四元阵型MEMS矢量水听器微结构设计*
2016-04-22 07:13张国军王续博张文栋
传感技术学报 2016年2期
郭 静,张国军*,刘 源,王续博,张文栋
(1.中北大学仪器科学与动态测试教育部重点实验室,太原030051;2.中北大学电子测试技术重点实验室,太原030051)
四元阵型MEMS矢量水听器微结构设计*
郭静1,2,张国军1,2*,刘源1,王续博1,张文栋1
(1.中北大学仪器科学与动态测试教育部重点实验室,太原030051;2.中北大学电子测试技术重点实验室,太原030051)
摘要:针对当前的MEMS矢量水听器存在左右舷模糊问题,提出了一种四元阵型MEMS矢量水听器微结构。首先,从理论上分析了当前的MEMS矢量水听器左右舷模糊问题,从而提出了可消除左右舷模糊的四元阵型MEMS矢量水听器微结构。其次,对四元阵型MEMS矢量水听器微结构进行有限元仿真,声源方向可以通过分析各阵元应力分布情况而唯一确定。最后,通过驻波声场试验验证其可行性,结果表明,该微结构可实现左右舷分辨,有效消除左右舷模糊。
关键词:MEMS;左右舷模糊;Ansys;矢量水听器
矢量水听器作为一种能够时间同步、空间共点测得水下声场矢量信息的传感器[1],在海洋工程和海洋开发中有着广泛的应用前景。目前,有很多关于矢量水听器技术的研究,具有代表性的是美国Benjamin利用T356B08型加速度计采用部分集成电路工艺制作矢量水声传感器[2]。1996年,Howard K,Rockstad T,Kenny W等人利用MEMS技术和电子原理制作出了8 cm3的微型声速度传感器[3]。美国波士顿大学研制的水下声场传感器[4],通过检测反射的激光束可检测声场变化。然而,在水听器实际应用中,克服左右舷模糊是矢量水听器研制的关键技术之一。
其中,基于MEMS技术研制的矢量水听器正逐渐向微型化、集成化发展[5],并已经可以进行目标定向功能,例如专利号为200610012991.0的中国发明专利公开的一种“共振隧穿仿生矢量水声传感器”,实现了对水下声信号二维平面内方位的探测[6-7]。但是,随着对该水听器研究的进一步深入,该水听器同样存在左右舷模糊等问题[8-10]。具有实时左右舷分辨能力的三类主要拖线阵声纳分别是拖曳多线阵multiline、三元组水听器拖曳单线阵tripletarray和声矢量传感器拖曳单线阵[11-13]。它能有效地实现左右舷分辨,但也存在着缺点:物理尺寸较大,开发费用高,以及对安装精度要求高等[14]。
针对上述问题,本文以单个MEMS矢量水听器微结构为基础,提出了一种四元阵型MEMS矢量水听器微结构。利用该微结构制作的矢量水听器工作时相当于四只单矢量水听器同时从四个不同方向获取矢量信息,可以通过数据融合技术对获取的矢量冗余信息从决策级和数据级的融合层次进行融合处理,对声源目标的方位进行估计,从而可消除MEMS矢量水听器对方位信息的敏感性,有效解决左右舷模糊问题。
1 四元阵型MEMS矢量水听器微结构设计
1.1MEMS矢量水听器工作原理
文献[11]提出了一种“纤毛式MEMS矢量水声传感器”,该矢量水听器微结构如下图1所示。
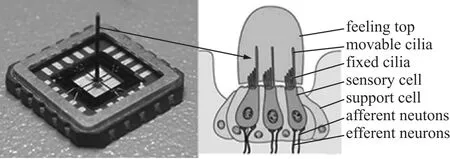
图1 纤毛式矢量水听器微结构示意图
仿生纤毛模仿生物的可动纤毛,固定于四悬臂梁中心位置。压敏电阻模仿生物的感觉细胞,位于悬臂梁的应力集中处。MEMS仿生矢量水听器在应用于声信号探测时,满足远场条件,声波近似为沿平面波传播。在均匀介质中,平面波声压方程可表示为[15]:

振速方程可表示为[15]:

式中,k=ω/c是波矢量,方向为声波传播的方向,ω是声波的角频率,c是介质的声速;φ为入射声波仰角,取值范围为[] -π/2,π/2;θ为入射声波水平方位角,取值范围为[0,2π];ρ0为介质密度。矢量水听器探测声信号模型如图2所示。
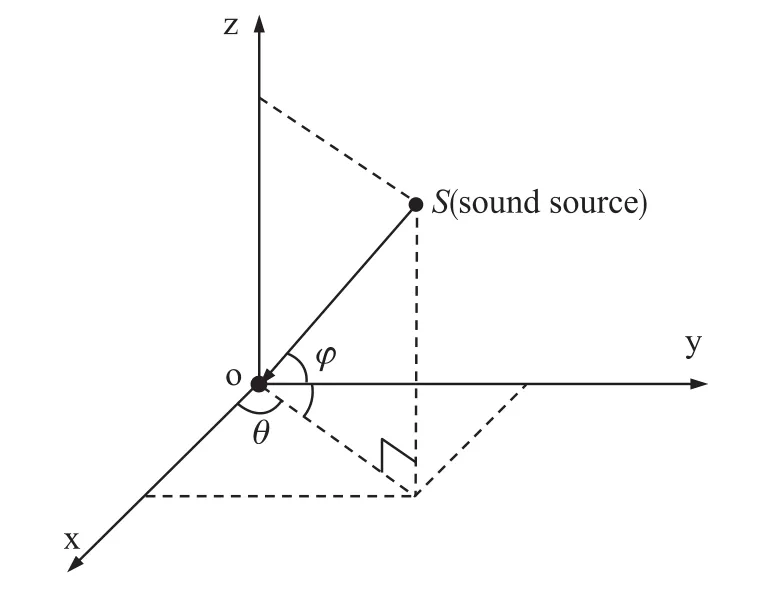
图2 波矢量在直角坐标系中分量
上式表明,平面波的声压与质点振速分量之间仅差一个常数,即波阻抗ρ0c,两者的波形则是一样的,因而对平面波来说,声压与振速是完全相关的。
由式(2)可得平面波内质点振速的两个分量:
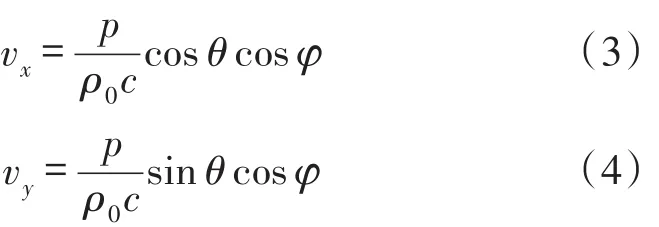
因此入射声波水平面方位角:

因此,只要测得质点振速在水平面内的二个分量vx,vy,就可以得到声源在水平面内的方位角θ,从而实现水下声信号的探测。
1.2左右舷模糊
MEMS矢量水听器仿生微结构包括两部分:高精度四梁-中心连接体微结构和刚硬塑料柱体。其中,高精度悬臂梁上分布压敏电阻,并构成两路全桥电路,如下图所示。水下声音信号在传播过程中会引起刚硬塑料柱体偏斜,从而产生对高精度悬臂梁的不对称应力,则可以通过梁上压敏电阻实现水下声音信号的探测。
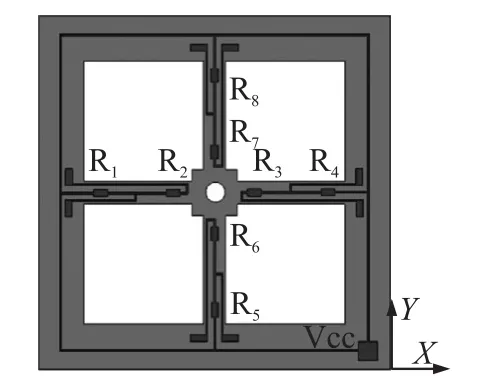
图3 仿生微结构上压敏电阻排布图
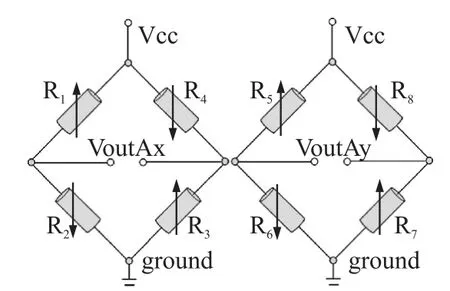
图4 压敏电阻电桥连接示意图
根据微结构的力学模型[16-17],当分别从X轴的正方向和负方向上加载相同的应力时,X轴向梁结构受到应力分别为:
式中,FH=mg,m是仿生纤毛质量,L、b、t分别是悬臂梁的长、宽及厚,2 a是中心质量块边长,M中心质量块弯矩。由以上分析可知,相对的两个方向的应力使得梁上的应力分布相等。压敏电阻布置在梁上应力敏感区,以压敏电阻受到应力后值的变化来反应梁结构上应力的变化。
MEMS量水听器微结构中的P型压敏电阻的变化率[18]:

在微结构的设计过程中,尽可能利用纵向效应而抑制横向效应,因此σt非常小可以忽略,于是有压敏电阻变化率:

Ax电桥的输出电压表达式为:

这时,R1=R2=R3=R4=R,ΔR1=ΔR2=ΔR3= ΔR4=ΔR。式(10)能够近似表示为:

所以,从x轴的正方向和负方向上加载相同的应力时,电阻变化率相等,输出电压一致,水听器微结构无法判断两个方向,存在左右舷模糊问题。
1.3四元阵型微结构设计
针对上述问题可采用阵列式水声传感器来消除左右舷模糊。水听器敏感微结构阵元数目的选择应从系统可靠性和资源的合理分配、系统成本、系统体积和加工条件四个方面考虑[19]。阵列传感器的阵元数越多,阵列的分辨力越强,测向精度越高,但研制成本和对硬件设备等的要求也会提高[20-21]。综合考虑以上因素,本文基于2×2面阵提出一种四元阵型MEMS矢量水听器微结构。结合MEMS水听器的矢量性及两路信号的对称性,设计四阵元相对于正方形衬底之间的角度分别为0°、30°、45°和60°(如图5所示)。
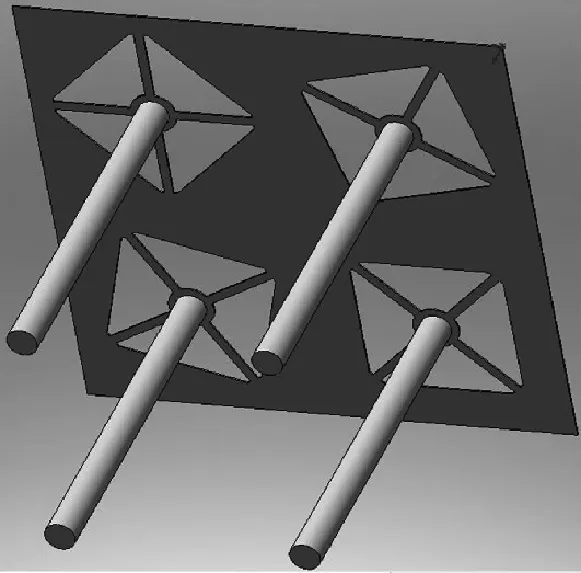
图5 四元阵型MEMS矢量水听器微结构
该结构包括正方形衬底,正方形衬底上刻蚀有四个十字形悬臂梁,每个十字形悬臂梁中心固定有微型柱状体,十字形悬臂梁的梁臂上设有压敏电阻,阵列微结构上压敏电阻的排布图及惠斯通全桥差动电路原理图如图6、图7所示。
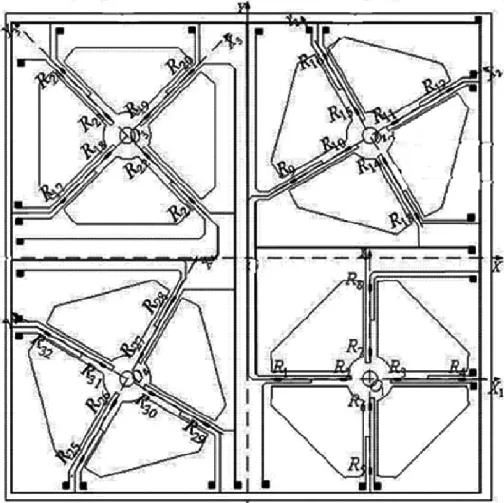
图6 阵列微结构上压敏电阻的排布图
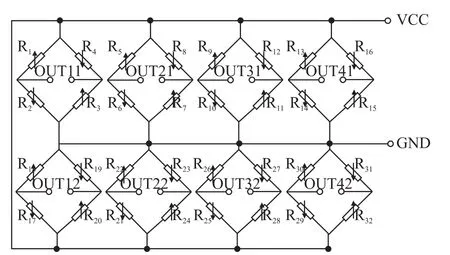
图7 惠斯通全桥差动电路原理图
MEMS四元阵型矢量水听器接收信号示意图如图8所示。
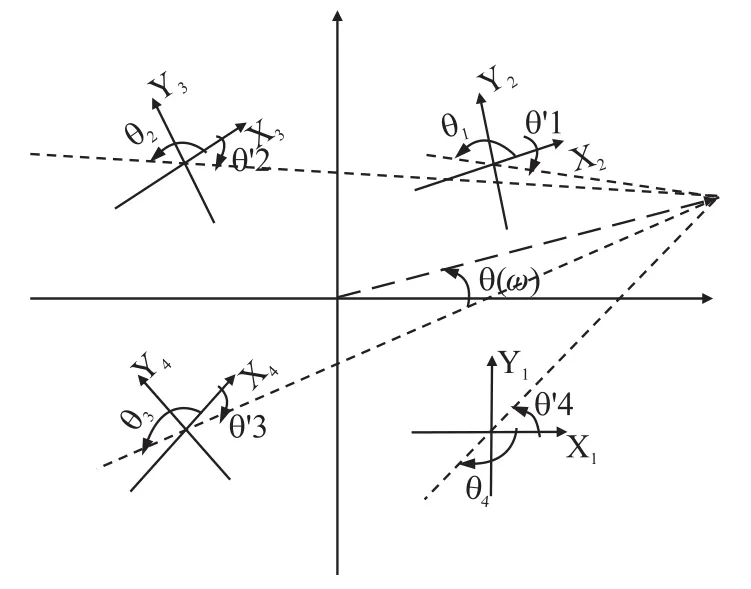
图8 阵列微结构接收信号示意图
假定绝对坐标系XOY第一象限下有一声源目标,矢量水听器微结构的四个阵元感知到声信号后,将会在各自的相对坐标系下产生两个角度:X1OY1为θ1(ω)与θ1′(ω),X2OY2为θ2(ω)与θ2′(ω),X3OY3为θ3(ω)与θ3′(ω),X4OY4为θ4(ω)与θ4′(ω)。由此可以看出单独依靠任何一个阵元都无法确定声源位置,即存在左右舷模糊,与理论分析结果一致。然而将4个阵元结合起来,沿角度θ1(ω)、θ2(ω)、θ3(ω)、θ4(ω)方向上将在绝对坐标系XOY下产生一个交点S,连接该交点S与绝对坐标系XOY的原点产生角度θ^(ω),即声源位置,对于其他角度的组合方式都无法交于一点,因此消除了在左右舷模糊问题。
2 有限元仿真
为验证本论文中微结构设计的合理性,采用ANSYS软件对该微结构进行静力仿真。沿绝对坐标系中X方向在纤毛柱体外表面上施加1 Pa的压力外载荷,以模仿声压作用在仿生纤毛柱体上的情况,通过分析各阵元悬臂梁受力情况来确定声源方向并验证该微结构具有左右舷分辨能力。通过静力分析得到了四元阵型微结构在该作用力下的应力云图,如图9所示。
设定沿绝对坐标系第一到第四象限中十字形悬臂梁结构分别为阵元二、阵元三、阵元四和阵元一。分析应力云图分布,并对各阵元中梁结构定义路径,得出应力曲线如图10所示。
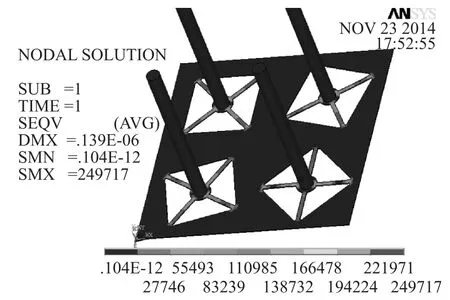
图9 四元微结构静力仿真应力云图
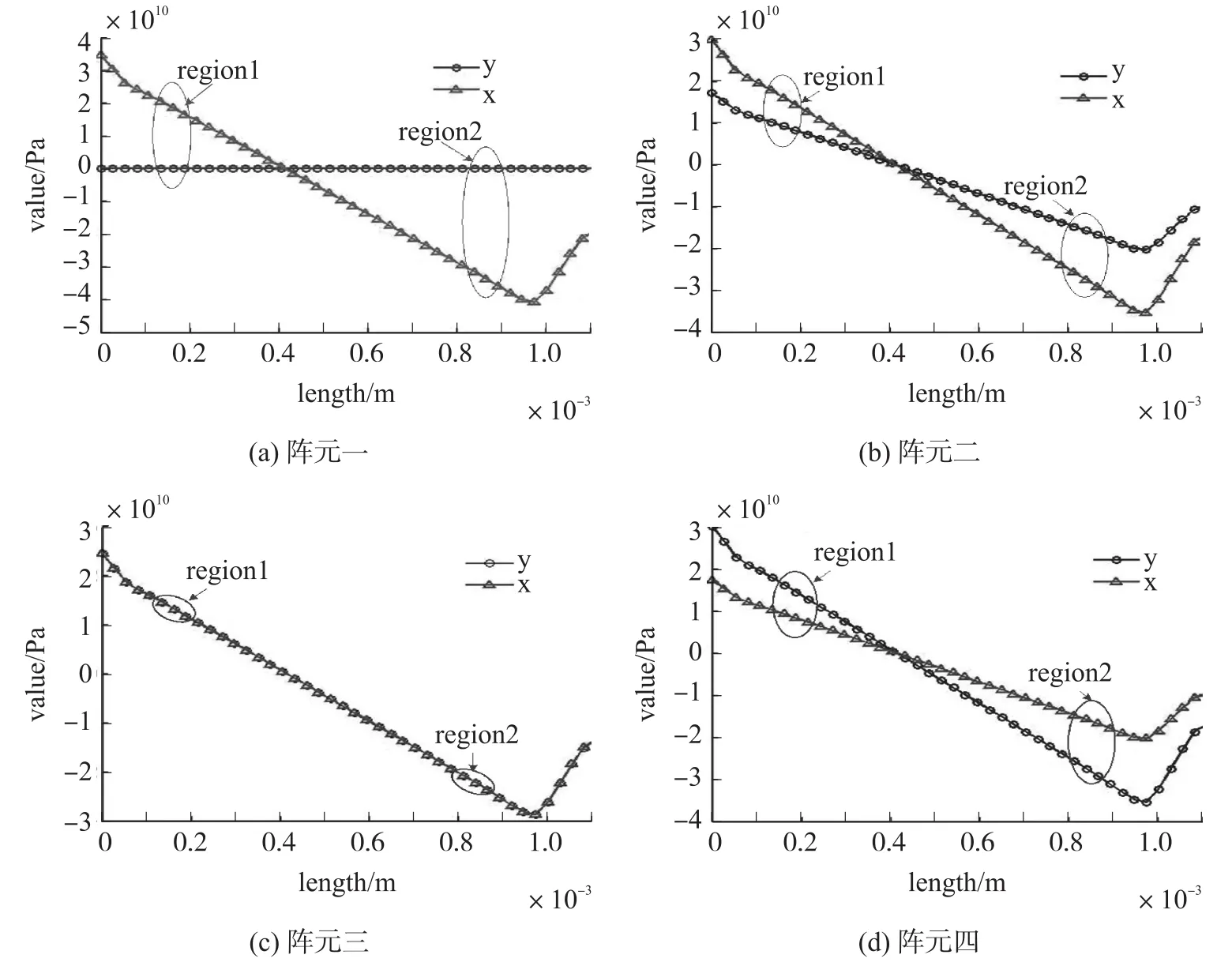
图10 各阵元梁结构应力曲线
在上述路径分析结果中,梁上应力基本呈线性分布且梁两端上的应力最大,但在梁根部受结构设计影响有跳动,在布置压敏电阻时应该避开该区域。因此梁上的压敏电阻应布置在线性区域内。获得各阵元梁结构应力曲线中压敏电阻布置区所受应力平均值,如下表1所示。
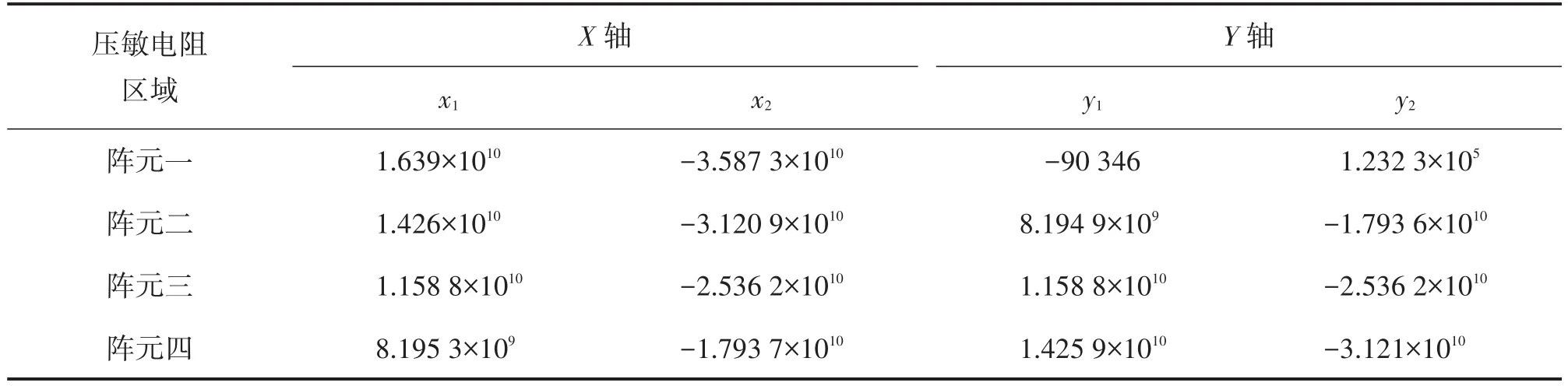
表1 梁结构应力分布
则根据MEMS矢量水听器工作原理,推算等效信号输入角度Θ表达式:

式中,Vx、Vy分别为矢量水听器X路和Y路的输出电压值;x1、x2和y1、y2分别为水听器微结构悬臂梁在X方向和Y方向的应力。由上式可得各阵元等效换算角度在相对坐标系中分别为0°、30°、45°和60°。上述四个角度在绝对坐标系中的共同指向为0°,从而可推算出声源入射方向为沿绝对坐标系中X方向。
3 驻波声场试验
为验证微结构的有效性,对同一支单MEMS矢量水听器在驻波声场中进行不同放置角度的试验测量。矢量水听器校准装置上安装有可精确控制水听器旋转角度的旋钮,其精度为(1/30)°。首先单只水听器在驻波声场中旋转一周,测得X、Y路输出电压最大值和最小值分别为1 930 mV、36 mV、1 910 mV、32 mV。然后将水听器调至X路接收信号最大方向开始进行测量,且以该角度为第四象限阵元测量值,随后对该支水听器分别旋转30°、45°、60°进行测量。测得的接收信号幅值如表2所示。
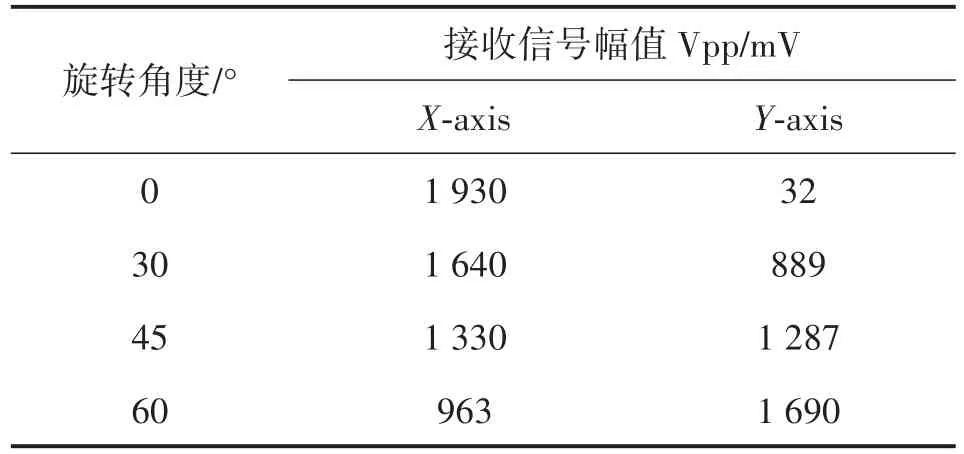
表2 梁结构应力分布
由公式(12)可得各阵元等效换算角度在相对坐标系中的测量值分别为0.95°、28.47°、43.06°和60.32°。由于在实际测量中,水听器接收信号由X最大方向开始旋转测得,因此上述测量值的修正值应分别为0°、30°、45°和60°。经计算,各阵元最大误差为5.1%,四个阵元数据融合后误差为4.3%<5%[22-24]。因此,在误差允许范围内,上述四个角度在绝对坐标系中的指向为0°,试验值与仿真结果一致。
4 结论
本文提出一种新型四元阵型MEMS矢量水听器微结构。利用该微结构制作的矢量水听器工作时相当于四只单矢量水听器同时从4个不同方向获取矢量信息,且采用MEMS工艺一次成型,极大地缩小了阵列尺寸。经仿真与试验验证,该微结构与现有单矢量水听器相比可有效地消除左右舷模糊问题。不足之处,论文中仅对四阵元微结构的定向进行了初步分析,若要计算任意角度及其精度,需后续的数据融合算法进一步研究。
参考文献:
[1]杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009.
[2]Benjamin A.Cray.Kinston W.Acoustic Vector Sensor.United States Patent:US 6370084 B1[P].2002-04.
[3]Howard K R,Kenny T W,Kelly P J,et al.A Microfabricated Elec⁃tron-Tunneling Accelerometer as a Directional Underwater Acous⁃tic Sensor[C]//American Institute of Physics:1995.
[4]Boston University.A Novel Microelectromechanical System (MEMS)Design for an Underwater Acoustic Field Sensor[C]//Acoustical Society of America,1999.
[5]王丛舜,张为斌,方竞,等.微电子机械系统中典型构件的力电耦合分析及其应用研究[J].机械强度.2001,23(4):503-506.
[6]张文栋.共振隧穿仿生矢量水声传感器:China,200610012991.0[P].2007-02-14.
[7]乔慧.共振隧穿仿生矢量水听器的测试技术研究[D].太原:中北大学,2008.
[8]乔慧,刘俊,张斌珍,等.一种新型压阻式硅微仿生矢量水听器的设计[J].传感技术学报,2008,21(2):301-304.
[9]刘源,陈丽红,张国军,等.流体对MEMS矢量水听器共振频率的影响[J].传感技术学报,2014,27(6):758-762.
[10]李振,张丛,刘涛,等.四元阵列MEMS矢量水听器的有限元分析[J].压电与声光,2013,35(6):910-914.
[11]孙贵青,张春华,黄海宁,等.声矢量传感器线阵的左右舷分辨[J].哈尔滨工程大学学报,2010,31(7):848-855.
[12]Allensworth W S,Kenned W C Y,Newhall B K,et a1.Twinline Array Development and Performance in Ashallow-Water Littoral Environment[J].Johns Hopkins APLTeeh Dig,1995,16(3):222-232.
[13]Lemon S G.Towed-Array History,1917-2003[J].IEEE Journalof Oceanic Engineering,2004,29(2):365-37.
[14]何心怡,蒋兴舟,张春华.基于噪声相关模型的二元水听器组左右舷分辨技术研究[J].兵工学报,2004,25(1):90-94.
[15]陈尚.硅微MEMS仿生矢量水声传感器研究[D].太原:中北大学,2008:22-54.
[16]刘庆海,黄见球.表面微机械MEMS温度传感器研究[J].传感技术学报,2015,28(3):325-329.
[17]张国军,陈尚,薛晨阳,等.纤毛式MEMS矢量水声传感器的仿生组装[J].纳米技术与精密工程,2009,7(3):221-227.
[18]Chen S,Xue C Y,Zhang B Z.A Novel MEMS Single Vector Hy⁃drophone[J].ActaArmamentarii,2008,29(6):673-677.
[19]宋小鹏,薛晨阳,张国军,等.高灵敏度宽频带阵列式仿生矢量水听器研究[J].MEMS与传感器,2012,49(12):790-795.
[20]律方成,杨海涛,程述一,等.方形平面阵列的阵元数对局方测向精度影响的仿真分析[J].高压电器,2013,49(7):7-12.
[21]武思君,张锦中,张曙.基于相同阵元数的阵列形式研究[J].哈尔滨工程大学学报,2003,24(2):221-225.
[22]Yang Liufeng,Wang Ting.MEMS Patch Antenna Array with Broadband and High-Gain Double-Layer Silicon Wafers[J].High Power Laser and Particle Beams,2015,27(2):0241291-0241295.
[23]莫世奇.矢量水听器的数据融合研究[D].哈尔滨:哈尔滨工程大学,2007:32-65.
[24]孙进才,严光洪,肖卉,等.平面阵的方位估计算法及其误差分析[J].声学学报,2008,33(3):197-204.
郭 静(1989-),女,硕士研究生,山西省长治人,主要研究方向为MEMS器件及电路设计;

张文栋(1962-),男,教授,博士生导师,“杰出青年基金”获得者。发表学术论文190余篇(SCI、EI收录80余篇)。

张国军(1977-),男,副教授。2015年,获得西北工业大学博士学位,师从著名水声专家杨士莪院士。发表学术论文12篇,其中被SCI收录5篇,EI期刊收录6篇。研究方向为微型机电系统(MEMS)及水声工程,zhangguojun1977@nuc.edu.cn;
Design of Four-Element Array MEMS Vector Hydrophone*
GUO Jing1,2,ZHANG Guojun1,2*,LIU Yuan1,WANG Xubo1,ZHANG Wendong1
(1.Key Laboratory of instrumentation Science and Dynamic Measurement,Ministry of Education,Taiyuan 030051,China;2.Science and Technology on Electronic Test and Measurement Laboratory North University of China,Taiyuan 030051,China)
Abstract:To solve the existence problem of port/starboard blur when using single MEMS vector hydrophone,a new four-element array MEMS vector hydrophone microstructure has been presented.Firstly,the cause of port/starboard blur of the current MEMS vector hydrophone was analyzed theoretically and a novel four-element array microstruc⁃ture was proposed,which can solve the problem of port/starboard blur.Secondly,the function of novel microstruc⁃ture was verified through finite element method,which shown that the direction of sound source could be ascer⁃tained accurately.Finally,environmental test wasdone using the standing wave tube,and the results show that the four-element array microstructure can help to deal with the challenging of port/starboard blur.
Key words:MEMS;port/starboard blur;Ansys;vector hydrophone
doi:EEACC:2575D10.3969/j.issn.1004-1699.2016.02.004
收稿日期:2015-03-03修改日期:2015-11-24
中图分类号:TB565.1
文献标识码:A
文章编号:1004-1699(2016)02-0171-06
项目来源:应用于海底长期观测网的纳机电矢量水听器项目(2013AA09A412);基于纳机电矢量水听器面阵的水下目标成像机理技术研究项目(61127008/F040703)