一种基于激光干涉原理的水声应答器系统设计
2016-04-26 06:12张文霞青岛理工大学琴岛学院山东青岛266100袁健山东省科学院海洋仪器仪表研究所山东青岛266001
自动化博览 2016年2期
张文霞(青岛理工大学琴岛学院,山东 青岛 266100)袁健(山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
一种基于激光干涉原理的水声应答器系统设计
张文霞(青岛理工大学琴岛学院,山东 青岛266100)
袁健(山东省科学院海洋仪器仪表研究所,山东 青岛266001)
随着海洋资源的开发利用和对海洋环境研究的深入,水下目标定位的应用越来越广泛。无论是在长基线、短基线或超短基线定位系统中,水声应答器均是关键部件之一,它可以根据整个定位系统的需要,控制水下传感器以提供目标的测试数据[1、2]。海洋环境水声信道的环境复杂,如:强噪声、强起伏、多径干扰、多普勒频移,对水声应答器的精度、可靠性、功耗等都有特殊要求[3、4]。然而由于传统压电陶瓷接收式水声应答器存在非线性响应的缺陷[5],导致输入信号幅度与输出的信号大小成非线性关系。本文设计一种激光干涉接收式水声应答器,应答器由光路部分和电子部分组成。光路部分主要完成微弱水声信号的检测,电子部分完成光电转换以及回发脉冲的生成和发射功能,利用激光干涉方法[6、7]接收并检测微弱的水声信号。其具有线性响应特性,检测的水声信号幅度与输出的信号大小成线性关系,避免了压电陶瓷固有的非线性响应。具有检测范围宽、检测精度高的优势,可以用于远距离水声定位系统、水下石油勘探二次定位等技术领域。
1 激光干涉式应答器系统结构与工作原理
激光干涉接收式水声应答器由三部分构成,如图1所示:(1)前端信号接收及预处理模块。由激光干涉式水声检测模块和信号调理模块组成;(2)信号处理模块。采用单片机进行数据采集、信号判别和回发信息的编码生成;(3)脉冲回发模块。由增益自动调节模块、功率放大模块和压电陶瓷换能器构成。

图1 激光干涉式水声应答器结构图
激光干涉式水声检测模块,如图2所示,是由振动膜、透镜、反射镜等组成的光学传感部分。激光干涉式水声检测模块的工作原理是,由光源发出的单频激光经准直仪投射到分光镜上,经分光镜将入射光线分成两束:一束进入测量臂,通过透镜照射到置于透镜焦点处的测量反射镜上。此光束再由测量反射镜反射,经过透镜后,以与原入射光束平行的方向返回到分光棱镜上;另一束入射到固定在相位调制压电陶瓷2上的参考反射镜2后,反射到另一个固定在相位补偿压电陶瓷1上的参考反射镜1上,再由参考反射镜1反射回分光棱镜。这样两束光经测量反射镜和参考反射镜1、2反射后,分别照射到分光棱镜后重新会合并反射到光电探测器上,并维持一个恒定的干涉图案。干涉图案通过光电二极管转化为电信号;电信号在信号预处理系统(如图3所示),经过放大、滤噪等过程进入信号处理系统。信号处理模块对预处理后的信号进行采集和A/D转换并进行脉冲检测,检测到有效脉冲后,进行脉冲判别并生成回发脉冲信号,然后输出回发脉冲信号给脉冲回发模块。脉冲回发模块主要将信号处理模块输出的回发脉冲信号经增益自动调节模块调整到发射模块要求的输入范围,经功率放大模块进行放大,驱动压电陶瓷,完成脉冲回发。系统工作电源由内置锂电池供电,通过电源转换模块提供激光器和其他电路模块的工作电压和电流。
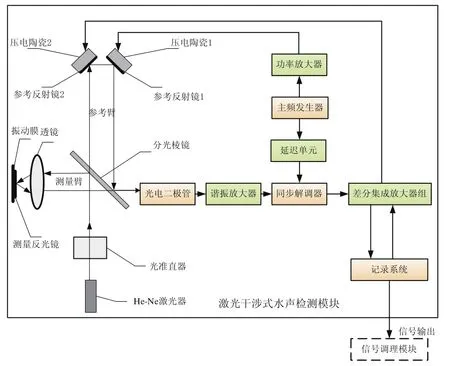
图2 激光干涉式水声检测模块结构图

图3 信号调理模块结构图
2 系统软硬件模块化设计
2.1硬件系统设计
前端信号接收及预处理模块由激光干涉接收式水声检测模块和信号调理模块组成。采用激光干涉检测方法的水声检测模块采用激光干涉式接收方式。激光干涉式水声检测模块主要由光路部分和电子部分组成。光路部分由:稳频氦-氖激光器、光准直器、分光镜组成;电子部分由光电二极管、谐振放大器、同步解调器、延迟单元、主频发生器、功率放大器、差分集成放大器组、记录系统组成。其中光路部分,采用圆形振动片作为接收器的感应元件,接收器采用低功耗、小体积的稳频氦-氖激光器作为光源,生成稳定的具有固定波长的激光。光准直器将发射的激光进行准直处理。分光镜实现对入射激光的反射和透射。光电二极管接收光信号,把干涉光信号转化为电信号。谐振放大器工作在线性区间,把接收到的电信号进行放大10,000倍;放大的信号频率是25kHz,放大器产生的信号正比于干涉检测模块的两个干涉臂的长度之差,避免非线性因素的影响。主频发生器产生频率、振幅、占空比固定的(25kHz,5V)主频信号用于对光电二极管输出的干涉电信号的调制。延迟单元对来自主频发生器的主频信号产生半个波长的相移,用于对经过主频信号已调制的干涉信号的解调。这样就构成一个调制-解调通信系统,可以有效避免外界低频噪声对干涉信号的影响。功率放大器把主频信号进行放大,用来控制压电陶瓷1,达到对干涉强度图样进行调制的效果以避免低频噪声。同步解调器,接收来自延迟单元的被延迟了半个波长的主频发生器信号,对被调制的原始干涉电信号进行解调,其产生振幅正比于输入信号相位的两路信号,得到解调后的原始干涉电信号,然后把解调后的原始干涉电信号送给差分集成放大器组。差分集成放大器组由两级放大电路组成,其中第一级为跟随器,第二级为放大器。第二级放大器的输出信号通过升压变压器后,输出高压电信号,用来控制压电陶瓷2的振动,对光程差进行拉伸和压缩,补偿了干涉检测模块中干涉臂长之间的光程差。其中升压变压器的匝数比根据压电陶瓷的输入输出特性确定,压电陶瓷2在±λ/2(λ为激光波长)范围内来补偿干涉仪臂长之间的光程差,超出±λ/2的光程差需要进行复位。
记录系统对差分集成放大器组的第一级跟随器的输出电压进行A/D采样。采用单片机的比较器输入端口,其采集并比较差分集成放大器组一级跟随器模块的输出电压与内部参考电压)的大小。当一级跟随器模块的输出电压的最大值时,单片机输出幅值周期为1ms的正复位脉冲,使差分集成放大器组的二级放大电路经过变压器输出高压信号,驱动压电陶瓷2产生相应的形变,此时对应光程差拉伸λ/2;当时,单片机输出幅值周期为1ms的负复位脉冲,输出到差分集成放大器组的二级放大器,二级放大器经过变压器后输出高压信号,驱动压电陶瓷2产生相应形变,此时对应光程差收缩λ/2。单片机记录下正复位、负复位的次数,输出模拟信号(正比于光程差)的值计算如下:

海洋中的低频噪声会引起高灵敏的振动膜的微小形变,该形变可以改变迈克尔逊干涉仪的位相差,导致干涉条纹的变化,为滤除海洋中低频噪声对信号的影响,通过设计和调节滤波器组的滤波参数调理模块进行噪声滤除。图3是本文提出的激光干涉式水声应答器信号调理模块结构图,主要由前置滤波器和窄带滤波器组成滤波器组以及放大检波和门限比较器组成,滤波器组主要完成信号的预处理功能;激光干涉式水声检测模块的输出信号经前置滤波、两路窄带滤波、信号放大、包络检波、自适应门限比较器,一部分进入单片机I/O口,一部分经过逻辑或非门,并与单片机中断输入端口相接,触发外部中断。自适应门限比较器的门限电压由输入电压的RC充电电路提供,门限电压是随输入电压的高低而动态变化的,调节RC充放电时常数,可以动态调整输入电压使输出电压满足单片机数据采集端口的电压要求。
2.2软件系统设计
该嵌入式软件主要完成以下功能:
(1)通过水声换能器实现水声应答器脉冲信号的生成和发送;
(2)对接收水声换能器的模拟信号进行采样和存储。
激光干涉式水声应答器的接收模块采用激光干涉式检测方法,发射模块采用水声探头换能器(压电陶瓷)进行发射,接收到的信号经过信号预处理模块,进入信号处理系统,信号处理模块主要由AVRMega16L单片机组成。Mega16L单片机主要完成采集信号的校验、解码、判决和回发脉冲的产生等功能。信号调理模块中的或非门模块与单片机的中断输入端口连接,其输出信号触发外部中断。控制软件由主控程序和中断服务子程序构成。
单片机主程序首先进行端口初始化,初始化定时器和外部中断向量寄存器,然后开中断并进入休眠模式。等待外部中断,若发生中断则进入中断服务子程序,工作流程(如图4所示)为:
AVRMega16L单片机主程序首先进行端口初始化,定义端口数据方向和功能;初始化定时器和模拟数字转换端口;然后打开定时器,通过PWM端口发送一定数量的脉冲,该脉冲信号经过单片机的定时器2口发出后,经功率放大器模块进行信号放大,并经变压器产生高压信号驱动换能器压电陶瓷,并由换能器声压电陶瓷探头发出振动信号。采用轮询方式进行AD采样,每隔13ms采集一次,采样完成后进行采样数据处理与存储,延迟500ms后,进行下一次发送和接收。

图4 信号处理模块单片机主程序流程图
中断服务子程序采集两路脉冲信号并存储,然后判断所采集的信号是否为标识位,去除标识位之后,进行一定次数的采样(采集8次)。采集次数满足后,进行判断:若是与该应答器预置的组码相同,则单片机对将要回应的信息进行编码,该信息包含应答器的预置身份识别码,中断服务子程序软件流程如图5所示,回应脉冲编码完成后,该脉冲信号经过单片机的PWM口发出后,经功率放大器模块进行信号放大,并经变压器产生高压信号驱动换能器压电陶瓷,并由换能器声压电陶瓷探头发出振动信号,如图6所示。
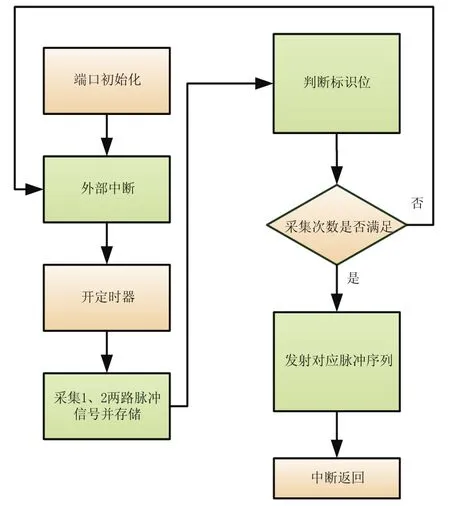
图5 信号处理模块单片机中断服务子程序流程图

图6 脉冲回发模块结构图
3 系统实验
3.1部分关键模块电路设计
图7所示电压转换与稳压电路的核心芯片为LM7805,其将12VDC稳压输出为5VDC,其中电容均为100F,L2为10mH的电感,D1为4007二极管。

图7 电源转换与稳压模块
信号接收与预处理电路图如图8所示,接收到的模拟信号经过前置低通和带通滤波器后,再利用差分放大器进行信号放大。

图8 水声信号接收与预处理电路
图9为Mega16L单片机及外围元件电路图。其中第11引脚进行模拟电信号采集,第16引脚发送PWM脉冲信号。第9、10引脚分别连接RS232模块的第12和第11引脚,第4引脚连接复位电路的Reset信号端,低电平有效。第7、8引角连接外部8MHz晶振,第6、18、39引脚连接数字地GND,第19、20、21、22、23、34引脚分别连接JTAG端口的SCL、SDA、TCK、TMS、TDO和TDI信号端。第5,17,38引脚连接数字电源VCC端,第27引脚连接模拟电源端口AVCC,VCC和AVCC通过10H电感进行连接。第29引脚AREF通过100pF的电容与数字地GND连接。第29引脚与数字地GND连接。其他引脚悬空。

图9 Mega16L单片机及外围元件
图10为脉冲发射模块,其中发送功率放大模块T1为16:270变压器,脉冲电压峰峰值约800V,将来自于SSP端脚的PWM信号进行放大以驱动压电陶瓷进行水声信号发射。

图10 脉冲发射模块
图11(a)和图11(b)为单片机控制板系统图和PCB图,控制板处理器选用Mega16L是基于增强的AVRRISC结构的低功耗8位CMOS微控制器。其先进的指令集以及单时钟周期指令执行时间,Mega16L的数据吞吐率高达1MIPS/MHz,可以减缓系统在功耗与处理速度之间的矛盾,能够满足系统的需求。

图11(a) 单片机控制板系统图

图11(b) 单片机控制板PCB图
3.2实验结果
将激光干涉式应答器置于实验水池中,调整好压电陶瓷换能器发射面与挡板间的距离,固定好应答器后,可用数字示波器测得电路板上经带通滤波电路处理前的回波信号和单片机的采样的模拟信号。通过调节滤波器组的滤波参数,能够滤除一定频率的噪声。图12为连接35kHz水下换能器,在挡板距离为0.75m时测得的回波波形,图13为带通滤波电路处理后的回波信号。对比图12和图13,可见滤波后的回波脉冲波形消除了信号毛刺,利于单片机对回波模拟信号的采集和码判断,从而在一定程度上减小误码率。
图12滤波前的回波脉冲信号
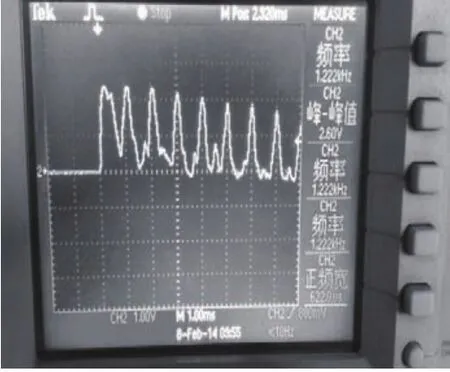
图13 滤波后的回波脉冲信号
4 结论
利用激光干涉方法接收并检测微弱的水声信号,避免了压电陶瓷固有的非线性响应。利用系统模块化设计理念设计了应答器系统前端信号接收及预处理模块、信号处理模块和脉冲回发模块的软硬件,对应答器系统进行了收发测试,针对系统调试中出现的噪声问题,通过调节滤波器参数进行了系统参数调节,达到了预期目标。
参考文献:
[1]田坦,刘国枝,孙大军.声呐技术[M].哈尔滨:哈尔滨工程大学出版社,2000.
[2]惠俊英,李春旭,梁国龙等.声压和振速联合信号处理抗相干干扰[J].声学学报,2000,25(5):389-394.
[3]冯海鸿,梁国龙,惠俊英.目标方位的声压,振速联合估计[J].声学学报,2000,25(6):516-520.
[4]窦秀明,代作晓,华建文等.激光干涉信号的位置及偏差提取[J].光电技术应用,2007,28(4):576-578.
[5]R.S.Bucy,P.D.Joseph.Filtering for Stochastic Processes with Applications to Guidance[M].AMSChelsea Publ.,2005.
[6]杨振寰著,母国光,羊国光,庄松林译.光学信息处理[M].天津:南开大学出版社,1986.
[7]G.I.Dolgikh.Study into Seismoacoustic Processes in the Ocean-Continent Transition Zone by the Unequal Arm Laser Strainmeter[M].Cand.Sci.(Phys.-Math.)Dissertation,Vladivostok,1988.
张文霞(1980-),女,山东临沂人,讲师,硕士,现就职于青岛理工大学琴岛学院机电工程系,主要研究方向为检测技术与自动化装置。
袁健(1980-),男,山东荣成人,助理研究员,博士,现就职于山东省科学院海洋仪器仪表研究所,主要研究方向为海洋检测仪器开发。
摘要:传统压电陶瓷接收式水声应答器存在非线性响应的缺陷,导致输入信号幅度与输出的信号幅度成非线性关系。本文基于光学干涉仪原理设计一种激光干涉接收式水声应答器。利用激光干涉方法接收并检测微弱的水声信号,检测的水声信号幅度与输出的信号大小成线性关系,避免了压电陶瓷固有的非线性响应;利用系统模块化设计理念设计了应答器系统前端信号接收及预处理模块、信号处理模块和脉冲回发模块,对应答器系统进行了收发测试,并针对系统调试中出现的问题进行了系统参数调节和改进。
关键词:非线性响应;激光干涉原理;水声应答器;模块化设计方法
Transponder System Based on Laser Interference Principle
Abstract:Since the conventional underwater acoustic transponder is made of piezoelectric ceramic with the nonlinear response,we designed a kind of hydroacoustic transponder based on laser interferometer principle.It is based on the principle of laser interferometry to detect weak signals,avoiding the non-linear response of the inherent piezoelectric ceramics,with a linear relation between the detected acoustic signal and its output signal.We designed the front-end module named signal receiving,pre-processing module,signal processing module and the back-pulse module using the modular concept and made an experiment to test the laser interference principle based transponder and adjusted the filter parameters to improve the transponder filter performance.
Key words:Nonlinear response; Laser interference principle; Underwater acoustic transponder; Modular design method
作者简介
基金项目:★山东省自然科学基金项目(ZR2012FL18);青岛科技发展计划项目(13-1-4-172-jch);山东省海洋生态环境与防灾减灾重点实验室开放课题(201308)
文献标识码:B
文章编号:1003-0492(2016)02-0094-05
中图分类号:TP273