
基于三轴加速度传感器的人体运动识别
2016-04-27 09:20潘敬奎
计算机研究与发展 2016年3期
关键词:主成分分析
李 锋 潘敬奎
(东华大学计算机科学与技术学院 上海 201620)
(lifeng@dhu.edu.cn)
基于三轴加速度传感器的人体运动识别
李锋潘敬奎
(东华大学计算机科学与技术学院上海201620)
(lifeng@dhu.edu.cn)
Human Motion Recognition Based on Triaxial Accelerometer
Li Feng and Pan Jingkui
(CollegeofComputerScienceandTechnology,DonghuaUniversity,Shanghai201620)
AbstractIn this paper, a new method is presented to realize motion detection on a mobile device. The scheme can recognize the people’s motions state according to the acceleration data as long as they simply carry a mobile device with a build-in triaxial accelerometer. The features of the motion signal are extracted in frequency domain and time domain using the method of comprehensive analysis. To enhance the adaptability of the method, the algorithm of independent direction of mobile device algorithm has been applied. The 11 major components, which have greatest contribution to the motion detection, are selected from the 21 motion’s features by principal component analysis, so the input dimension is reduced and the computational complexity of time and space of the algorithm is decreased. Based on the analysis and synthetic comparison of various classification algorithm, the J48 decision tree is accepted. According to the characteristics of the people nature motion, the hidden Markov model is introduced to improve the detection accuracy. Experiments, with different person and different motion, show that the synthesis algorithm has good accuracy and adaptability, and the highest recognition rate achieves 96.13%.
Key wordshuman motion recognition; motion analysis; principal component analysis; hidden Markov model; decision tree
摘要提出并实现一种基于移动设备的用户运动行为的检测算法.在用户随身携带移动设备的情况下,算法就可以根据移动设备中的三轴加速度数据,判别出来用户的行为状态.算法综合分析了加速度传感器数据的时域和频域特性,并通过方向无关性和步幅处理,进一步提高算法的适应性.算法对所抽取21个运动特征值进行了主成分分析,找出了11个主要特征成分,然后使用这些主成分对运行数据进行识别分类.提高了算法准确度,并降低了算法的时间和空间复杂度.在对分类算法综合分析和比较后,J48判决树算法被采纳.算法还根据人类运动的习惯和特性,对特性分类并计算分类的结果,再采用隐式Markov模型进行处理,进一步提高识别的准确度.对多人、多状态数据的实验表明,这种综合方法具有较高的识别准确度和适应性,在对多人多次实际运动数据的处理中,正确识别率可以达到96.13%.
关键词人体运动识别;运动分析;主成分分析;隐Markov模型;判决树
用户的运动环境感知和识别一直是一种充满实用价值的研究,基于运动识别的产品和服务也将会遍及到人们生活的每一个角落.用户运动环境的感知是一个有趣的机器学习范畴,仅仅通过用户运动产生的数据来识别用户运动的状态,并计算出用户的运动量,以后并根据这些信息给用户一些合理的健康的运动建议,这将会是一个充满意义且富有挑战的工作.现在的手机都有很多使用传感器,比如位置传感器(GPS)、方向传感器、加速度传感器、压力传感器、温度传感器等,这将会为我们收集运动数据提供很多方便,为我们以后成果的推广及实现提供一个巨大的平台.
文献[1]中Lee和Mase提出了用5个加速度传感器穿戴在人身体的不同位置来实现人体运动状态的识别,不但用户体验不方便而且识别精度不高.文献[2]中Mizell提出了用重力在预测运动中加速度传感器的方向问题,从而为后来的基于加速度传感器的朝向无关算法提供了理论依据.Yang[3]使用了手机内嵌的加速度传感器识别了6种人体运动状态,并将Markov模型用于识别结果的判别,大大地增加了识别的准确性.但是其所有的处理数据都在时域范围,没有对运动的频域信息进行分析.Yu和Sun等人[4]提出了在视频信号中对人体运动状态的分析,对运动特征采用了主因素分析,并用了神经网络对运动状态进行分类.他们把运动状态最终归纳为了走、跑以及其他3类运动状态.
本文中,我们采用了设备朝向无关的算法[2],这种方法可以利用某段时间内收集的加速度数据来确定移动设备的朝向,根据设备的朝向可以计算出用户运动时候水平方向和垂直方向上的加速度.然后我们在加速度各个方向上的时域和频域[5-6]中共获得21个特征,之后对这些特征进行主成分分析,去掉一些对识别结果作用不明显的特征值.最后把最好的一个模型用于运动识别.为了尽可能减少错误的判别结果,我们后期引用了隐Markov模型(hidden Markov model, HMM)[2,7-8]去处理初步识别结果,这样可以提高机器识别准确度.后期为了让不同的设备能保持很好的识别效果,我们对数据采用了归一化处理,归一化的数据特征值在不同的环境下都能保持相对较高的识别率.
1数据收集及方法
由于人体的运动信号属于低频范畴.当今世界上最快的人(截止到2014年)牙买加鲍威尔创造9.74 s的100 m世界纪录时用了43步.但是为了收集更多的细节信息,我们将加速度传感器的采集频率设为20 Hz,这样足够采集每秒钟小于等于10次的运动.这样也能给我提供更多的运动细节信息,这些信息将有助于我们后面的分析.
本文实验采用的加速度传感器来自普通的智能手机[9-12].在智能手机上我们写了一个只能用来收集手机加速度数据的程序[13-14],这个程序主要是用来存储每50 ms的三轴加速度传感器的加速度值.每隔10 s生成1个样本文件,这个样本文件存储10 s内的数据.因为刚开始我们目前需要用到计算机去分析这些数据,找到最佳的识别方法后[15-16],然后再写程序让手机等嵌入式设备实现检测.
本次实验收集来自于我们实验室其他4人的静止、走、上楼梯、下楼梯、跑和骑车6种动作,默认站立和坐这2种状态为静止.样本数据量达到700.运动状态收集的时候,采用用户手动标记的方法[17].
2数据处理和特征提取
2.1数据处理
如第1节介绍的,为了精确到用户高达10 Hz运动的频率,我们使用三轴加速度传感器采集数据的时候使用了20 Hz的采样频率.图1是对收集来的数据进行了图像化的表示结果.从图1中明显可以看出,数据比较杂乱,不利于分析,尤其当手机朝向发生变化的时候,这时候虽然是同一种状态,但会画出不同的图像.如图1和图2所示,都是2种一样的运动状态,但是画出来的图像相差很大.
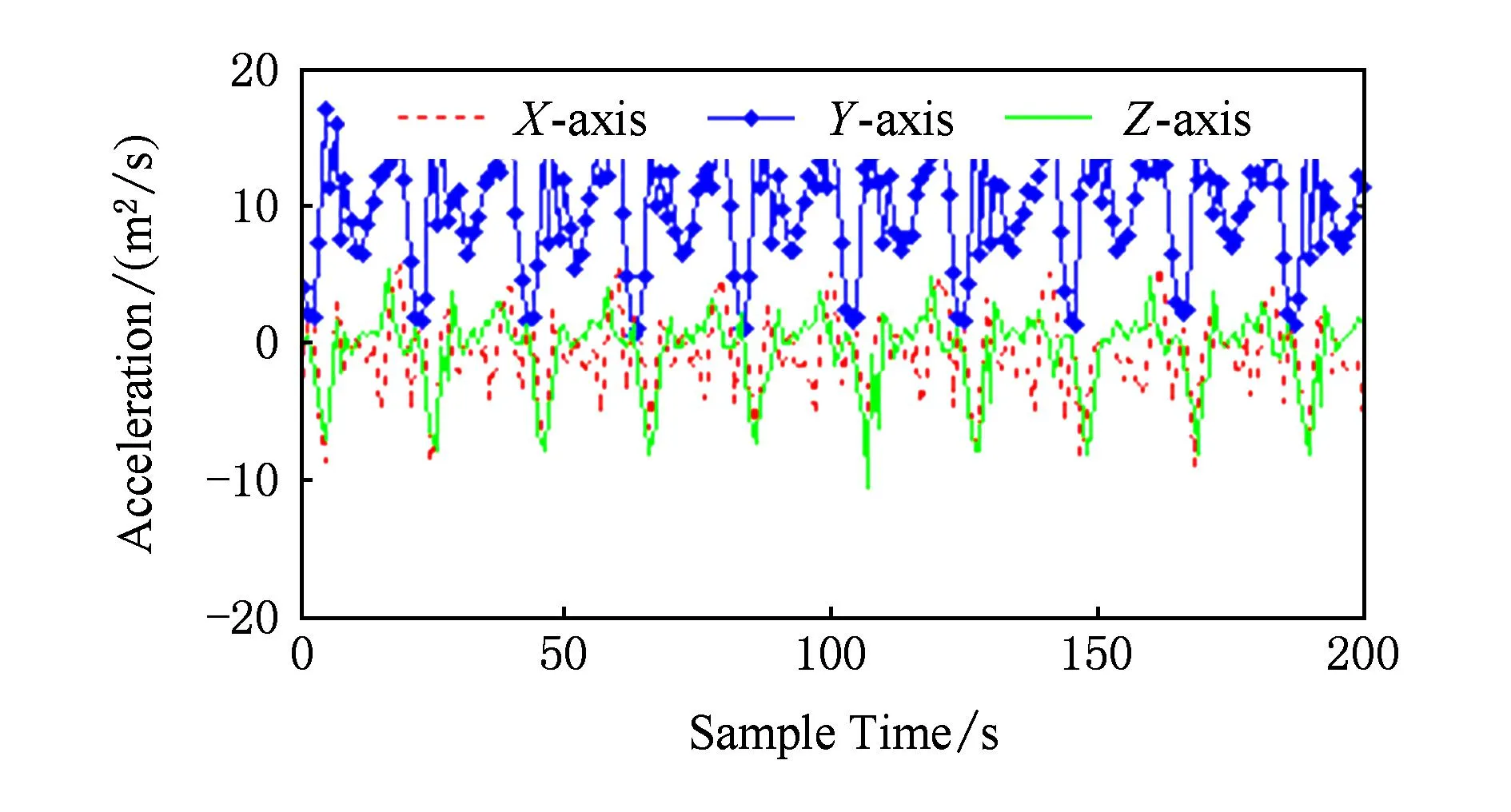
Fig. 1 The raw data of walking.图1 走路状态的原始数据

Fig. 2 The raw data of walking when the orientation of phone changed.图2 手机方向改变走路状态下的原始数据
为了得到更好的、更有利于特征提取的形式,需要对数据进行一次处理.我们采用手机朝向无关的算法,这样就可以获得铅垂面上的加速度(平行于重力方向)和水平面上的加速度(垂直于重力方向),虽然10 s内手机朝向可能发生变化,但是基本上可以视其稳定不变,这样提取出来的数据将会更加有利于我们的分析,其中思路如下:
假设在某一时刻收集的加速度数据为ai=(xi,yi,zi),其中xi,yi,zi分别是加速度X轴,Y轴和Z轴方向上的值,那么我们可以得出来重力方向上的加速度为
g=(mx,my,mz),
其中,

所以,我们可以得到铅垂面上的某一时刻的加速度为
那么平面上某一时刻的加速度是hi=(xi,yi,zi),hi=ai- vi.
获得水平面hi和铅垂面vi上的加速度数据后,我们便可以得到如图3所示的结果.

Fig. 3 The acceleration on vertical and horizontal.图3 处理后保留水平和垂直方向上的数据后的图
下面对这2个分量进行处理,获得相应的特征值:
由于频率成分的叠加不具有幅值叠加的特性,我们在提取频率成分的时候,为了节省计算资源并加快运算速度,可以将X,Y,Z三个轴上的分量求和取模,这时候便可以获得如图4所示的结果:
但是图4中不包含水平和垂直的成分,不能直接用它进行数据分析,不利于提高精确度,需要用到前面求出来的hi和vi.
关于频率的提取,本文采用了快速傅里叶变换[6,18]的方法获得.图5是走路数据进行快速傅里叶变化后的频谱图:
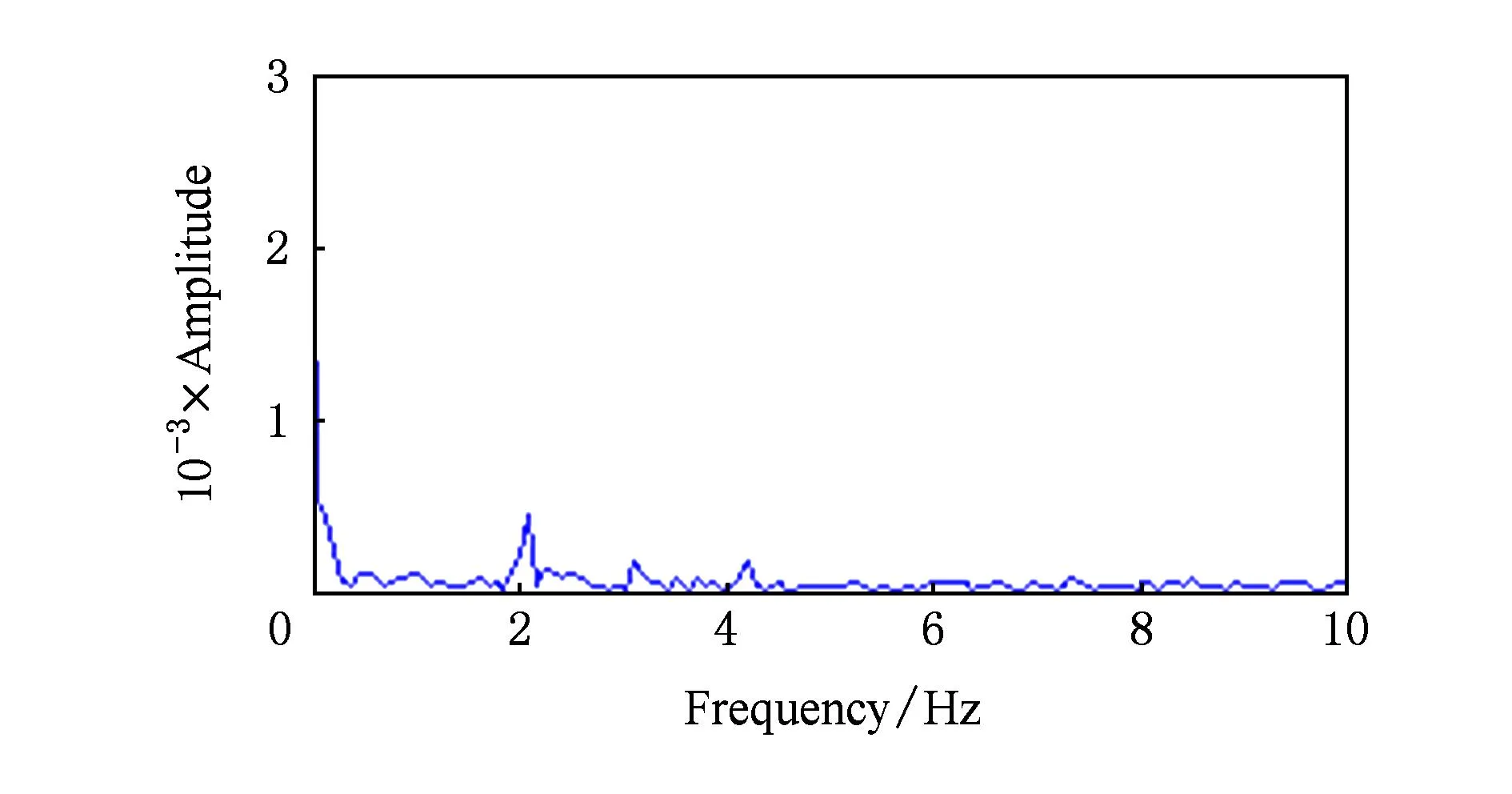
Fig. 5 The frequency spectrogram of walking.图5 走路数据频谱图
为了减弱不同传感器采样数据大小的差异,并减少温度对传感器的影响,避免收集同一种运动状态,却得到不同的数据值.我们采用了归一化的数据处理方法,这样就不需要保留每一个数字的单位,只要一个相对值就可以用于运动识别.实验证明这是可行的.
2.2特征提取
以往人们提取的特征值集合中有最大值、最小值、中位数、平均值、标准差、上四分位数和下四分位数等信息,但是在本文中我们放弃利用上四分位数和下四分位数这个特性,因为求解它们的过程计算量并不低于进行快速傅里叶变换,尤其是它们对数据分析结果贡献上不如傅里叶变换贡献明显.我们也没有利用他们的区间最大值和最小值,因为运动过程中偶尔的抖动会造成区间内最大值和最小值严重失真,这样不利于后期的判断.但是区间最大值和最小值是一个很重要的特性,我们又不能抛弃,所以必须用一个更好的方式既保留最大值和最小值这2个特性,又要最大可能地降低运动中偶尔抖动带来的误差影响,如图6所示.这时候我们需要引入平均最大值和平均最小值的概念.在引入平均最大值的时候,需要用一种算法来获取用户运动的每一步(算法1),然后计算获得用户每一步产生的加速度最大值和最小值.

Fig. 6 The max and min without footstep detection.图6 没有使用脚步识别算法计算的最大点和最小点
算法1. 脚步识别算法.
输入:采样加速度数据y和时间x;
输出:脚步数maxCount、所有脚步中最大的脚步加速度之和tempMax和最小脚步加速度之和tempMin.
①i=1;*初次读入的数据个数为0*
②maxCount=0;*找到最大加速度值已经走的脚步数*
③minCount=0;*找到最小加速度值已经走的脚步数*
④tmpMax=0.0;
⑤tmpMin=0.0;
⑥tMax=0;*脚步最大加速度值的时间位置*
⑦tMin=0;*脚步最小加速度值的时间位置*
⑧sumMax=0.0;*赋值脚步最大值中和为0*
⑨sumMin=0.0;*赋值脚步最小值总和为0*
⑩ 读入新数据y(i)和该数据产生的时刻x(i);




































对我们取样区间内(10 s)的每一步的最大值和最小值求出来后取平均:

这样可以消除偶尔抖动对区间的最大值和最小值的影响,获得平均最大值和平均最小值将会更加反映真实的运行情况,如图7和表1所示.
经过以上的理论分析,我们将获得以下特性集合:
垂直特性——平均最大值、平均最小值、平均值、方差.
水平特性——平均最大值、平均最小值、平均值、方差.
矢量和特性——平均最大值、平均最小值、平均值、方差.
频率特性——第1~6个最大能量点的频域位置.
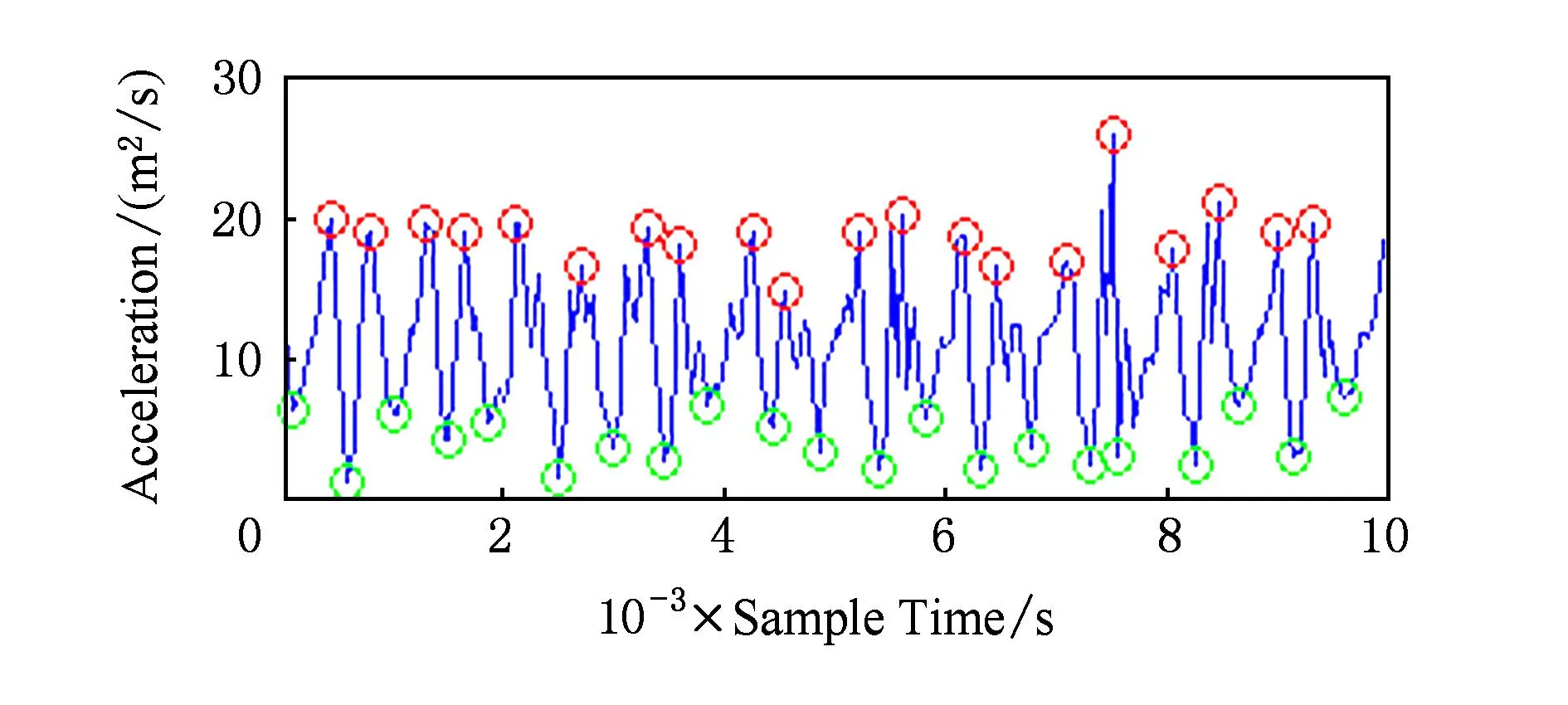
Fig. 7 The max and min on each of footsteps.图7 每一步的最大点和最小点
m2s
m2s
FootstepDetectionMaxAccelerationMinAccelerationWithout26.030.94With18.023.70
3运动数据的初步处理和分析
本次实验数据采集自4个人的不同运动状态.采集数据之时,需要将安装了采集软件的手机放在用户裤子的口袋中.我们收集了大约700种样本,包括了6种运动状态,这6种运动状态分别为:走、跑、上楼梯、下楼梯、骑车和静止,每一个动作的数据量如表2所示:
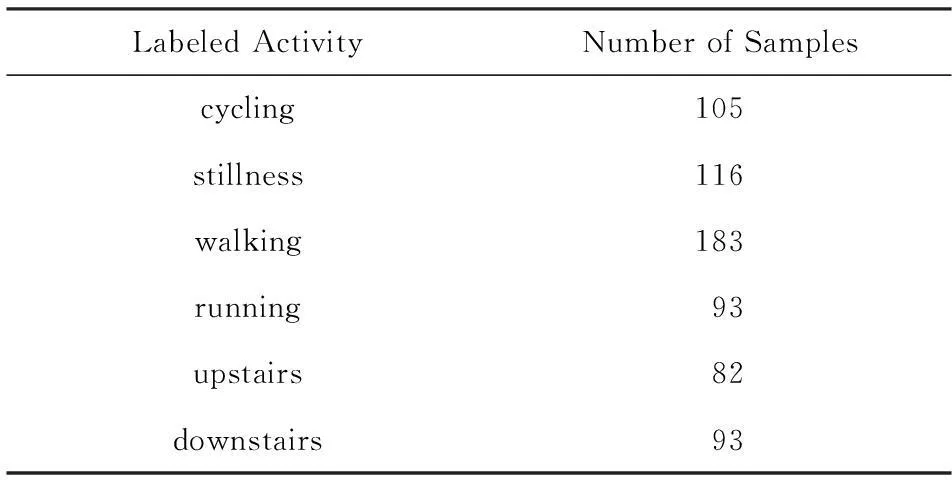
Table 2 Accelerometer Samples Data Set
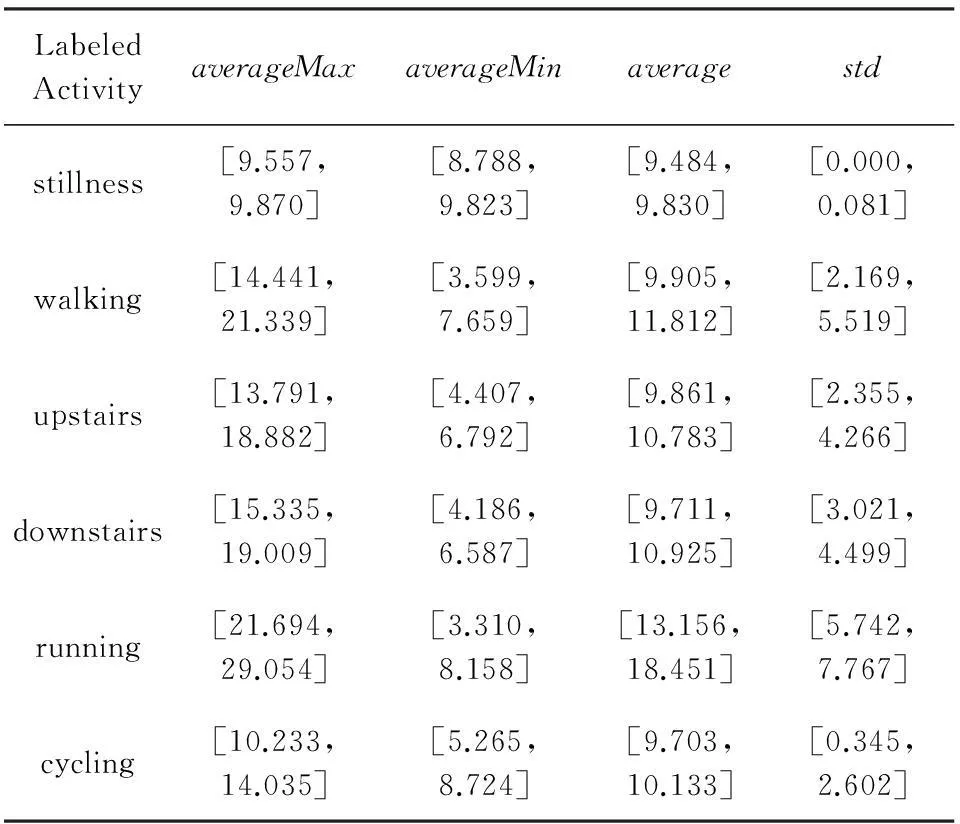
使用我们之前要提取的特征量,现在开始对每一种运动进行可视化分析.图8是6种运动的曲线图.从0~200 s是静止的运动状态,200~400 s是走路的状态,400~600 s是上楼梯运动状态,600~800 s是下楼梯的状态,从800~1 000 s是跑步的状态,最后,从1 000~1 200 s是骑车的状态.从图8可以很轻松分辨跑步、骑车和静止这3个运动,但是我们很难分辨出上楼梯、下楼梯和走.因为它们运动产生的图像非常相似,甚至是相同.但是我们能不能通过统计的其他方法来获得他们之间的区别呢?于是我们统计出这3个运动的平均最大值、平均最小值、平均值以及方差.计算结果如表3所示.

Fig. 8 The acceleration of six motions.图8 6种运动状态的加速度度值
m2s
m2s
LabeledActivityaverageMaxaverageMinaveragestdstillness[9.557,9.870][8.788,9.823][9.484,9.830][0.000,0.081]walking[14.441,21.339][3.599,7.659][9.905,11.812][2.169,5.519]upstairs[13.791,18.882][4.407,6.792][9.861,10.783][2.355,4.266]downstairs[15.335,19.009][4.186,6.587][9.711,10.925][3.021,4.499]running[21.694,29.054][3.310,8.158][13.156,18.451][5.742,7.767]cycling[10.233,14.035][5.265,8.724][9.703,10.133][0.345,2.602]
从表3中,我们还是不能找到一种简单又很有效的方法去识别所有的动作.如果只使用这些特征量,仍然不能分辨出上楼梯、下楼梯和走3个相似的运动.这时候我们需要用到频域的一些特性.先对每一个运动进行FFT变换[6-7],然后获得频域信息,如图9~13所示.
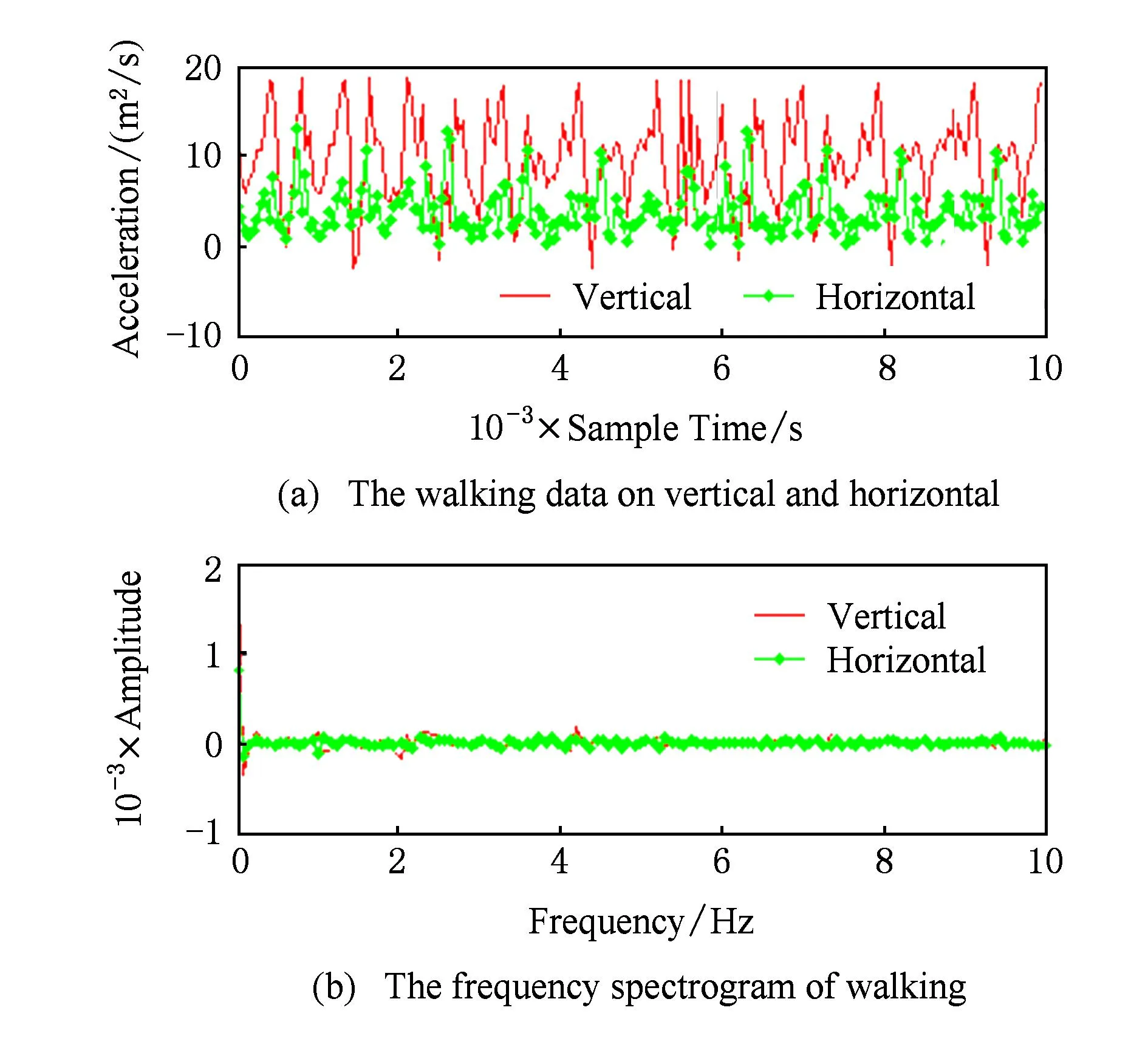
Fig. 9 The time domain and frequency domain of walking.图9 走路的时域和频域图
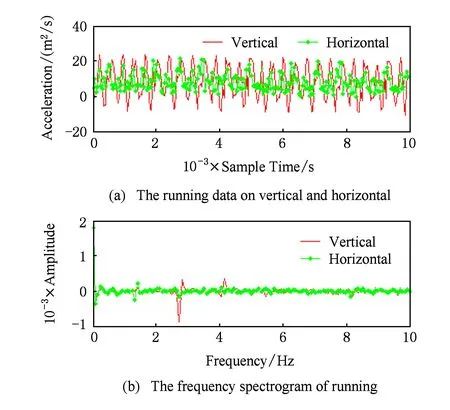
Fig. 10 The time domain and frequency domain of running.图10 跑步的时域和频域图
通过获得的时域和频域的信息,我们发现跑步和静止2种状态是最容易识别的.因为跑步产生的加速度数据的方差是最大的,而且它的平均最大值也是最大的.静止状态的方差和加速度的平均最大值是所有状态中最小的,我们可以使用简单的逻辑判断就可以识别.骑车的状态也比较容易判别,它的加速度平均值和静止状态基本相同,但是它的平均最大值比静止状态的平均最大值要大,而且加速度的平均最小值要比静止状态的平均最小值要小.这6种状态中只有走,上楼梯和下楼梯3种状态最相似.但是仔细观察后,也发现下楼梯产生的数据方差是三者中最大的,上楼梯是最小的.这是因为上楼梯过程人体有克服加速度做功的过程,所以晃动不是很厉害,下楼梯就相对轻松很多,于是人体的抖动就比较大.在加速度平均最小值上,上楼梯的加速度平均最小值要大于下楼梯的加速度的平均最小值.在加速度的平均最大值上,下楼梯要大于上楼梯,走的状态居中.

Fig. 11 The time domain and frequency domain of upstairs.图11 上楼梯的时域和频域图

Fig. 12 The time domain and frequency domain of downstairs.图12 下楼梯的时域和频域图
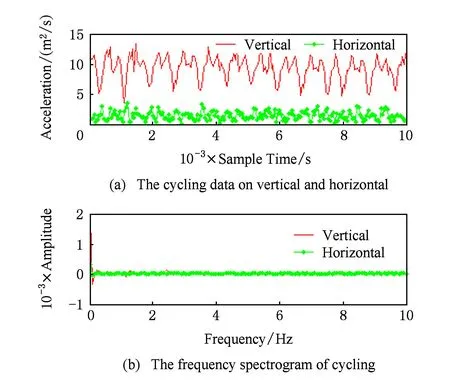
Fig. 13 The time domain and frequency domain of cycling.图13 骑车的时域和频域图
4主成分分析
第3节我们对所有的数据进行了笼统的定性分析.但是不能直接用于实际运动的判别和分类.此时将介绍如何从21个特征值中找出对结果贡献最大的主成分,然后将利用这些主成分对数据进行分类,这将有利于减少分类的计算量.
设目标函数Y由p=21个因素x1,x2,…,xp的函数,令每一个xk(k=1,2,…,p)有n=672个数据.将数据进行标准化处理以后,写成矩阵形式:
求出矩阵X的协方差矩阵R=XXT,然后求出|R-λE|=0的p个特征根,并按大小排序成:
在求出每个特征根所对应的特征向量,特征向量矩阵C为
C为单位正交阵,既满足CCT=CTC=E,C-1=CT.
各因素的线性组合y=cx,其中:
x=(x1x2x3…xp)T,
y=(y1y2y3…yp)T,
即

为了使识别程度大于99.18%,我们可以计算出m=11,即前m=11个主成分分别为主成分.此时我们可以得出m个主成分对应的特征向量矩阵Cm的转置矩阵:
m个主成分构成m维正交坐标系,由x1=c11y+c21y2+…+cm1ym可以求出来x1轴与主成分轴y1,y2,y3,…,yp方向余弦依次为
它们依次表示x1与主成分轴y1,y2,…,ym相关程度的大小,由此可以看作是x1分别在y1,y2,…,ym轴上的比重.

可以看作是x1通过主成分y1,y2,…,ym对总目标函数Y的负荷率,又因为Y轴是正交的,所以各负荷率可以直接相加,故:
可以看成x1对目标函数Y的负荷率,同理:
可以看成xk对目标函数Y的负荷率,其中k=1,2,…,p.我们可以得到表4的结果:
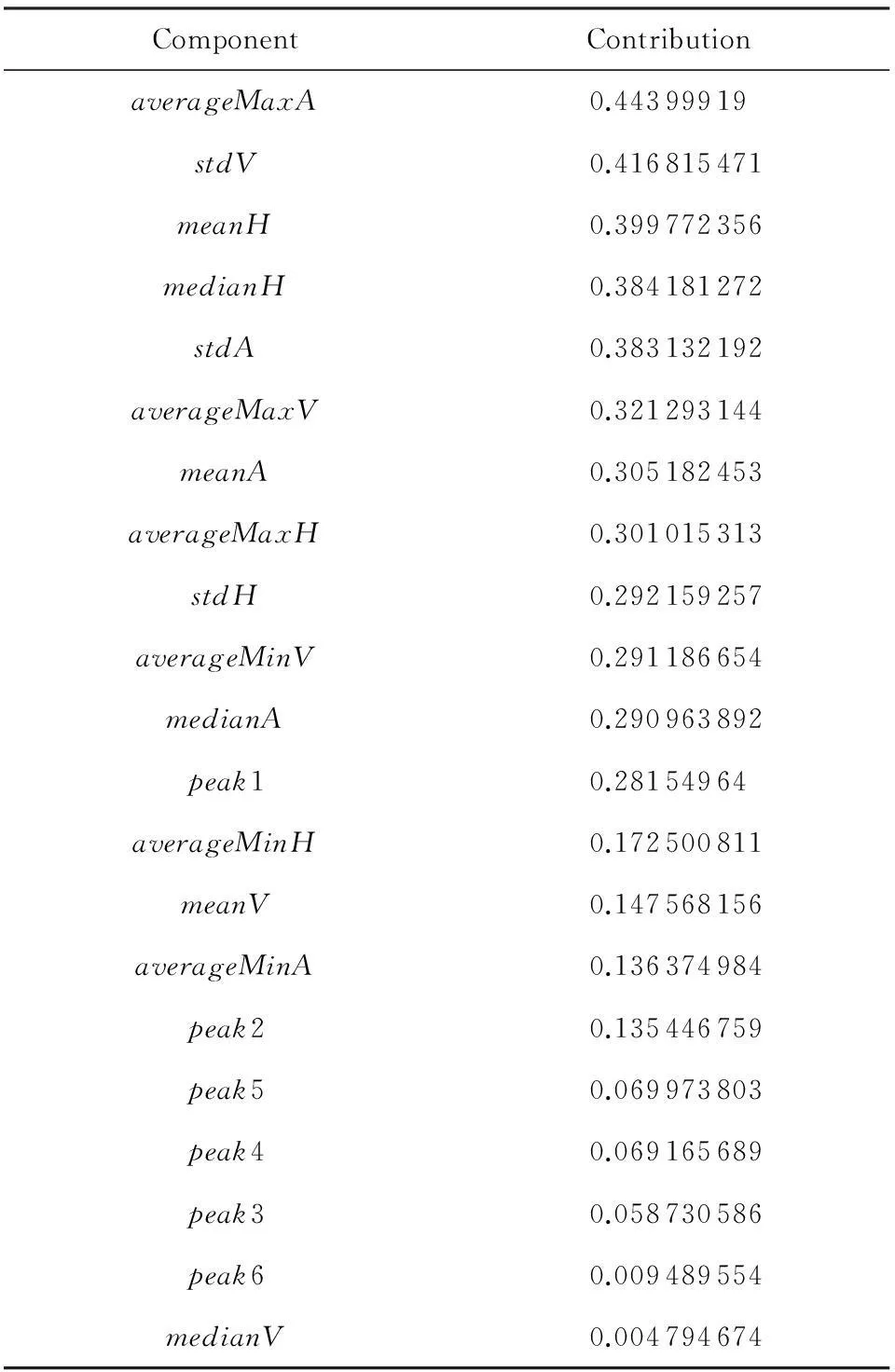
Table 4 Contribution of Each Component

5数据分类和分类模型比较
从第4节我们已经获得了用于运动识别的主要特征值,根据这些特征值,我们将对样本数据进行分类和判别,然后找到合适的阈值对这些运动状态进行判别,并找到一种合适的判别模型来高速处理这些数据.我们初期选取的模型有朴素贝叶斯模型(naive Bayes)、贝叶斯网络模型(Bayesian networks)、判决树(J48)、NB Tree(naive Bayes tree)、LWL(locally weighted learning)和Logistic.然后我们对每一个模型行了性能的评估和测试以便让我们找到优秀的判别模型.
从表5的计算结果我们可以发现,识别率最高的模型是J48模型,然后是贝叶斯网络和Logistic.NB Tree同样也是一个识别度比较高的算法,但是LWL效果是最不好的一种模型.从识别准确度和节省计算资源出发,所以我们准备对J48、贝叶斯网络和Logistic三种模型进行研究.希望在它们之中找到合适的模型用于运动识别.下面是这3个模型产生的混合矩阵,如表6~8所示.
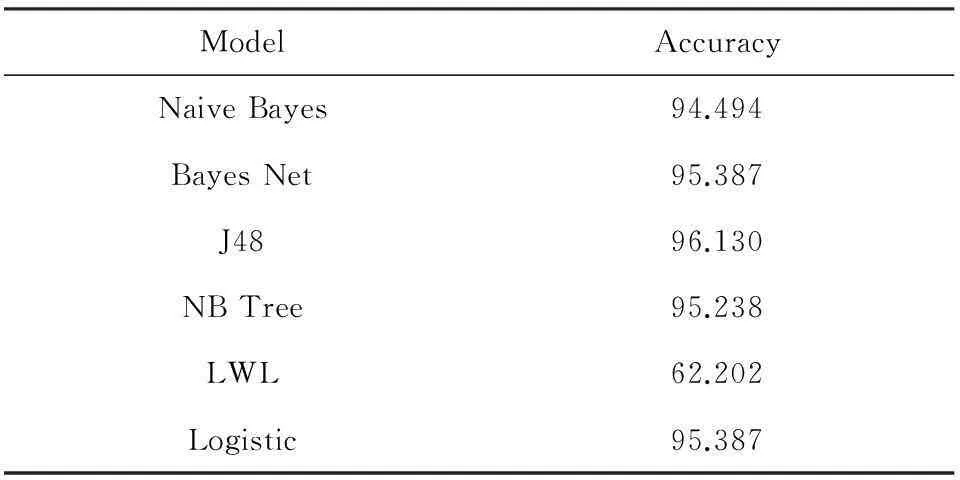
Table 5 The Recognition Accuracy of Each Model
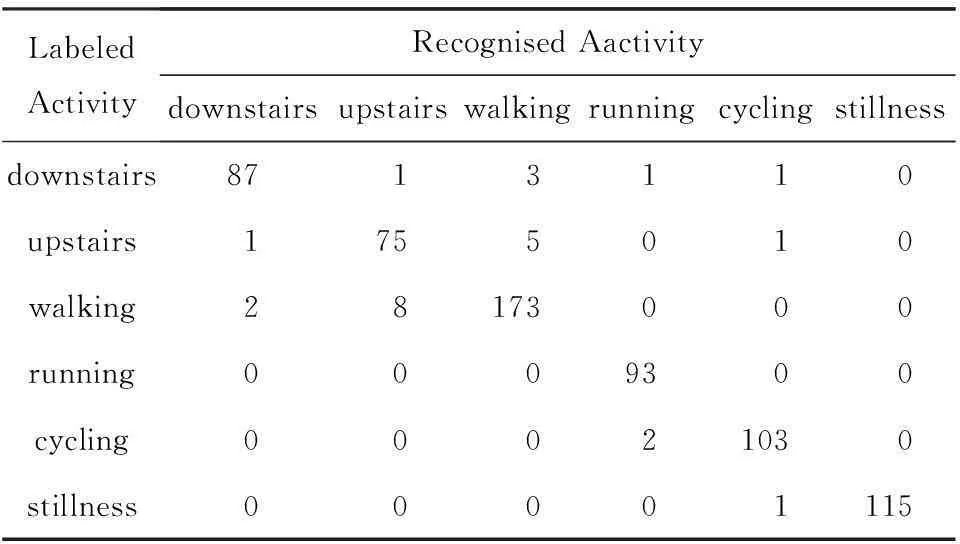
Table 6 Confusion Matrix for J48 Classifier

Table 7 Confusion Matrix for BayesNet Classifier
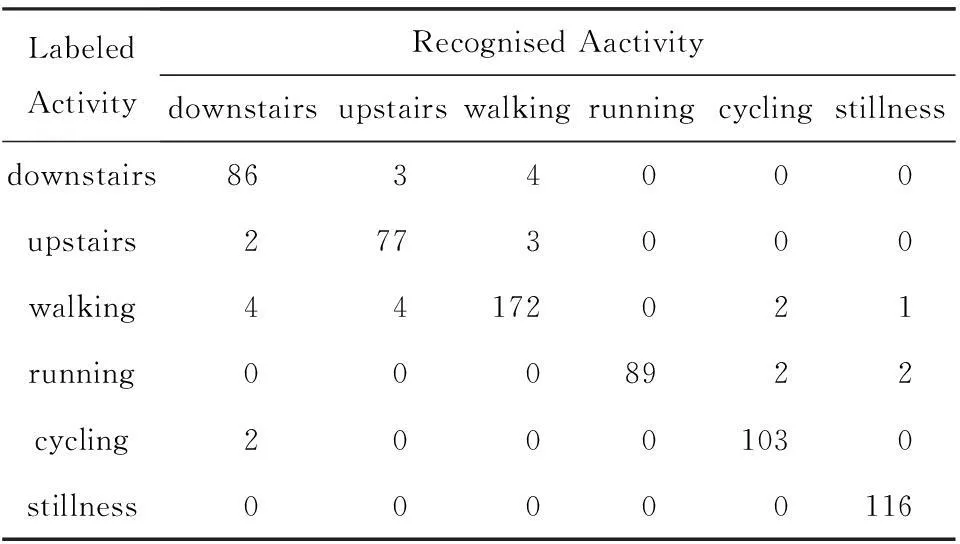
Table 8 Confusion Matrix for Logistic Classifier
从表6~8的数据我们可以发现每个模型识别准确程度最好的都是跑步、骑车和静止3个运动的识别,尤其是贝叶斯网络基本完全识别出来了这3个运动,但是对上楼梯、下楼梯和走这个3个运动的识别是都存在误差的.综合识别的准确度和减少计算资源,我们最后采用的是J48判决树.因为这个方法相对来说识别精度和速度都比较快.但是J48也有不足,比如下楼梯运动由于用户个体之间的运动差异,造成某些主特征值过大,有一些人状态被识别成跑,竟然有一个被识别为骑车,这是一个可笑的事情.所以需要用到另一种方法去减少这种低级的错误.这时候我们引入使用Markov模型,因为用户运动的过程可以看作一种Markov过程,所有动作的下一个动作基本都是一个可以预测的.比如一个在上楼梯状态的时候,下一个动作状态很可能是继续上楼梯或者走,只有很小的可能是跑或者骑车.所以,我们可以根据每一个用户的日常行为规律来建立一个状态转移矩阵P.然后用HMM模型去平滑输出,过滤掉不合理的情况.这样就可以明显增加用户运动的准确度.
P=
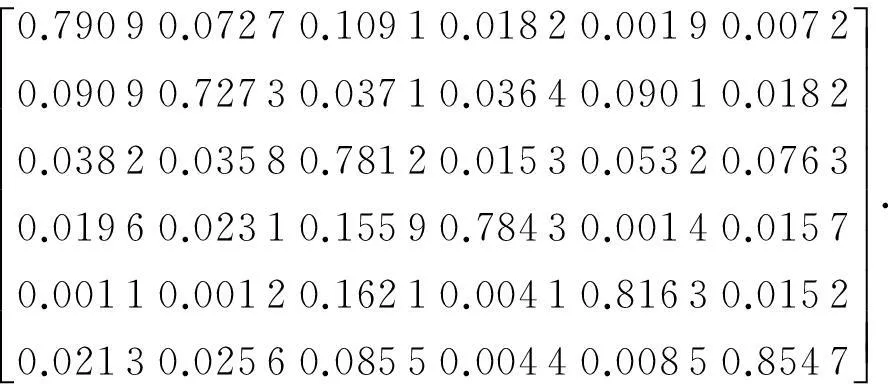
矩阵P是我们对一个实验者一周的数据分析得到的,如果一个人现在的动作状态是q,上一个动作状态是r,q,r∈A={上楼梯,下楼梯,跑,走,骑车,静止},那么此时的转移系数是p{si=m|si-1=n}.在后期的训练中,我们可以得到,每个用户的状态转移矩阵不同,因为每个人的生活习惯也不同.有些人可能没有自行车,可能由其他运动状态向骑车运动状态的转移系数将会变成0.所以后期的状态转移矩阵应该是建立在本地的一个可以帮助提高用户状态识别结果的局部数据.
6总结和展望
在本文中,我们用手机内置的加速度传感器收集用户运动产生的样本数据,然后对样本数据进行一系列的时域和频域特征值,然后利用主因素分析方法找到最重要的特征值.利用这些特征值计算出来一个合适的识别模型,利用这个模型根据用户现有的实时数据推断用户的现在行为状态,并可以对用户历史行为进行统计分析.
在数据处理过程中,我们首先对数据进行脚步定位和特征量抽取.并利用手机朝向无关的算法,求出水平和垂直方向上各自的加速度.在求取最大值和最小值的算法上,我们抛弃了以前人们采用的整个区间数据的最大值和最小值的方法,而是采用以用户脚步为单位的的平均最大值和平均最小值.我们又将处理领域拓展到频域范围,然后我们获得最大的6个频域点,这些点包含运动产生的非常重要的频率信息.我们又用了主成分分析,获得了对结果贡献最大的几个主要特征属性.然后讨论了如何利用这些特征点和样本去训练一个识别模型.为了增加识别的精确程度我们又采用了隐Markov过程.
本文研究可以直接应用于移动领域的用户的运动识别.通过获得用户准确的运动信息,给用户一个健康的生活提示和健康守护.配合我们另一个项目的心电检测,可以随时获得家中老人的运动状态,防止他们出现跌倒、昏迷等意外.
在将来我们将会缩短识别时间和取样周期,增加系统的反应时间,提供一个更灵敏的算法和服务.其次,我们希望能够拓展识别的领域,让手机可以实现无监督的自主学习,并归纳出用户独特的行为,这样可以更加灵活方便以及精确地为每一个用户服务,减少识别的误差.
参考文献
[1]Lee S W, Mase K. Activity and location recognition using wearable sensors[J]. IEEE Pervasive Computing, 2002, 1(3): 24-32
[2]Mizell D. Using gravity to estimate accelerometer orientation[C]Proc of the 7th IEEE Int Symp on Wearable Computers. Los Alamitos, CA: IEEE Computer Society, 2003: 252-252
[3]Yang Jun. Toward physical activity diary: Motion recognition using simple acceleration features with mobile phones[C]Proc of the 1st Int Interactive Multimedia for Consumer Electronics. New York: ACM, 2009: 1-10
[4]Yu H, Sun G, Song W, et al. Human motion recognition based on neural network[C]Proc of 2005 Int Conf on Communications, Circuits and Systems. Piscataway, NJ: IEEE, 2005: 27-30
[5]Welch P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms[J]. IEEE Trans on Audio Electroacoustics, 1967, 15(2): 70-73
[6]Gao Xiquan, Ding Yumei. Digital Signal Processing[M]. Xi’an: Xidian University Press, 2008: 75-125 (in Chinese)(高西全, 丁玉美. 数字信号处理[M]. 西安: 西安电子科技大学出版社, 2008: 75-125)
[7]Yi K, Beheshti J. A hidden Markov model-based text classification of medical documents[J]. Journal of Information Science, 2009, 35(1): 67-81
[8]Yu Yingzhuo. Detection of abnormal behavior and posture recognition based on characteristics of human motion[D]. Xi’an: Xidian University, 2011 (in Chinese)(郁映卓. 基于人体运动特征的异常行为检测和姿态识别[D]. 西安: 西安电子科技大学, 2011)
[9]Yi He, Li Ye, Bao Shudi. Fall detection by built-in tri-accelerometer of smartphone[C]Proc of 2012 IEEE Int Conf on Biomedical and Health Informatics (BHI). Piscataway, NJ: IEEE, 2012: 184-187
[10]Gammeter S, Gassmann A, Bossard L, et al. Server-side object recognition and client-side object tracking for mobile augmented reality[C]Proc of 2010 IEEE Computer Society Conf on Computer Vision and Pattern Recognition Workshops(CVPRW). Los Alamitos, CA: IEEE Computer Society, 2010: 1-8
[11]Mantyjarvi J, Himberg J, Seppanen T. Recognizing human motion with multiple acceleration sensors[C]Proc of 2001 IEEE Int Conf on Systems, Man, and Cybernetics. Piscataway, NJ: IEEE, 2001: 747-752
[12]Akl A, Valaee S. Accelerometer-based gesture recognition via dynamic-time warping, affinity propagation, & compressive sensing[C]Proc of 2010 IEEE Int Conf on Acoustics Speech and Signal Processing (ICASSP). Piscataway, NJ: IEEE, 2010: 2270-2273
[13]Kwapisz J R, Weiss G M, Moore S A. Activity recognition using cell phone accelerometers[J]. ACM SIGKDD Explorations Newsletter, 2011, 12(2): 74-82
[14]Yi W, Jia W, Saniie J. Mobile sensor data collector using Android smartphone[C]Proc of the 55th IEEE Int Midwest Symp on Circuits and Systems (MWSCAS). Piscataway, NJ: IEEE, 2012: 956-959
[15]Frank E, Hall M, Holmes G, et al. Data Mining and Knowledge Discovery Handbook[M]. Berlin: Springer, 2005: 1305-1314
[16]Xu J, Güting R. A generic data model for moving objects[J]. GeoInformatica, 2013, 17(1): 125-172
[17]Zhao Guoying, Li Zhenbo, Deng Yu, et al. Human motion recognition and simulation based on retrieval[J]. Journal of Computer Research and Development, 2006, 43(2): 368-373 (in Chinese)(赵国英, 李振波, 邓宇, 等. 基于检索的人体运动识别和模拟[J].计算机研究与发展, 2006, 43(2): 368-373)
[18]Yang Lijuan, Zhang Baihua,Ye Xuzhen. Fast Fourier transform and its applications[J]. Opto-Electronic Engineering, 2004, 31(Z1): 1-3 (in Chinese)(杨丽娟, 张白桦, 叶旭桢. 快速傅里叶变换FFT及其应用[J]. 光电工程, 2004, 31(Z1): 1-3)

Li Feng, born in 1969. Professor and master supervisor at Donghua University. His main research interests include machine learning, pattern recognition, intelligent information processing and embedded operating system, etc.

Pan Jingkui, born in 1989. Master candidate in computer science and technology from Donghua University. His current research interests include machine learning, pattern recognition and embedded system (pjkui@qq.com).
中图法分类号TP391
基金项目:上海自然科学基金项目(11ZR1401500)
收稿日期:2014-10-30;修回日期:2015-04-16
This work was supported by the Natural Science Foundation of Shanghai (11ZR1401500).
猜你喜欢
计算机教育(2016年8期)2016-12-24
商场现代化(2016年29期)2016-12-23
现代经济信息(2016年27期)2016-12-16
湖北农业科学(2016年18期)2016-12-08
时代金融(2016年29期)2016-12-05
中国房地产·学术版(2016年10期)2016-11-18
大学教育(2016年11期)2016-11-16
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
考试周刊(2016年84期)2016-11-11
商业经济研究(2016年14期)2016-09-14
