深海垂直剖面潜标控制系统设计
2016-04-17 19:36蒋平熊莉利
海峡科技与产业 2016年4期
蒋平 熊莉利
摘 要:设计并实现了一种基于STM32嵌入式系统的深海垂直剖面潜标的控制系统,通过合理的功能分配、可靠的硬件设计和高效的软件实现,使整个控制系统具有低功耗、高可靠的特点。实验数据表明,该控制系统实现了对潜标的自动下潜、定点测量、应急上浮等状态控制,完成了对深海垂直剖面海洋要素的实时监测。
关键词:STM32;控制系统;实时监测
0 引言
对于深远海区的海洋监测而言,获取温、盐、深和海流等动力参数是开展海洋开发研究与军事海洋学研究的重要基础。海洋环境监测和资源调查中,经常需要对海洋动力环境进行长期、定点、实时、立体监测,进行海洋水体中不同剖面参数(如温度、盐度、流速和光学特性量)的测量,并具备在恶劣环境下实现无人值守的全天候长期连续定点观测的能力。传统的海洋监测平台,需要建立海洋观测站,或通过海洋调查船来投放并保证运行,需要大量的人力、物力和财力。而传统的海洋监测潜标,通常只能采用多个传感器在离散的几个层次上采样,不能实现连续剖面观测,系统运行、维护的成本高,回收难度较大。
深海垂直剖面潜标是一种具备自动升降功能的新型海洋监测系统,采用浮力调节方式控制平台升降,可沿系留钢缆任意移动、进行剖面温度、盐度、海流数据的长时、循环采集,可根据需求搭载温、盐、深、海流等多种传感器,同时可通过扩展接口,利用水声通讯机、卫星通讯进行数据的实时传送。这种新型潜标突破了传统潜标使用的温盐链,用单一平台就可以实现全通道的数据监测,实现大深度(1500m)、长时间(不少于1年)、多剖面(200个剖面)的观测数据的采集和存储,大大降低了潜标观测的使用成本,是一种高效、全天候的无人值守海洋环境观测系统。深海垂直剖面潜标系统为区域性海洋立体监测系统提供一种高效、经济、安全、隐蔽的测量方法,在我国海洋学研究、军事海洋学研究、海洋工程建设领域具有良好的应用前景,大大提高我国的海洋观测能力。
1 系统组成
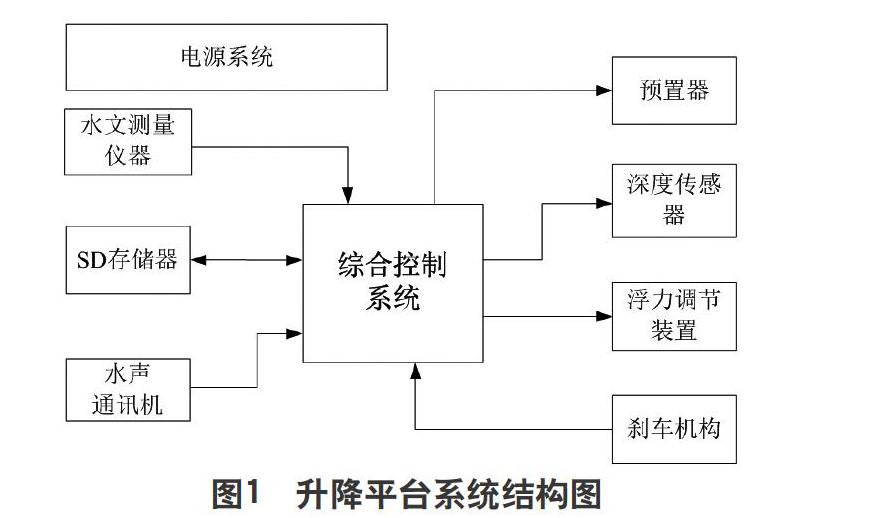
在深海垂直剖面潜标系统中,升降平台是整个系统的“中枢”,为了进行大深度、长时间、多剖面的海洋数据观测,以及大容量的数据采集和实时传输,实现可靠、稳定和低功耗的工作。升降平台上主要的功能组件有:综合控制系统、浮力调节装置、刹车机构、水声通讯机、预置器、水文测量仪器、深度传感器、SD存储器等,以及为整个平台提供能源的电源系统,其系统结构图如图1所示。
2 综合控制系统功能
根据升降平台系统结构,潜标综合控制系统应具备的功能如下:
(1)根据预置器预置的工作参数,进入相应的工作流程;
(2)根据深度传感器数据来判断所处的海区深度,作为切换潜标升降模式切换、调节浮力和调整潜标在垂直剖面上运行速度的依据;
(3)控制浮力调节装置,通过驱动浮力调节电机转动方向和电磁阀通断来调整整个潜标系统的浮力配置,实现潜标升降模式和速度调节;
(4)控制刹车机构,使潜标悬停在指定的剖面;
(5)设置和使用水文测量仪器,接收并存储测量仪器采集到的海洋监测数据;
(6)与SD存储器进行大容量的数据交换;
(7)通过与水声通讯机数据交换,将海洋监测数据和潜标工作数据实时传输到主浮体,再通过卫星终端转发至岸站系统,实现数据的实时传输。
3 硬件电路设计
根据综合控制系统应具备的功能,按其所需的硬件电路功能划分,包括嵌入式芯片电路、通信电路和驱动电路。
嵌入式芯片电路是整个综合控制系统的中枢,选用的是应用较为成熟的STM公司的STM32F107嵌入式芯片,该型拥有5个可编程USART和2个16通道12位的AD转换器,自带SPI、CAN等总线接口,并支持在线编程和调试,为综合控制系统外围电路提供了充足的硬件资源,加上其高性能、低功耗的特性,完全满足综合控制系统的使用需求。
驱动电路包括“电机驱动”和“控制驱动”两个部分。“电机驱动”电路部分的功能是对潜标浮力调节装置和刹车机构所使用到的电机进行驱动,为降低综合控制电路的复杂程度、确保电机长时间工作的可靠性,该部分根据电机的功能特性,选用了瑞士MAXON公司成熟的电机驱动器集成模块方案——“EPOSE2 70/10”电机智能位置控制单元,该型电机驱动模块在其额定功率下可驱动多种DC和EC电机,能可靠实现电机数字式“位置、速度、电流/转矩”控制,是电机驱动理想的选择。
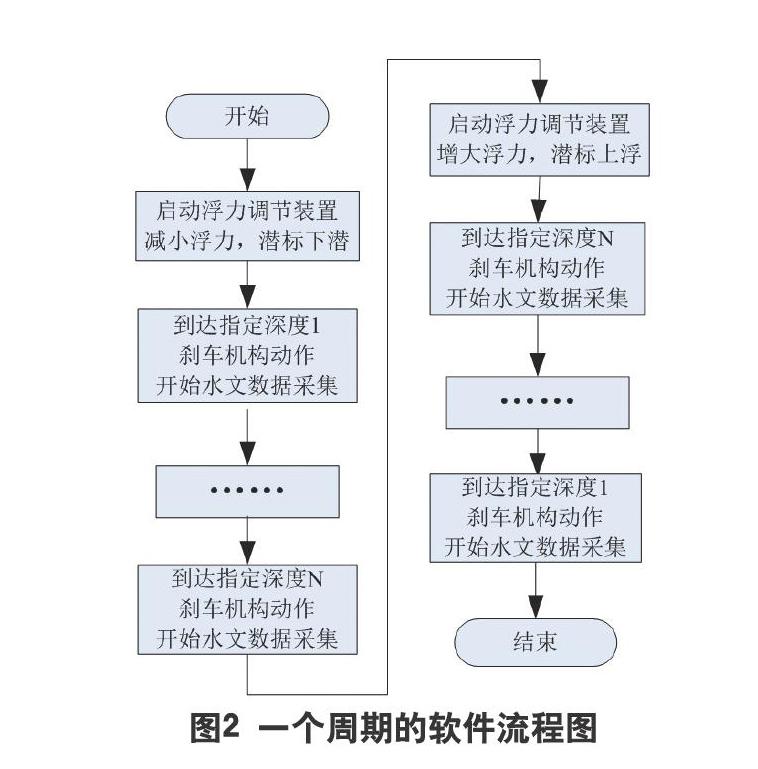
4 系统软件实现
综合控制系统软件采用C语言编写,编译环境为KEIL UVISION 4,在软件实现方面,因为基于STM32的嵌入式芯片是面向应用层的成熟芯片,具有功能齐全的库函数,因此在USART通信、AD转换、SPI等软件接口均可直接调用库函数,经过简单的配置就可实现软件功能,在SD存储等可通过“IFAT”函数移植,同时,可以通过移植“uC/OS2”等嵌入式實时操作系统来进一步提高软件效率。
5 试验结果
试验结果表明,综合控制系统经过长时间多个剖面的工作,工作水深200到1700米,满足潜标平台工作水深指标,在综合控制系统的作用下,浮力调节装置、刹车机构等执行机构以及水声通讯机、水文测量仪器等设备工作正常、可靠,未出现故障,整个潜标系统按既定流程垂直上浮、下潜,同时进行有效的水文数据采集和水声通讯传输,可有效进行海洋监测,满足深海垂直剖面潜标的系统设计需求。
6 结束语
随着我国海洋科研的发展,我国海洋科研对往复式温盐流剖面仪的需求将不断增长,不仅仅在的近海和大洋观测,还将在海洋、气象、气候、海军、石油、航运等行业发挥重要的作用。
参考文献
[1] 刘素花,龚德俊,等.基于单片机的海洋环境监测系统的控制电路设计[J].海洋科学.2009.(8):67-71.
[2] 邓云,姜飞,等.实时传输潜标平台中的深海海流观测系统设计[J].气象水文海洋仪器.2012.12:69-72.
猜你喜欢
吉林农业·下半月(2016年12期)2016-12-26
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年21期)2016-10-17
科技视界(2016年3期)2016-02-26