摄像头图像软件二值化的研究
2016-04-18 05:34:56蒙建源胡玲艳大连大学信息工程学院
电子制作 2016年24期
蒙建源 胡玲艳 大连大学信息工程学院
摄像头图像软件二值化的研究
蒙建源 胡玲艳 大连大学信息工程学院
在“恩智浦”杯全国大学生智能车竞赛中摄像头组识别路径的过程中,为了能够正确的提取到赛道信息,减少单片机计算量,提升处理速度,需要对摄像头采集到的图像进行二值化处理,从而降低图像的复杂度,在单片机主频不变的条件下增加赛道识别的速度。而一个简单快速得到图像二值化阈值的算法能显著的提升图像处理的速度。
智能车;图像处理;软件二值化
引言
在“恩智浦”杯全国大学生智能车竞赛中,智能车的巡线技术一直是保证智能车正确行驶的核心技术之一。摄像头组作为长期以来智能车竞赛的三大组别之一,它通过摄像头作为传感器采集赛道信息,再实时通过算法处理提取到当前车子所处位置从而能够自主寻迹。而在处理图像时,往往因为图像数据量巨大因此不能直接使用摄像头采集到的赛道图像进行识别,而是首先需要对图像进行二值化处理,降低图像的复杂度,同时也能大幅降低图像识别时的计算量[1-3]。本文根据“大津(Otsu)法”研究简化的摄像头软件二值化处理方法,并使用MATLAB编写上位得到图像处理结果。
灰度图:把白色与黑色之间按对数关系分为若干等级,称为灰度。使用灰度来表示颜色的图像称之为灰度图。
二值图:二值图像是指每个像素不是黑就是白,其灰度值没有中间过渡的图像。本文在二值图中使用0表示黑色,1表示白色。

图1 原始灰度图
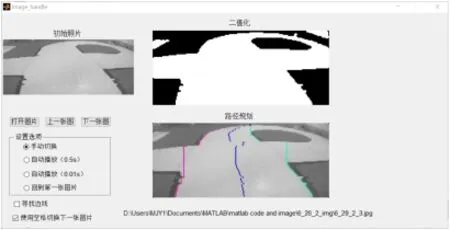
图2 二值化后图
1.大津 (Otsu) 法分析
大津算法也称为最大类间方差法,有时也称之为Otsu法,由日本学者大津于1979年提出,被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响,因此在图像处理上得到广泛的应用。它是按图像的灰度特性,将图像分成背景和前景两部分。因方差是灰度分布均匀性的一种度量,背景和前景之间的类间方差越大,说明构成图像的两部分的差别越大,当部分前景错分为背景或部分背景错分为前景都会导致两部分方差变小。因此使类间方差最大的分割意味着错分概率最小。
2.大津 (Otsu) 法的计算
对于图像I(x,y),设初始t=为整幅图像的阈值,L为图像的灰度等级,图像的总像素为N。因此,由t可把图像分割成[0,t],[t+1,L-1]两个区域,分别命名为区域1和区域2,ni为第i个灰度值所拥有的像素数量。
设区域1和区域2分别占整个图像的面积比θ1与θ2分别为:

在得到整幅图像的阈值之后,只需要对图像进行一次简单的遍历:当当前像素值小于阈值的时候令它为0(黑色),否则令它为1(白色)。这样对整幅图像遍历一次之后就能把一副灰度图转换为一幅二值图。
在MATLAB使用GUI编写的上位机上显示原始灰度图与二值化之后的图像对比效果:
3.结语
智能车路径识别过程中,图像信息的快速准确的处理是小车高速、平稳运行的先决条件。本文针对小车运行中的软件二值化问题,使用大津法进行处理得到图像阈值从而得到图像的二值图减少了单片机是运算压力,通过软件仿真以及实际应用都表明这确实能够快速稳定的处理摄像头实时拍摄的图像并得到二值图。并且这套算法计算简单不受亮度和对比度的影响,不只是适用于智能车,在实际生产过程中,需要二值图的场合下都有比较强的适用性。
[1]刘成龙.精通MATLAB图像处理[M].清华大学出版社,2015.
[2]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北航出版社,2007.
[3]曹丰等.第十届“飞思卡尔”杯智能车竞赛技术报告,2015.
胡玲艳(通讯作者)(1978-),女,河北沧州人,副教授,主要从事智能控制/先进工业过程控制系统设计工作。
地方高校国家级大学生创新创业训练计划项目(201611258059),大连大学特色专业建设项目。
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
公民与法治(2022年4期)2022-08-03 08:20:24
走向世界(2022年3期)2022-04-19 12:38:58
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
小哥白尼(趣味科学)(2020年6期)2020-05-22 06:43:14
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
电子制作(2018年18期)2018-11-14 01:48:20
空中之家(2017年11期)2017-11-28 05:28:21
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
中国公共安全(2017年8期)2017-10-13 08:12:21