基于多波束阵列天线的目标快速捕获方法
2016-04-26 04:49单福悦郑文博
无线电工程 2016年4期
单福悦,凡 嵩,岳 建,郑文博,米 明
(中国人民解放军63778部队,黑龙江 佳木斯 145000)
基于多波束阵列天线的目标快速捕获方法
单福悦,凡嵩,岳建,郑文博,米明
(中国人民解放军63778部队,黑龙江 佳木斯 145000)
摘要航天器在高动态下,需要宽波束来保证目标角度捕获概率,但目标的微弱信号需要高增益、窄波束的天线去接收,随之而来的是对高动态微弱信号目标的快速捕获问题。针对该问题,提出了基于多波束阵列天线的目标快速捕获的方法。它既可以采用多波束解决宽视场覆盖问题,又可以兼顾波束的高增益特性,通过研究多波束快速扫描、多通道能量检测等关键技术解决了低信噪比下的高动态信号检测和角度捕获跟踪。仿真结果表明,该方法可以完成对高动态、弱信号目标的快速捕获。
关键词信号检测;电波束;高动态;捕获跟踪
A Target Fast Acquisition Method Based on Multi-beam Array Antenna
SHAN Fu-yue,FAN Song,YUE Jian,ZHENG Wen-bo,MI Ming
(Unit63778,PLA,JiamusiHeilongjiang145000,China)
AbstractWhen spacecrafts are in high dynamic situations,wide beams are needed to guarantee the acquisition probability.However,antennas with high gain and narrow beam are necessary to receive the weak signals of target,along with which comes the issue of fast acquisition of high dynamic and weak signal target.To solve this problem,a target fast acquisition method based on multi-beam array antenna is proposed,which can not only realize wide coverage field of view with multi-beam,but also guarantee the high gain of beam.High dynamic signal detection and angle acquisition and tracking under low signal to noise ratio are addressed by exploring key technologies including quick scanning based on multi-beam array antenna and multi-channel signal detection.Simulation results show that it is feasible to realize fast acquisition of high dynamic and weak signal target by this method.
Key wordssignal detection;radio beam;high dynamic;acquisition and tracking
0引言
高动态目标速度快,轨道低,信号不稳定,可见弧度短,受大气条件和其他不确定因素的影响,其轨道往往会偏离事先预定的标准轨道。这对测控系统的捕获与跟踪能力提出很高要求。目前,数字阵列天线已经应用于航天测控中,电波束具有灵活的指向能力以及低副瓣性能等优势[1-2]。本文搭建一个可以形成4个波束,覆盖空域为20°×20°的阵列天线试验平台,电波束利用现有相控阵技术研究快速捕获波束方法,采取措施保证波束的指向精度,这是多波束成像的前提[3];对于多波束宽空域覆盖,还必须设计好在覆盖空域之内提供紧密交叠的波束特征,确保整个覆盖空域的接收信号的信噪比降低最小[4];同时,设计时要考虑电波束快速跟踪策略[5],以便目标位置粗捕获后,实现对目标的电波束快速自动跟踪[6-7]。
1高动态快速目标捕获
1.1高动态目标搜索
基于多波束阵列天线的目标快速捕获方法,原理框图如图1所示。
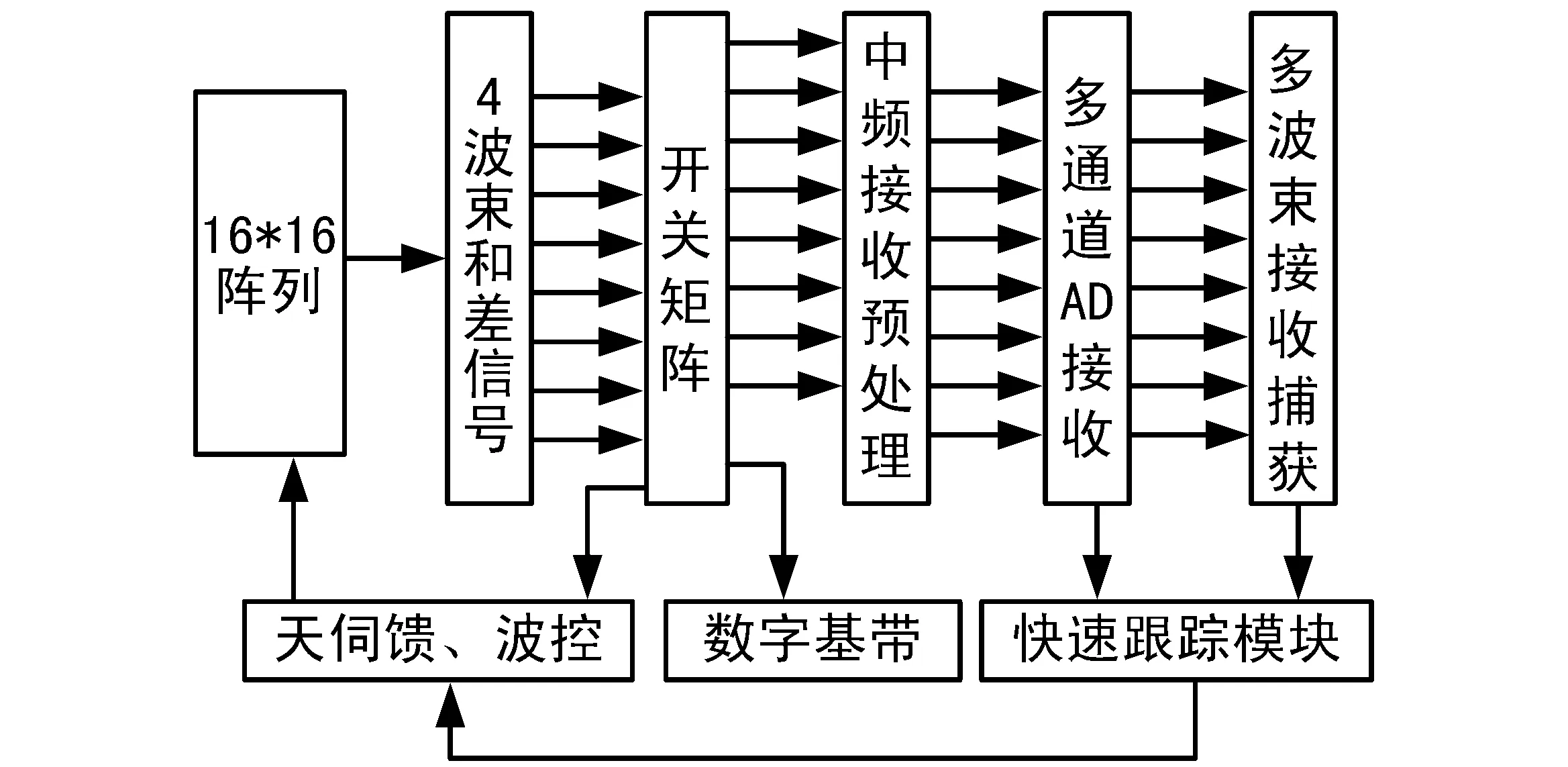
图1 基于多波束阵列天线的目标快速捕获方法
利用多波束同时在预定空域进行目标搜索,具体过程如下:
① 天线获得中心引导数据引导或理论引导,指向预定空域。
② 利用4个接收波束同时进行分块覆盖20°×20°空域扫描(每个波束负责扫描10°×10°空域),如图2(a)所示,搜索目标,完成多通道信号检测,一旦检测到信号,10 ms内判定空间目标位置,完成一次覆盖空域信号捕获。

图2 波束覆盖示意
③ 多波束数字处理终端对波束位置进行估计处理后,输出目标位置偏差、目标捕获指示和AGC电压等送波束控制和天伺分系统。
④ 波束控制分析响应,首先控制电波束在搜索到的目标位置完成闭环跟踪,同时ACU控制天线机械伺服闭环控制,使机械指向(波束1)和电波束指向逐渐一致。
⑤ 如果电波束伺服闭环跟踪失败,则天线波束继续4个波束在预定目标位置捕获;如成功引导电波束并完成稳定自跟踪,捕获过程完成,波束1(机械波束)转入目标自跟踪,进入系统测控流程。
⑥ 系统完成目标捕获跟踪后,同时利用波束3和波束4继续跟踪目标并在目标10°×10°空域进行覆盖扫描,如图2(b)所示。保证波束1(机械波束)意外丢失目标后,利用波束3和波束4搜索的结果可以迅速引导波束1(机械波束)跟踪目标。
1.2高动态信号检测
多波束信号检测是目标角度捕获的前提和关键[8],如果无法检测信号,就无法完成目标的角度捕获或跟踪,下面主要分析USB单音信号的可检测性。设第f(f=1,…,L)个波束指向处(单波束相对应的L=1),观测时间内采样得到的时域信号长度为N,其信号表达式可以表示为:
yl(i)=xl(i)+nl(i),1≤i≤N。
(1)
式中,n(i)为第(i=1,…,N)个采样点处均值为0、方差为σ2的加性高斯白噪声,且不同采样点的噪声变量是相互独立的。从时域上看,一般采样速率会高于接收信号的码速率,所以向后延时一个采样点后的信号与未延时的信号有很强的相关性,随着时延的增加,二者的相关性逐渐减弱,利用这种相关特性的差异判断目标信号是否存在[9]。对接收信号的自相关运算可以表示为:

(2)
取2个特征量E1和E2,
(3)

(4)
式中,N为一个码元符号内的采样点数;E1表示第1个码元符号内信号相关系数的平均;E2表示远离第1个(n为远大于1的正整数)码元符号相关性的平均。考察上述2个特征量的比值ηl=E1/E2,设定合理的门限值Γ,通过比较ηl与门限值Γ来判决目标信号是否存在。
1.3电波束跟踪
电波束角跟踪采用二型滤波环路[10],当目标运动的角速度恒定时,理论上不存在跟踪稳态误差。选择跟踪环路的带宽时需要综合考虑信噪比与目标动态之间存在相互矛盾。一方面,为了减少噪声和抖动的影响,阻止不需要的信号成分,提供平滑的目标运动角度输出,希望带宽窄些;另一方面,为了快速跟踪目标轨道的变化,需要较宽的跟踪环路带宽[11]。电波束跟踪原理如图3所示。
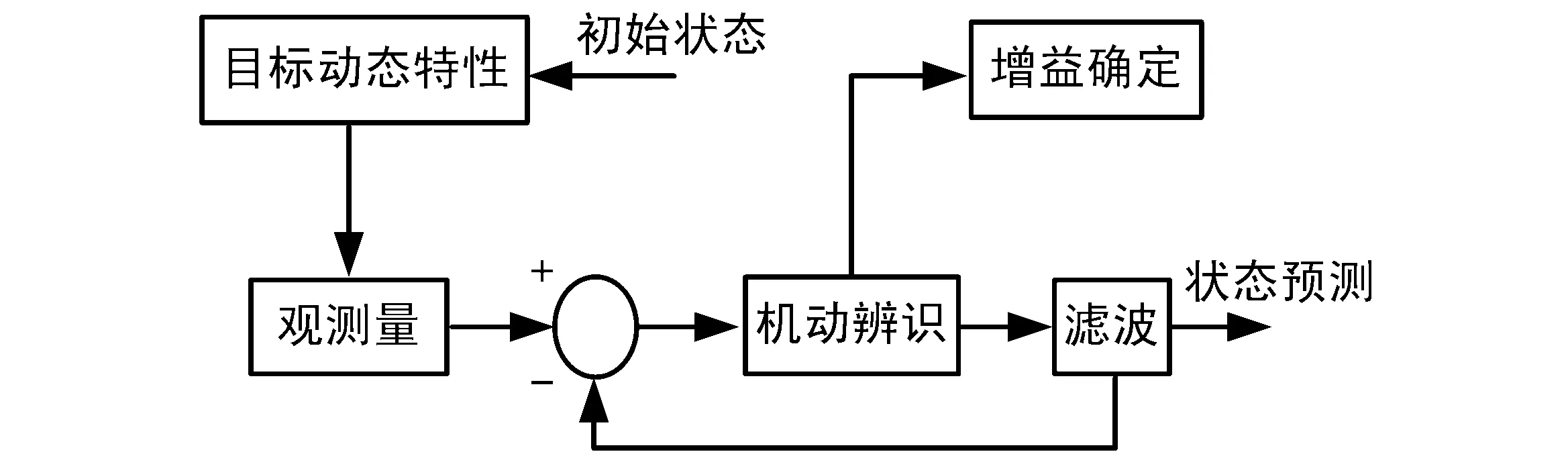
图3 电波束跟踪原理
卡尔曼滤波[12]根据信息(观测量与状态预测量之间的差)的变化进行目标机动特性的辨识,并按照一定的准则调整滤波器增益,最后由滤波算法得到目标的状态估计和预测量。环路滤波输出的状态预报值作为结果输出给收发波束形成模块[13-14],用以计算移相器的相移量,控制波束指向,从而完成数字波束闭环跟踪。
2仿真分析
2.1信号检测仿真
根据试验平台技术条件C/N0=43 dBHz,取一定余量,按照C/N0=41 dBHz条件进行仿真。高动态检测分析时间长度为2 ms,等效带宽为500 Hz,等效信噪比为S/N≥23 dB。检测概率大于99.99%(S/N=23 dB),虚警概率小于10-7(S/N=23 dB)。以接收信号多普勒为±500 kHz,进行了仿真,仿真结果如图4所示。
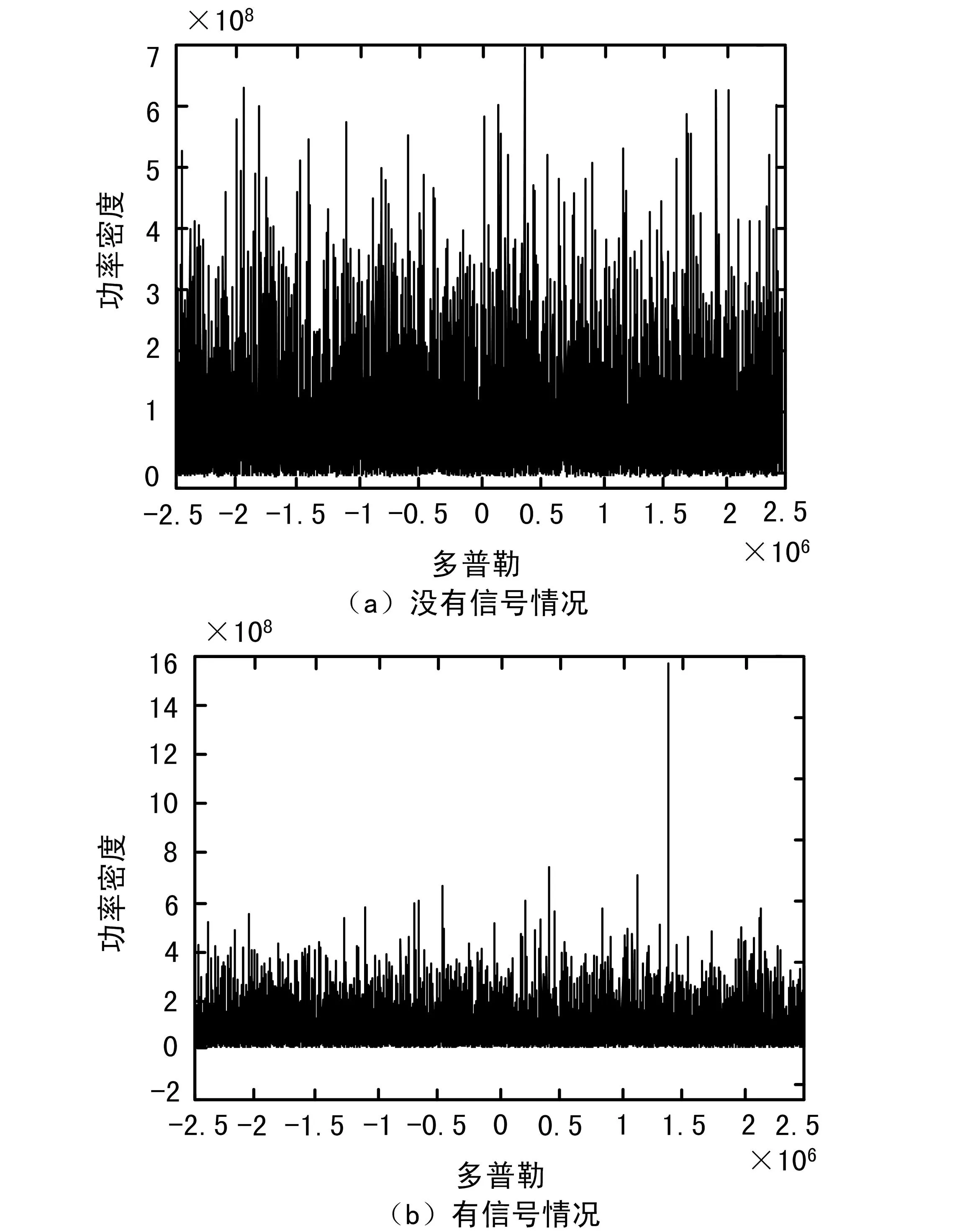
图4 信号检测仿真
通过仿真表明,在2 ms时间内可以完成信号的检测,C/N0=41 dBHz时,检测概率、虚警概率满足要求。
2.2高动态角捕获性能仿真
在试验平台上,分别进行不同目标角动态情况下的角捕获过程和覆盖20°引导波束宽度,不同动态情况下引导天线的角捕获概率的仿真。经过蒙特卡洛仿真(10 000次),得到结果如图5所示。
由图5(a)可见,即使目标运动角速度达到20°/s时,目标位置与天线指向之间的角度差不超过半个波束覆盖空域(10°),天线不会丢失目标。系统能完成捕获,不会丢失目标。图5(b)可见,覆盖波束宽度为20°时,对角速度小于20°/s的目标捕获概率在99%以上。因此方法能完成对高动态目标的快速捕获。
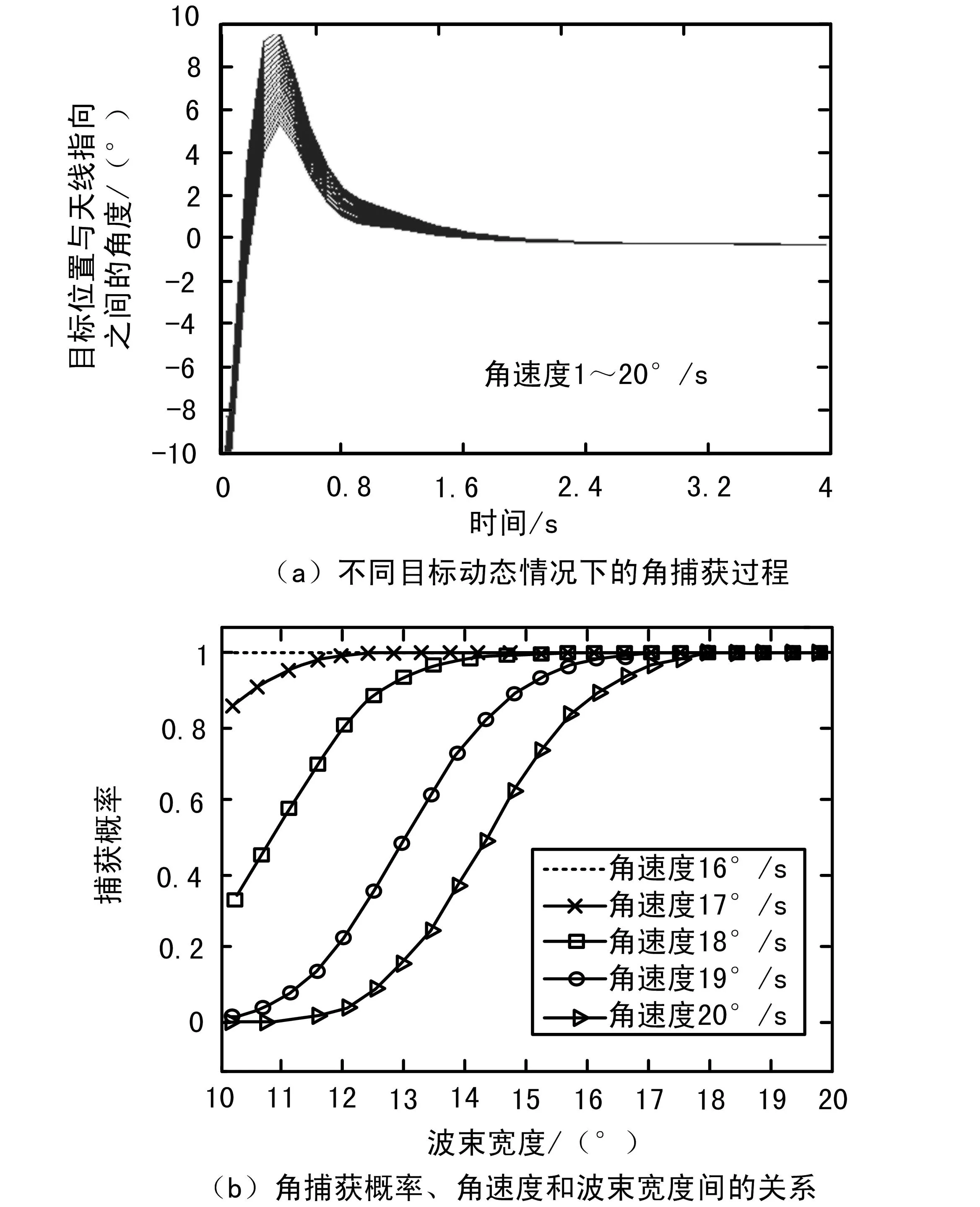
图5 角捕获仿真
3结束语
本文论述了基于多波束阵列天线的目标快速捕获方法,研究表明,通过4个波束进行分区覆盖扫描和波束引导,能够实现快速发现并引导天线跟踪目标。在低信噪比条件下能够在很短的时间内完成信号检测。该方法可以实现对由于目标回波振幅起伏、角闪烁和接收机噪声等引起的弱信号、高动态目标的捕获与跟踪。
参考文献
[1]吴海洲,王鹏毅,郭肃丽.全空域相控阵测控系统波束形成分析[J].无线电工程,2011,41(11):13-15.
[2]李辉,杨景曙,崔垛.基于矢量频率锁定环的高动态GPS信号跟踪[J].系统仿真学报,2012(4):64-66.
[3]夏启军,孙优贤,周春晖.渐消卡尔曼滤波器的最佳自适应算法及应用[J].自动化学报,1990,16(3):210-216.
[4]沈锋,贺瑞,吕东泽.基于卡尔曼滤波器的高动态GPS载波跟踪环[J].宇航学报,2012,33(8):1 041-1 047.
[5]邱玲,沈振康.三维纯角度被动跟踪定位的最小二乘—卡尔曼滤波算法[J].红外与激光工程,2001,30(2):83-87.
[6]杨元喜,高为广.两种渐消滤波与自适应抗差滤波的综合比较分析[J].武汉大学报(信息科学版),2006,31(11):980-982.
[7]穆静,蔡远利.迭代容积卡尔曼滤波算法及其应用[J].系统工程与电子技术,2011,33(7):1 454-1 457.
[8]陈金广.目标跟踪系统中的滤波方法[M].西安:西安电子科技大学出版社,2013:29-32.
[9]沈哗青,龚华军,熊琰.自适应卡尔曼滤波在目标跟踪系统中的应用[J].计算机仿真,2007,11(5):102-106.
[10]魏晓宁.基于视频跟踪系统的卡尔曼滤波器方法研究[J].计算机工程与科学,2011,33(11):113-116.
[11]陈林.一种基于卡尔曼滤波的运动目标跟踪方法[J].舰船电子对抗,2011,34(3):67-70.
[12]张怀恨,张林让.一种新的多目标角跟踪方法[J].电子与信息学报,2007,29(12):2 840-2 842.
[13]王小旭,潘泉,黄鹤,等.非线性系统确定采样型滤波算法综述[J].控制与决策,2012,27(6):801-812.
[14]郝燕玲,杨峻巍,陈亮,等.基于平方根中心差分卡尔曼滤波的大方位失准角初始对准[J].中国惯性技术学报,2011,19(2):180-184.
单福悦男,(1983—),工程师。主要研究方向:测控。
凡嵩男,(1989—),工程师。主要研究方向:测控。
《无线电通信技术》欢迎投稿
投稿:ctibjb@163.com,huangyl1633@163.com,http://www.wxdt.cbpt.cnki.net
网址:http://www.cti.ac.cn
联系电话:0311-86924954联系人:黄玉兰
通信地址:河北省石家庄市174信箱215分箱邮编:050002
作者简介
中图分类号TN957.2
文献标志码A
文章编号1003-3106(2016)04-0060-03
收稿日期:2016-01-02
doi:10.3969/j.issn.1003-3106.2016.04.15
引用格式:单福悦,凡嵩,岳建,等.基于多波束阵列天线的目标快速捕获方法[J].无线电工程,2016,46(4):60-62,74.