基于激光测距的高速公路车辆宽高检测系统
2016-04-20 02:50山西省自动化研究所赵金婵
电子世界 2016年6期
关键词:激光测距
山西省自动化研究所 赵金婵
基于激光测距的高速公路车辆宽高检测系统
山西省自动化研究所 赵金婵
【摘要】本文基于激光测距技术设计了一种高速公路车辆宽高检测系统。该系统由激光扫描器、嵌入式工控机及上位机软件构成,实现了车辆宽高尺寸的不停车检测。经现场测试,系统具有测量精度高、速度快、误差小等优点,可以取代传统人工测量,提升高速公路治超工作的自动化与信息化水平。
【关键词】激光测距;公路超限治理;车辆宽高检测
0 引言
交通运输既是国民经济的基础产业,又是推动国民经济发展和社会进步的基础条件,尤其是高速公路运输,在各种运输方式中所占的比重越来越大。随着公路交通运输的快速发展,受经济结构和利益驱动的双重影响,一些运输业主之间为了片面追求利润而无序竞争,导致一段时间内出现了普遍的超限运输现象。超限运输危害巨大,严重破坏了公路基础设施,缩短了公路的使用寿命,同时给交通安全带来极大的事故隐患,因此,遏制超限运输刻不容缓。遏制超限超载车辆的关键是准确的测量出车辆宽高的实际尺寸,目前对车辆宽高的测量主要采用人工测量的方式,工作效率低、安全风险大,已不满足于自动化检测的需要。基于此,设计一种高速公路动态车辆宽高检测系统,对实现治超工作自动化和信息化具有重要的现实意义。
1 系统结构设计

图1-1 系统结构图
图1-1所示,本系统主要分为三部分,分别是:激光扫描器、嵌入式工控机以及上位机软件。激光扫描器放置于外场车道的上空,实现对被测车辆的动态扫描,获取距离信息;嵌入式工控机实现对激光扫描器的参数设置、行为控制及数据传输;上位机软件安装在嵌入式工控机内,实现对测量数据的计算、处理及人机界面显示;数据的存储借助于嵌入式工控机提供的硬盘空间;本系统测量数据可传输至上级信息系统作为交通信息决策判断的基础数据。
2 硬件设计
本系统的硬件设计主要包括激光扫描器的选型、嵌入式工控机的软硬件需求分析及系统间通信方式设计。
2.1 激光扫描器的选型
本系统根据高速公路超限检测站的工作条件对激光扫描器进行选型,采用SICK AG公司的脉冲激光测距扫描仪LMS-1XX。激光扫描器放置在车道中心线距地面约6m的位置,采用成熟的激光-时间飞行原理,加入先进的多次回波检测技术,通过非接触式脉冲激光测距,将扫描产生的距离信息转化为车辆宽高尺寸。检测高度为1.2m~6m;检测宽度为1.5m~5m;测量距离最大18m;扫描角度最大270°;工作频率有25Hz和5Hz两种;设备测量误差<0.4%;工作电压为24V DC;防护等级达到IP67,满足高速公路治超站露天使用要求。
2.2 嵌入式工控机的软硬件需求
嵌入式工控机作为系统的核心处理单元,实现测量系统的独立运行,提高了系统的模块化程度。在硬件方面:嵌入式工控机的CPU主频需要达到1GHz以上;硬盘存储空间≥500G;内存≥2G;并要求至少具备2个RS232串口、1个以太网口,以满足测量单元与控制单元的数据传输要求。软件方面:嵌入式工控机需配备Windows XPSP3以上系统及Microsoft .NET Framework 4.0平台,以满足上位机软件工作环境。工控机选用FUSHENGTEK的工业BOX,如图2-1所示。

图2-1 系统嵌入式工控机
2.3 模块间通信方式
本系统模块间通信主要是激光扫描器与嵌入式工控机之间的控制信号传输与数据上传。激光扫描器布置在车道,嵌入式工控机一般放置在治超服务器机柜中,两者距离在70m左右,故采用TCP/IP的方式实现通信。嵌入式工控机内的历史数据向上级信息系统传输方式取决于现场实际情况,系统设计预留了RS232、RS485、TCP/IP等几种主流的通信方式。
3 软件设计
系统软件设计主要涉及两部分:(1)激光扫描器的工作流程;(2)上位机的工作流程。
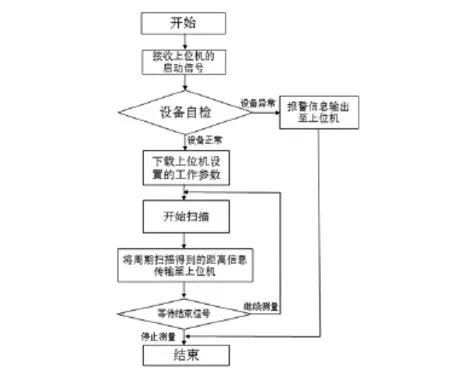
图3-1 激光扫描器的工作流程
3.1 激光扫描器的工作流程如图3-1所示,激光扫描器接收上位机提供的启动信号,协议为ASCII格式的“
3.2 上位机的工作流程
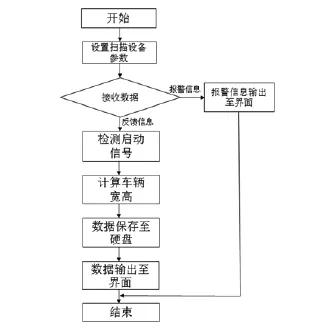
图3-2 上位机的工作流程
如图3-2所示,上位机首先设置激光扫描器参数,扫面频率有2550Hz可选,扫描角度为0~270°,敏感高度设置为1m可以有效过滤车道干扰。接收测量单元上传数据,判断是报警信息或反馈信息,报警信息直接输出至界面并停止本次测量,反馈信息则表示测量设备已初始化完毕。接着检测启动信号,该信号可以是车道现有的光栅、线圈等设备检测车辆进入测量区域,也可以由激光扫描器直接检测触发。设备启动后自动接收测量数据,并计算车辆宽高尺寸,数据处理方法如图3-3所示。激光扫描器形成的扫描面为三角形,图中斜边的长度代表测量数据data,通过当前角度信息可以转换为三角形的两个直角边长度,分别为激光扫描器距被测物体的距离h1以及被测物体的宽度w1及宽度w2。扫描器安装高度h2-h1为被测物体高度H,w1+w2为被测物体宽度W,车辆在前进的过程中,系统可以实现动态测量。高度H及宽度W存储至工控机硬盘并输出至界面。
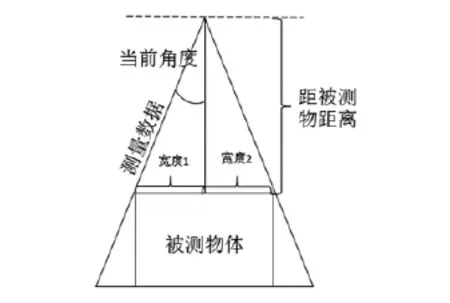
图3-3 数据处理方法示意图
4 系统测试
嵌入式工控机系统采用Windows XP SP3系统及Microsoft .NET Framework 4.0平台,测试地点为高速公路治超站,系统界面如图4-1、图4-2所示。
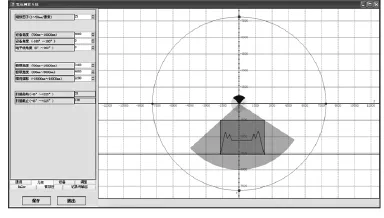
图4-1 车辆宽高测量界面
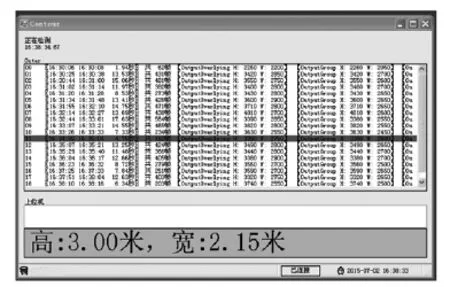
图4-2 测量结果输出界面
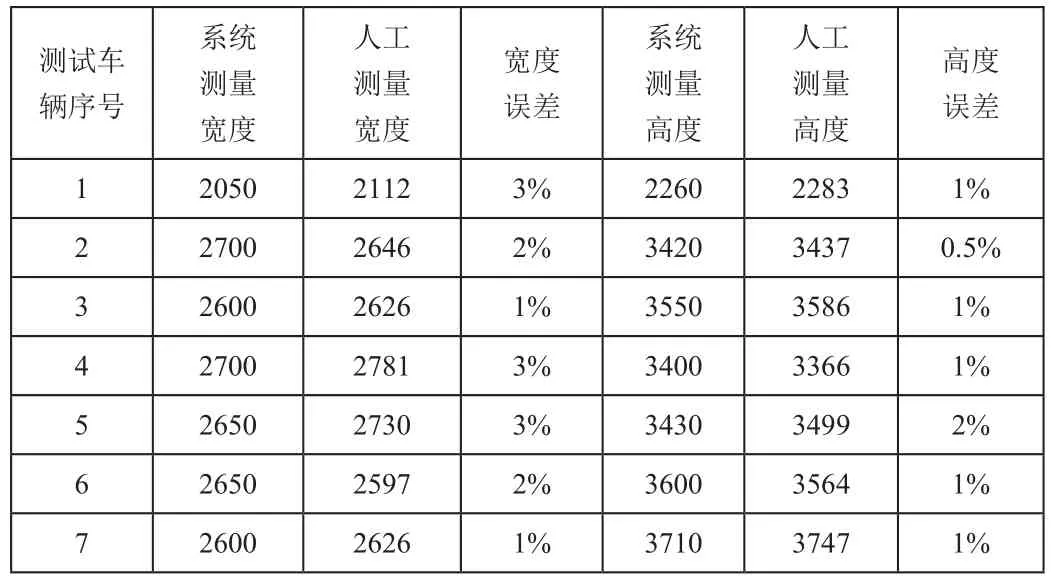
表4-1 系统测试数据与人工测量数据对比
表4-1对部分系统测试数据及相对应的人工测量数据做了对比,验证了本系统的测量误差控制在3%以内。本系统能够满足高速公路治超工作相关规定的要求。
5 结论
本文对基于激光测距的高速公路车辆宽高检测系统的结构设计、硬件选型及软件流程设计做了详细阐述说明并进行了测量结果分析。根据相关数据分析结果,本系统的测量速度、数据准确度均满足超限检测工作的要求,可以代替传统人工检测方式,提高高速公路超限检测系统的自动化与信息化。
参考文献
[1]王建聪,毛保华.车辆超限超载的危害性与治理对策研究[J].中国安全科学学报,2004,14(11):53-56.
[2]姜庆昌.汽车轮廓尺寸测量机的研究[D].哈尔滨工业大学,2006.
[3]李密,宋影松,虞静等.高精度激光脉冲测距技术[J].红外与激光工程,2011,40(8):1469-1473.
[4]郭达志,周丙申.激光测距仪[M].北京:煤炭工业出版社,1978:230~254.
[5]姜庆昌,王冬,石望远等.基于光电跟踪技术的汽车轮廓尺寸测量机的研制[J].机械工程师,2008,(5):79-80.
赵金婵(1963-),女,山西太原人,2013年毕业于中北大学,工程师,现工作于山西省自动化研究所,研究方向:信息技术研究。
作者简介:
基金项目:2015年度山西省科技攻关项目“基于轮廓检测的绿通车智能识别系统”(项目编号:2015031005)。
猜你喜欢
通信电源技术(2018年5期)2018-08-23
现代电子技术(2017年22期)2017-11-18
制导与引信(2017年3期)2017-11-02
山东工业技术(2017年17期)2017-09-13
山东工业技术(2017年16期)2017-09-05
中国科技纵横(2017年14期)2017-08-17
电脑知识与技术(2016年7期)2016-05-19
现代电子技术(2015年19期)2015-10-22
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31