内设置一个事件结构,检测前面板上“开始监控”、“退出系统”控件的动作,并根据相应的控件动作执行不同的事件分支。
在“开始监控”事件分支下,通过While循环体控制监控操作的运行和停止。在顺序结构内,按顺序安排写入和读取数据操作。在写入操作部分,调用数据写入子VI“WRITE(byte)”和“WRITE(bit)”,将前面板中的焊接参数开关量写入到PLC中相应的存储区域,继而传送给焊接电源,以实现对其状态的控制和参数的设定。在读取操作部分,调用数据读取子VI“READ”,读取PLC中采集到的现场焊接设备状态和参数;在对响应帧中数据进行相应的后续计算处理后,将开关状态量和一般参数量传递至前面板中的显示控件,并通过“数据记录文件写入”函数,将系统运行过程中均匀时间点采集到的若干组相应数据保存至设定的文件路径。每一次循环执行完之后,检测前面板中“停止监控”控件的值,以判断是否继续执行该循环体。
在“退出系统”事件分支下,按顺序调用“VISA关闭”和“停止执行VI”函数,实现安全退出监控系统程序的功能。
3系统试验
试验流程如图7所示。
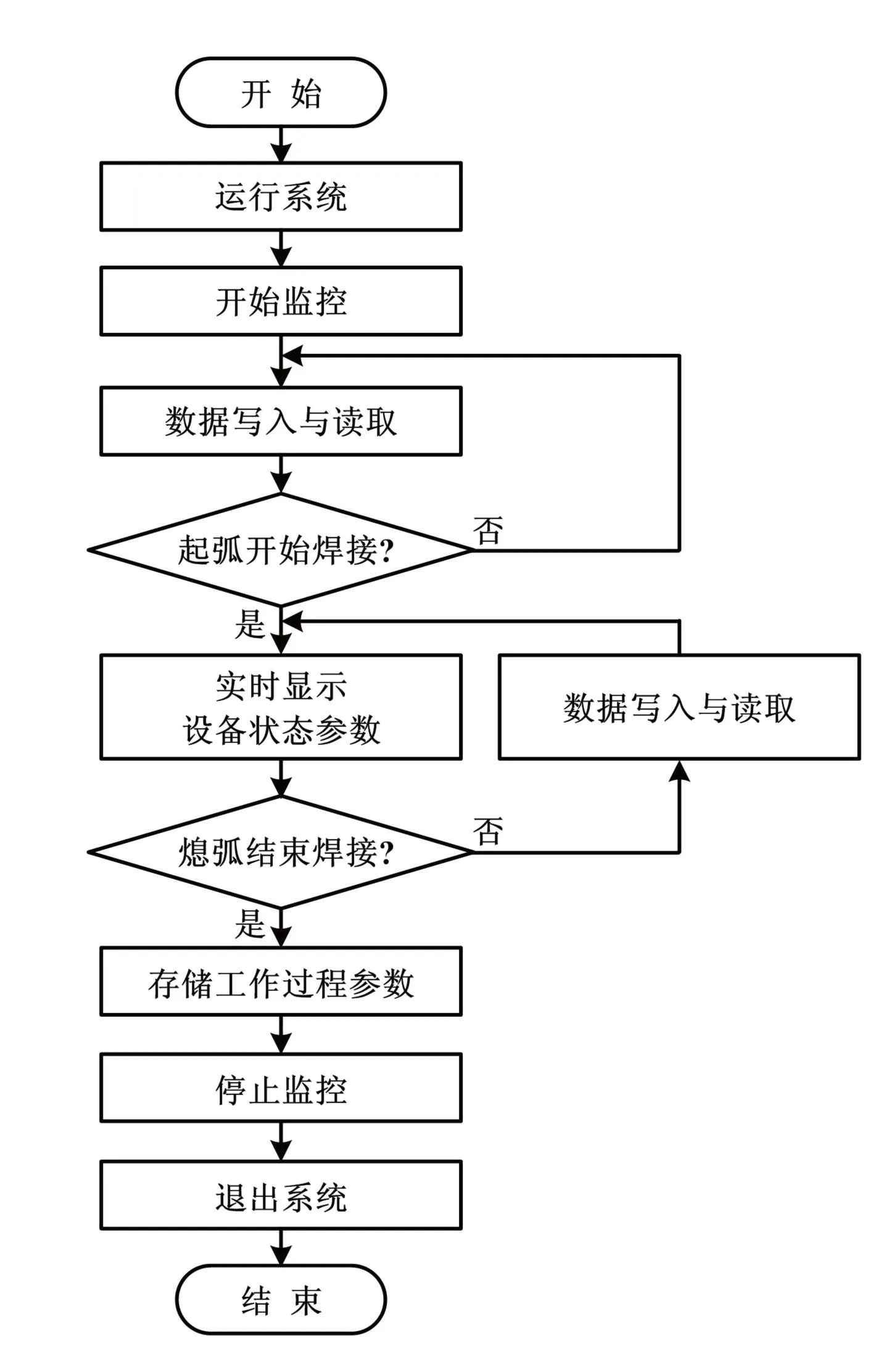
图7 系统试验流程图
设计完成监控系统之后,在LabVIEW前面板中配置相应的串口参数,即可运行该系统程序。开始监控后,在控制区,可对两台焊接电源分别进行消报警操作,并进行手动测气和送丝退丝测试。在状态信息显示区,系统读取焊机的状态开关量,并通过指示灯显示。在参数设定区,输入待设焊接参数,在参数显示区显示其经焊机智能化微调后的实际值;同时,绘制其关于时间的参数曲线,可将参数保存至所设文件路径。试验完成后,停止监控并退出系统。
试验过程中,监控系统获取的复合焊接系统参数大致波形如图8所示。
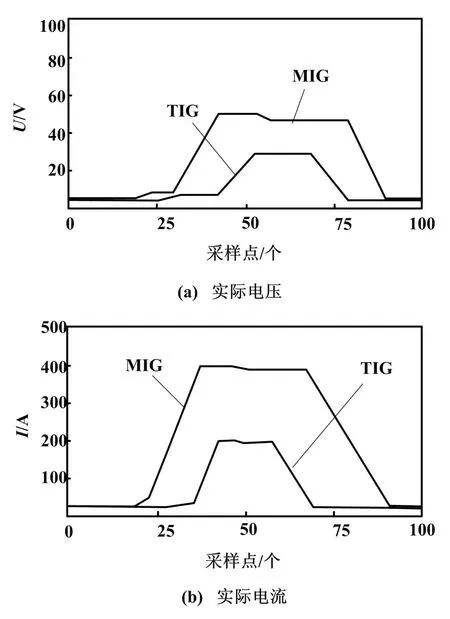
图8 Plasma-MIG复合焊接参数波形示意图
4结束语
对于现场工业设备,以PLC为下位机进行控制并采集现场设备状态和参数,以LabVIEW为上位机开发平台;针对欧姆龙PLC特有的HostLink通信协议,利用LabVIEW软件强大的数据运算和分析能力实现PC主机与PLC之间的RS-232串口通信,以便于对PLC的内存单元进行读写操作;最终,实现对焊接过程的实时监控[7]。
本文以典型的Plasma-MIG复合焊接系统为例,基于PLC与LabVIEW的HostLink串口通信协议,设计了相应的实时监控系统,并在试验中取得了良好的应用效果。该设计方法亦可修改移植到其他上位机平台。整个实时监控系统的设计思想,可应用于工业现场的其他场合。
参考文献
[1] 许燕玲,林涛,陈善本.焊接机器人应用现状与研究发展趋势.金属加工,2010(8):32-36.
[2] 付成波,靳彦.基于HostLink协议的PLC监控软件设计.内蒙古石油化工,2014(7):57-59.
[3] 施光临,刘利.可编程序控制器通信与网络.北京:机械工业出版社,2006:30.
[4] 戴斌,朱建平,袁焱.基于FINS协议的OMRON PLC与上位机以太网通信的实现.电子技术,2009,36(9):13-16.
[5] 徐世许,郑健,孙卫国.基于FINS 协议的Controller Link 网监控系统设计.计算机工程,2007,33(10):95-97.
[6] 侯明,付兴建,吴迎年,等.基于LabVIEW VISA 智能车无线调试系统.园外电子测量技术,2012,31(1):67-70.
[7] 钟绍俊,许素安.可编程控制器与LabVIEW 的通信实现.微计算机信息,2003,19(3):19-20.
Design of the Real-time Monitoring System for Robot Automatic Welding Equipment
陈浩成群林姜恒王学远
(上海航天精密机械研究所,上海201600)
摘要:为了便于机器人自动化焊接设备记录焊接过程参数,设计了一种基于欧姆龙HostLink通信协议和LabVIEW开发平台的实时监控系统。该系统利用PLC采集焊接过程实时数据;通过HostLink通信协议,将数据上传至上位计算机;最终,由上位机监控软件实现数据及曲线的显示、存储等功能。应用结果表明,该系统测量结果准确、操作简单、稳定性好,具有一定的推广价值。
关键词:自动化焊接监控系统 PLCHostLink串口通信现场总线LabVIEW机器人
Abstract:In order to easily record the welding process parameters for robot automatic welding equipment,the real-time monitoring system based on OMRON HostLink communication protocol and LabVIEW development platform is designed.With this system the real time data of welding process are collected by PLC; and then uploaded to host computer via HostLink communication protocol; finally, the functions of display and storage of the real time data and curves are realized by monitoring software in host computer.The application results show that the measurement results of the system are accurate; the system is easy to operate and stable in performance,so the system has some promotional value.
Keywords:AutomaticMeldingMonitoring systemPLCHostLinkSerial port communicationField busLabVIEWRobot
中图分类号:TP274;TH86
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201604013
修改稿收到日期: 2015-08-23。
第一作者陈浩(1991-),男,现为上海航天技术研究院机械电子工程专业在读硕士研究生;主要从事焊接自动化方向的研究。
猜你喜欢
铁道通信信号(2020年6期)2020-09-21
学生天地·初中(2019年3期)2019-04-10
学生天地(2019年7期)2019-04-09
车迷(2018年12期)2018-07-26
创新作文(5-6年级)(2017年5期)2017-12-08
汽车文摘(2017年9期)2017-12-06
中国老区建设(2016年3期)2017-01-15
专用车与零部件(2016年1期)2016-12-10
山东工业技术(2016年15期)2016-12-01
知识窗(2016年11期)2016-11-09