
GPS/INS深组合技术及其应用*
2016-04-08 01:44周坤芳任卓谊
舰船电子工程 2016年1期
周坤芳 任卓谊
(海军陆战学院 广州 510430)
GPS/INS深组合技术及其应用*
周坤芳任卓谊
(海军陆战学院广州510430)
摘要分析GPS/INS深组合结构,研究INS信息辅助GPS接收机基带环路技术,仿真研究GPS/INS深组合模式特性,其具有提高接收机动态适应能力、抗干扰能力、伪距测量精度等特性,拓展了卫星导航的应用范围。随着BDS具备亚太区域导航能力,鉴借GPS/INS深组合技术,分析BDS/INS深组合中的若干技术问题,以供相关人士研究参考。
关键词GPS/INS深组合; 组合特性; 组合技术; BDS/INS组合应用
Application of Modular Technology of Tightly-coupled GPS/INS
ZHOU KunfangREN Zhuoyi
(Naval Academy of Arms Command, Guangzhou510430)
AbstractIt analyzes tightly coupled GPS/INS model portfolio composition, researches the GPS signal acquisition and tracking technologies with INS, simulation research tightly coupled GPS/INS mix of features. It has high anti-interference capability, high-precision measurement of pseudo-range and high capacity of navigation and positioning. It broadens application of satellite navigation. With application of the BDS system, learning from technology tight coupling of GPS/INS, it explores deep BDS/INS portfolio in several key technical issues related to the purpose for the navigation system in the development of reference.
Key Wordstightly-coupled GPS/INS, modular characeristics, modular technology, application of tightly-coupled BDS/INS
Class NumberU666
1引言
随着导航技术在航空航天等军事领域的广泛应用,对导航系统准确性和可靠性的要求也越来越高,任何单一的导航形式有着各自的独特性和局限性,已经不能完全满足系统导航需求,不同导航系统组合,多信息源互相补充,可以达到更好的导航效果。GPS/INS组合导航系统,特别GPS/INS深组合被认为是目前组合导航领域较为理想的一种组合方式[1~3]。
2GPS/INS深组合结构[1,3~4]
GPS/INS组合一般分为三种:松组合、紧组合和深组合。松组合和紧组合是一种软件形式的组合,分别将GPS输出的位置、速度信息和伪距、伪距率信息同INS解算结果进行数据融合,利用卡尔曼滤波器产生各导航参数的误差修正量,通过输出或反馈校正INS,达到改善INS精度的目的。深组合是将GPS/INS进行软硬件一体化设计,将GPS接收机基带、导航解算与INS的导航解算进行整体化设计,利用GPS接收机的输出信息去辅助INS的同时,将短时高精度的INS速度、加速度信息,提供给接收机的基带环路,为GPS接收机的信号捕获、跟踪提供辅助,提高接收机的灵敏度、消除环路的动态特性影响、减小多路径效应,提高组合导航的定位精度。GPS/INS深组合方式在高动态、强干扰、多路径效应严重等多种恶劣环境中仍然能够体现较为优异的性能,它是组合发展的一个重要方向,如图1所示。
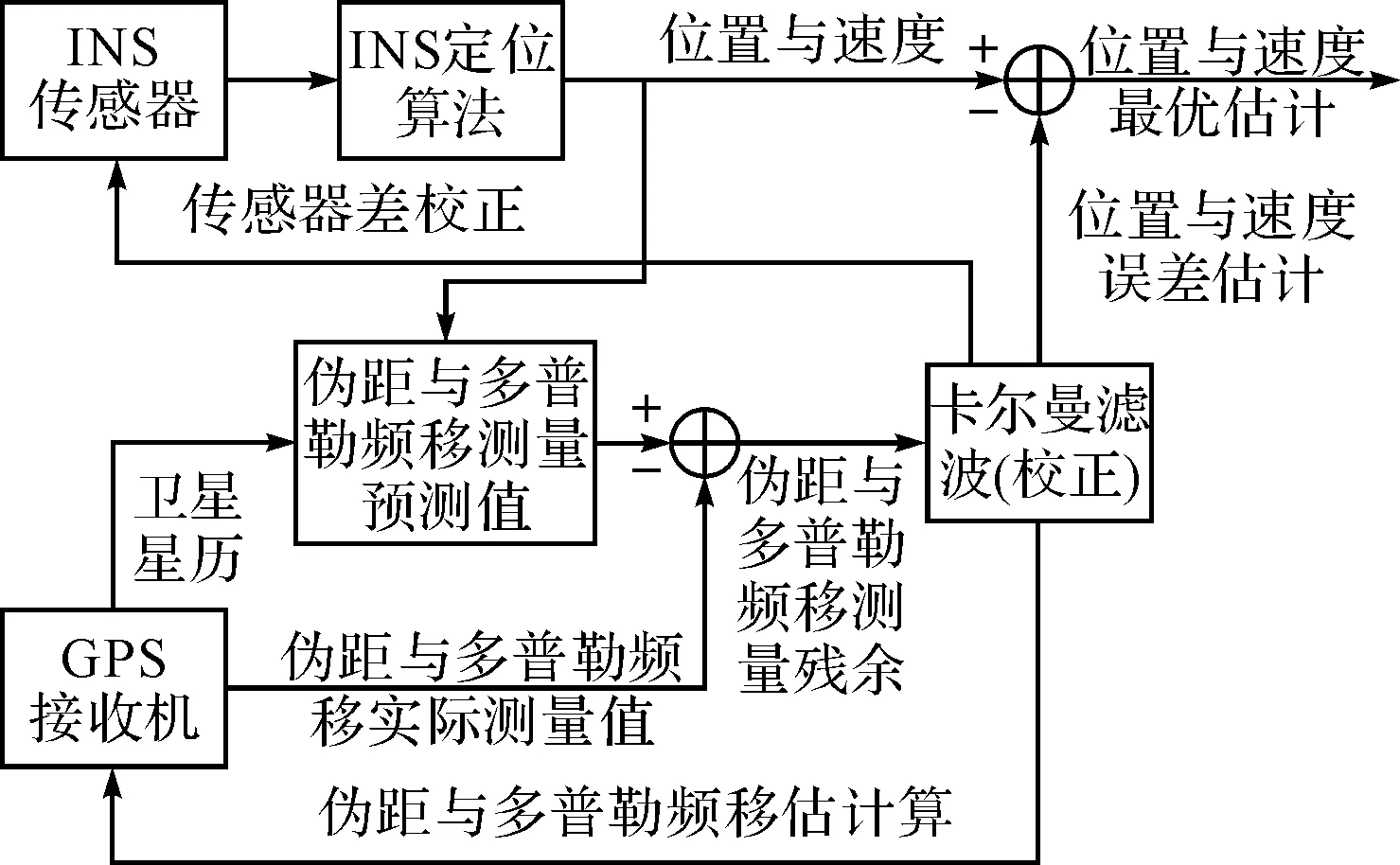
图1 深组合GPS/INS组成方框图
3GPS/INS深组合技术
GPS/INS深组合主要是将惯性信息引入GPS接收机的基带环路,辅助卫星信号的捕获与跟踪,以提高接收机导航性能。
3.1惯性辅助GPS捕获技术
惯性辅助捕获主要针对解决GPS信号的快速捕获和失锁重捕两方面问题,旨在缩小搜索范围,加快捕获速度,提高接收机的捕获性能[4~5]。通过惯性测量的载体速度、姿态信息,经过坐标转换计算得到粗略的多普勒频移和码相位估计,可以减少信号二维搜索的空间,减小捕获时间,并利用坐标转换后的载体加速度信息为相干积分时间提供频率误差和码相位误差修正,使得捕获时的相干积分时间可以尽量长,提高捕获的灵敏度。
在惯性辅助下的GPS接收机中,载波信号多普勒频率[4,6]:
(1)

利用惯性导航解算得到当前历元时刻载体位置和速度信息,结合卫星星历数据解算得到卫星的位置、速度信息,计算得到载体至卫星视线方向的单位矢量和伪距信息,从而得到视线方向上的多普勒频移和码相位偏移,以此作为搜索范围的中心,并根据惯性解算位置和速度信息的不确定度来设定搜索范围,控制本地码/载波数控振荡器在此范围内进行搜索,从而缩短GPS接收机信号捕获的时间,提高GPS信号捕获的性能。
在接收机对卫星信号的捕获过程中,利用惯性提供的载体位置信息结合获得的GPS历书数据,帮助获得可视卫星状况。若受到阻碍物遮挡或过大的动态应力出现信号失锁时,运用惯性辅助信息计算出多普勒频率和码相位的变化情况,重新设定搜索中心频率,提高预测的精确度,缩小搜索范围,提高重捕速度。
3.2惯性辅助GPS跟踪技术
GPS接收机通过载波辅助码跟踪延迟锁相环(DLL),使得码跟踪环相对于载波跟踪环更加稳定,通常惯性辅助GPS载波跟踪环[5~6]。利用惯性导航解算出的位置、速度信息和GPS星历数据解算得到的卫星位置和速度信息,计算并预测载体至卫星视线方向上的多普勒频移信息,与载波环的环路滤波器输出值相加,将结果反馈至载波NCO中,控制载波频率的输出,使载波维持在锁定状态,再对其跟踪结果进行码跟踪。
在惯性辅助下,本地同相、正交信号可表示[5]:
cos(tn)=cos[2π(fIF+fdopp)tn+φPLL(tn)]
sin(tn)=sin[2π(fIF+fdopp)tn+φPLL(tn)]
(2)
式中:fdopp表示INS估计的多普勒频移,可通过式(1)进行计算。
本地产生的同相、正交载波信号分别与GPS中频信号相乘,实现载波剥离功能;根据环路滤波器输出的频率误差和惯性估计的多普勒偏差,不断调整复现本地信号的参数,实时调节载波NCO,以实现对输入GPS信号的稳定跟踪。
4GPS/INS深组合特性
通过惯性辅助信息,改变信号动态特性及接收信号的信噪比,改进跟踪回路能力,提高接收机动态适应能力、弱信号检测能力、抗干扰能力、伪距测量精度等。
4.1提高接收机动态适应能力
惯性辅助下GPS接收机,载波环路跟踪误差、信号信噪比及惯性的性能指标关系[6]:
(3)
式中:c/n0为噪声功率密度比,T为预检积分时间,Bn为环路等效噪声带宽,λL为载波长,α=Bn/ωn,ωn为环路自然频率,ΔfINS表示多普勒误差。
通过惯性测量多普勒误差,并引入到接收机载波跟踪环路,使得接收机动态性能取决于惯性性能,从而消除来自跟踪环的动态应力,动态引起接收机跟踪误差取决于外部惯性元器件质量。惯性加速度计通常能感测高达1.0kHz速率的速度变化,其导航解的输出速率通常高于GPS接收机1~2个数量级。在GPS/INS深组合中,高速率的惯性速度信息辅助,使接收机跟踪环可以在窄噪声带宽上运行,从而提高了接收机动态适应性。
4.2提高接收机弱信号检测能力
通过多普勒频移估计值为跟踪环路提供频率补偿,对积分过程中的载波多普勒频率进行修正,使得多普勒频移估计误差为零,经过积分的I、Q支路数据表示[5,7]:


(4)
在进行预检测积分的过程中,没有多普勒频率误差的影响,I、Q将完全反映全部的信号功率,利用加长预检测积分时间将可以实现对信号能量的累积,通过提高信号处理增益来实现对更弱信号的跟踪。
4.3提高接收机抗干扰能力
通过惯性引入多普勒频移,估计出载体的动态,消除跟踪环路中的动态应力误差,加快载波环路的响应速度,减小环路跟踪误差,在保证信号跟踪的前提下,有效降低环路带宽,提高接收机抗干扰能力。
干扰对GPS接收机的根本影响是降低C/N0,而C/N0的降低将直接影响GPS接收机的抗干扰能力,通常采用干信比(J/S)衡量GPS接收机的抗干扰能力[8]。
(5)
若采用典型的1海里/小时惯导的速度辅助,INS/GPS紧耦合模式,载波环带宽Bn可从18Hz减小到2Hz,深组合模式,载波环带宽Bn可减小到0.8Hz。当把载波环带宽降低到2Hz和0.8Hz,则CostalPLL跟踪门限大约处于18.5dB-Hz的[C/N0]eq值和16.5dB-Hz上[8],则惯性辅助下接收机J/S与C/N0变化如图2所示。
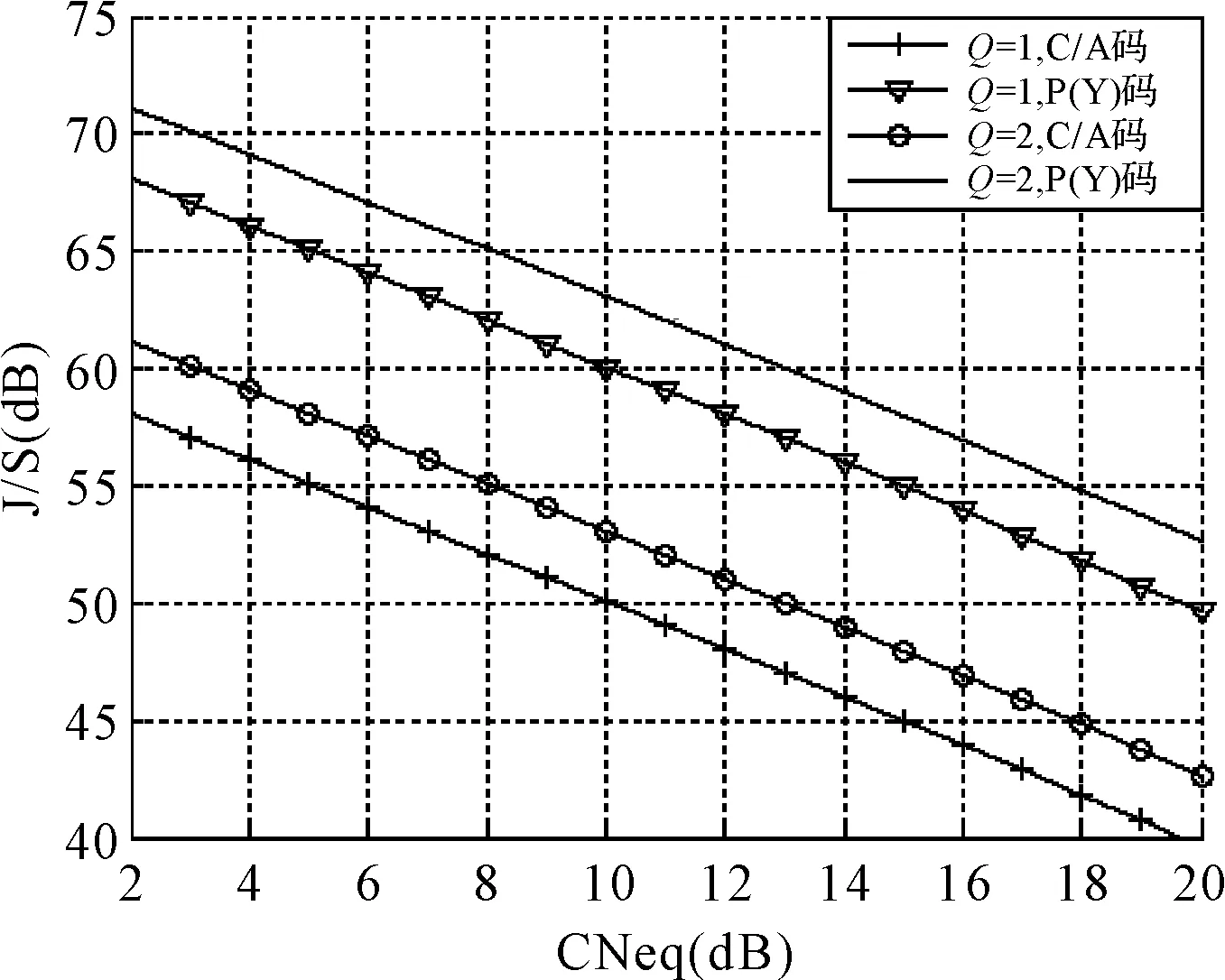
图2 INS辅助下接收机J/S与C/N0关系
从图2可以看出,无论对于窄带干扰,还是宽带干扰,GPS/INS深组合模式比紧耦合模式,接收机抗干扰能力提高4dB左右。
4.4提高接收机伪距测量精度
采用惯性辅助GPS接收机跟踪环路消除动态应力误差,降低码延迟跟踪环带宽,改善接收机伪距测量精度。
以载波噪声功率比(C/N0)为基础,伪距测量的方差公式如下[8]:
(6)
在实际工作过程中,由于C/N0的取值较BDLLBID大的多,所以BDLLBID8d3/(C/N0)2项近似为0,故式(6)可以简单化为
(7)
从式(7)可见,σpr是BDLL、C/N0的函数。
假设数字GPS接收机相关器的d=1/2,码片长度C/A码为293.26m,P(Y)码为29.326m,则不同C/N0下的GPS接收机伪距测量方差σpr、DLL噪声带宽BDLL关系如图3所示。相同C/N0条件下,接收机伪距测量方差σpr随着DLL噪声带宽BDLL的减小而减小。
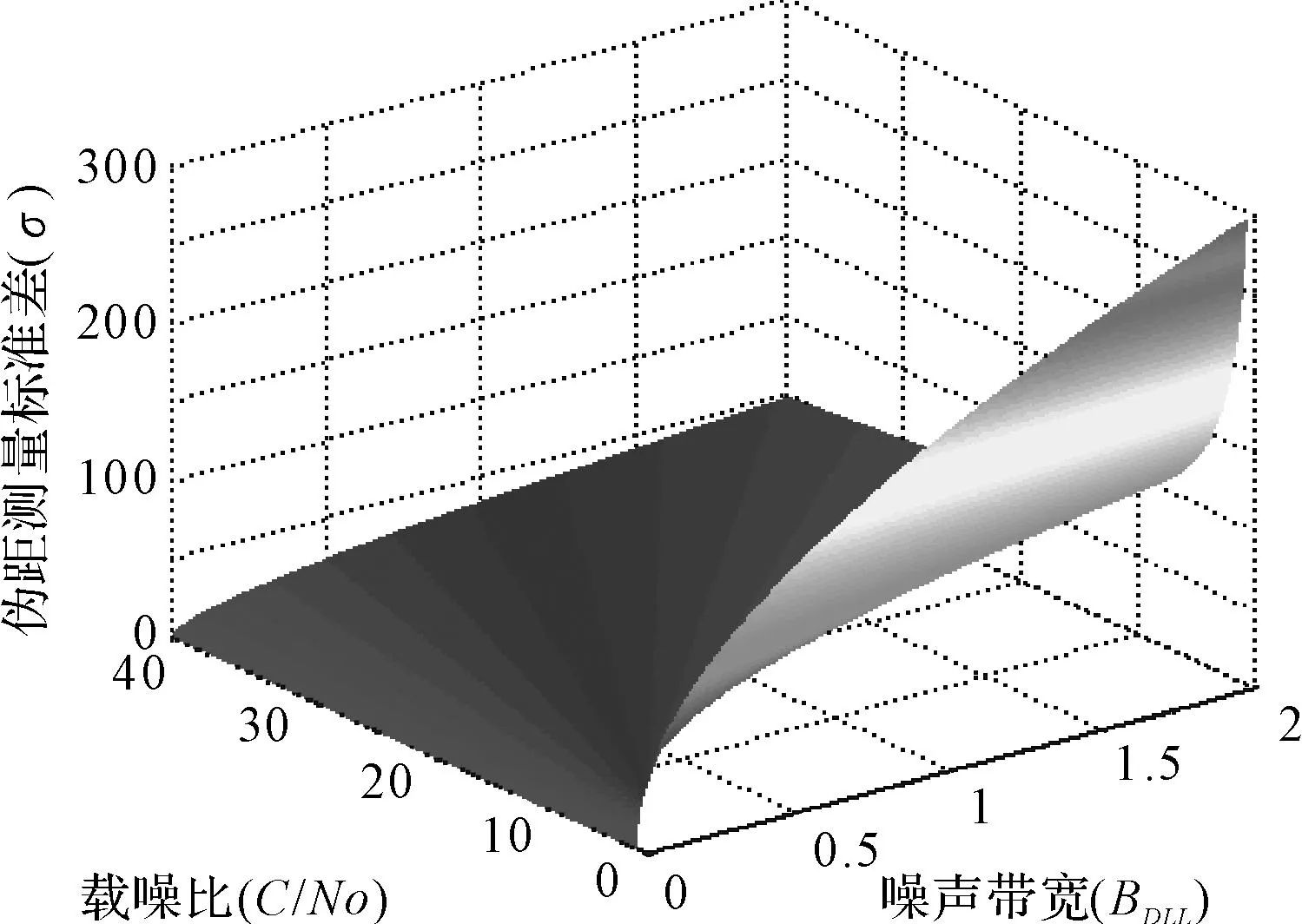
图3 接收机伪距测呈误差σpr、载噪比C/N0及噪声带BDLL关系
采用深组合模式,DLL噪声带宽BDLL允许更窄。在相同的C/N0条件下,BDLL由2Hz降低到0.01Hz,伪距测量精度提高大约9倍。
5BDS/INS深组合应用中若干技术问题
北斗卫星导航系统(BDS)已经正式具备了亚太
区域导航能力,通过GPS/INS深组合技术的研究,将深组合相关技术应用于INS与BDS的组合,拓展BDS的应用范围,提高BDS的应用能力[1,4,8~10]。
5.1深组合方案
深组合模式涉及到接收机内部结构的编排,甚至重新设计,使得组合工程化技术难度大。虽然国外已经实现了有关方案,但缺乏详细的技术细节,难以进行具体的借鉴和参考。从深组合模式信息融合、算法、仿真等技术方面入手,深入研究组合方案。
5.2数据信息融合
在深组合系统中有惯导辅助信息和北斗输出信息,在硬件确定的情况下,对其采用不同的数据融合方法,得到的效果也不一样。在研究组合数据信息融合时,注重研究分散化滤波算法,通过对信息融合不同算法的仿真,寻求系统最佳的信息融合。
5.3故障信息诊断
系统Kalman滤波器处理必须要判定来自BDS和INS的原始测量数据是否因动态或者干扰而变差,而且在分系统失效情况下,滤波器必须能切换到不同的导航模式。组合时要深入研究故障信息诊断技术,确保能对系统的各种状态做出检测,提高组合系统的可靠性。
5.4系统试验验证
BDS/INS组合系统实际应用环境比较复杂,一般难以达到理论分析或实验室所得到的理想结果。因此,各种复杂条件下的试验验证是提高系统性能的重要保证。
6结语
拓宽卫星导航的应用范围,提高接收机动态适应性、抗干扰能力等是卫星导航所寻求的目标,而卫星导航/惯性导航深组合是实现此目标的最佳选择。因此,要加强深组合模式关键技术的研究,进一步提高卫星导航定位能力。
参 考 文 献
[1] 陈思,王可东.惯性导航与卫星导航紧耦合技术发展[J].全球定位系统,2007(3):21-25.
[2] 王路,刘铭.GPS/INS组合制导技术的发展动向与分析[J].舰船电子工程,2011(2):15-19.
[3] 谢钢.GPS原理与接收机技术[M].北京:电子工业出版社,2011,7:204-207.
[4] 陈坡.GNSS/INS深组合导航理论与方法研究[D].郑州:解放军信息工程大学,2013.
[5] 丛丽,郑智毅,金天,等.INS加速度信息辅助GPS载波跟踪方法研究[J].计算机工程与设计,2012(11):4356-4361.
[6] 唐康华,吴美平,胡小平.MENS IMU辅助的高性能GPS设计[J].测绘学报,2008(2):128-134.
[7] 杨雪梅,尹鑫,刘卫新,等.INS辅助的北斗二代用户机跟踪算法分析[J].火力与指挥控制,2014(4):177-180.
[8] 周坤芳,吴晞,孔键.紧耦合GPS/INS组合特性及关键技术[J].中国惯性技术学报,2009(1):42-45.
[9] Hiliuta A, Landry R, Jr, Gagnon F. Fuzzy Corrections in a GPS/INS Hybrid Navigation System[J]. IEEE Transactions on Aerospace and Electronic Systems,2004,40(2):591-599.
[10] 蒋庆仙,田育民,孙葵.北斗/INS组合导航关键技术分析[J].全球定位系统,2010(6):56-59.
中图分类号U666
DOI:10.3969/j.issn.1672-9730.2016.01.003
作者简介:周坤芳,男,教授,研究方向:导航定位技术。
*收稿日期:2015年7月3日,修回日期:2015年8月27日
