
曲柄摇杆机构的运动分析研究
2016-03-30 19:59黄帆
科技视界 2016年1期
黄帆

【摘 要】本文介绍平面连杆机构运动分析杆组法,并针对曲柄摇杆机构的运动特性进行分析,给出了曲柄摇杆的数值参数设计方面的理论依据。
【关键词】曲柄摇杆;运动分析;急回特性
【Abstract】This paper introduces the kinematic analysis of the planar linkage mechanism, analyzes the kinematic characteristics of the crank and rocker mechanism, and gives the theoretical basis of the numerical parameters design of the crank rocker.
【Key words】Crank and rocker; Motion analysis; Quick return characteristics
0 前言
曲柄摇杆机构是一种典型的四杆机构之一,由曲柄、摇杆、连杆、机架组成的。曲柄或摇杆通过直接接触将预定的运动传给从动件。由于曲柄摇杆机构可以实现各种复杂的运动要求,而且具有结构简单紧凑的特点,所以广泛应用于各种自动化机器、仪器和装配线,例如在纺织机械、印刷机械以及一些控制系统等装置中,广泛应用着各种类型的曲柄摇杆机构。
具有急回特性的曲柄摇杆机构是常用的曲柄摇杆机构,曲柄的转动使从动件按预定的运动规律摆动。由于曲柄摇杆机构的运动特征依赖于曲柄、摇杆、连杆的长度和行程速比的类型,在常规设计中,为了获得从动件的预定输出运动(位移、速度和加速度),必须合理选择从动件的类型和机构参数后精确地设计曲柄摇杆的数值参数。
1 平面连杆机构运动分析杆组法简介
平面连杆机构的运动分析,早已有成熟的算法,其中阿氏杆组法最为简单有效。大部分连杆机构都是在基本机构上增加一个或多个常用的阿氏杆组构成的。由于阿氏杆组的自由度为零,阿氏杆组具有运动的确定性。就是说,当外部运动副的运动已知时,阿氏杆组中所有构件的运动就可以确定。因此可以预先编写一些常用阿氏杆组子程序,通过调用少数几个杆组子程序,就可以完成各种各样连杆机构的运动分析,因而被广泛接受和应用。为了论述的完整,这里对杆组法作一简要介绍。
用杆组法对平面连杆机构进行运动分析的思路是:先将机构拆成自由度为零的基本杆组和与机架相连的原动件,然后从原动件开始,逐个进行杆组的运动分析,直到完成预定的运动分析任务。对某个杆组作运动分析,是由其外部运动副的运动状态(位置、速度、加速度)求解内部运动副及组成构件的运动状态。一个构件的运动状态由其上一点和一直线的运动状态决定,由此可求出构件上任意其它点的运动。由于本文所求机构的转换机构均为Ⅱ级杆组,因此我们只对平面Ⅱ级杆组进行运动分析。
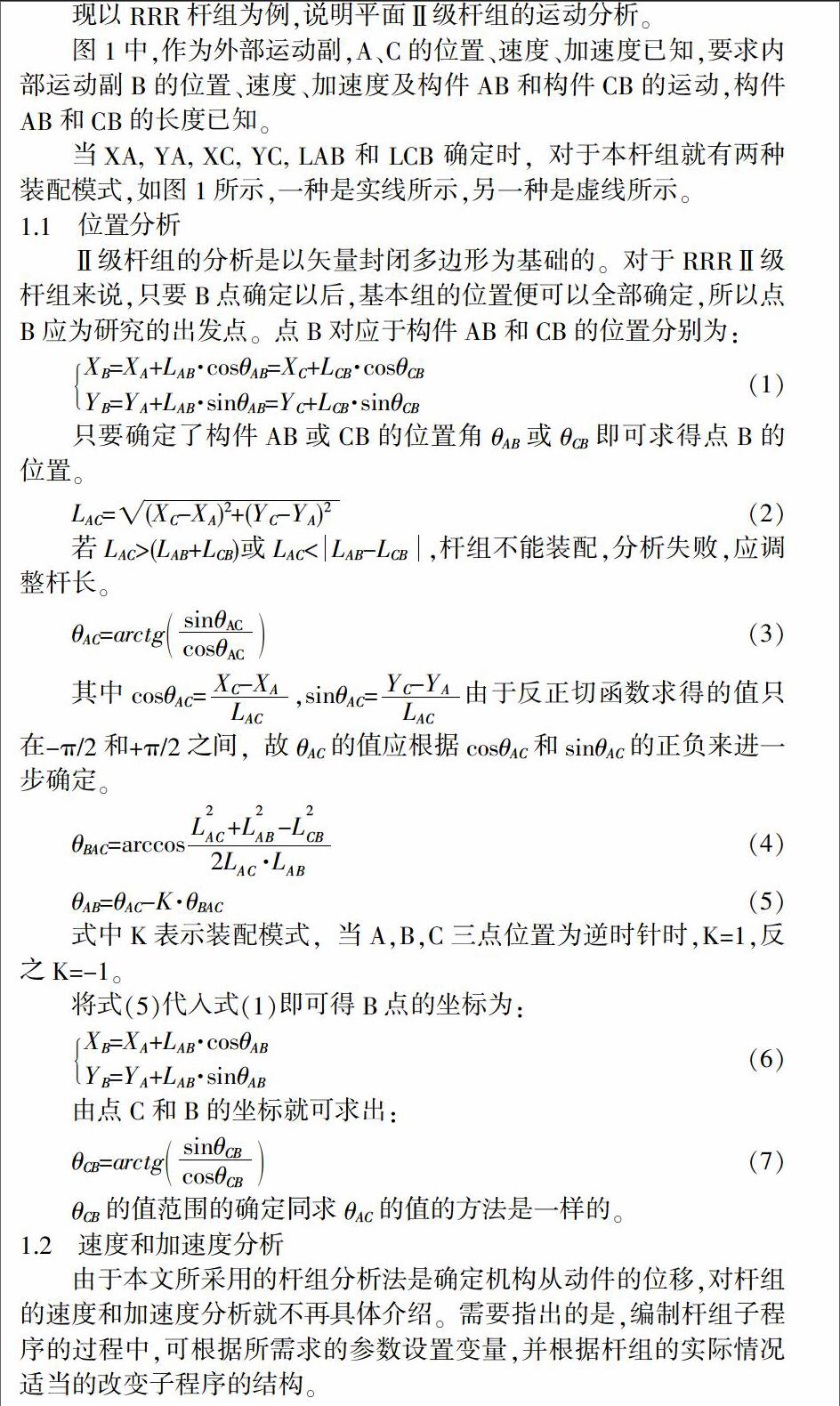
平面Ⅱ级杆组由两个构件三个低副组成,低副可以是转动副或移动副。最常用的Ⅱ级杆组为铰链二杆组RRR,如图1所示,A和C为外部转动副,B为内部转动副。名称中“R”表示转动副,处于中间的字母表示内部运动副,两端的字母表示外部运动副。
图1 RRR杆组
现以RRR杆组为例,说明平面Ⅱ级杆组的运动分析。
图1中,作为外部运动副,A、C的位置、速度、加速度已知,要求内部运动副B的位置、速度、加速度及构件AB和构件CB的运动,构件AB和CB的长度已知。
当XA, YA, XC, YC, LAB 和 LCB 确定时,对于本杆组就有两种装配模式,如图1所示,一种是实线所示,另一种是虚线所示。
1.1 位置分析
Ⅱ级杆组的分析是以矢量封闭多边形为基础的。对于RRRⅡ级杆组来说,只要B点确定以后,基本组的位置便可以全部确定,所以点B应为研究的出发点。点B对应于构件AB和CB的位置分别为:
θCB的值范围的确定同求θAC的值的方法是一样的。
1.2 速度和加速度分析
由于本文所采用的杆组分析法是确定机构从动件的位移,对杆组的速度和加速度分析就不再具体介绍。需要指出的是,编制杆组子程序的过程中,可根据所需求的参数设置变量,并根据杆组的实际情况适当的改变子程序的结构。
2 具有急回特性的曲柄摇杆机构
在工程上往往要求作往复运动的机构的从动件在工作行程内速度慢些而空回行程时速度快些,以缩短非生产性时间,提高劳动生产率,这种运动性质称为急回特性。急回特性程度用行程速度变化系数表示,是指在具有急回特性的机构中,原动件作等速运转时,从动件空回行程的平均速度与工作行程的平均速度之比值。
因极位夹角可大于90°,行程速度变化系数理论上其可趋于无穷大。可以设计出急回程度更大的机械来,以便大大提高劳动生产率,缩短非生产性时间。但同时必须考虑到实际四杆机构存在磨擦现象,所以在增大急回特性范围时,还要充分考虑到四杆机构的最小传动角不宜太小及从动件冲击现象增大等因素。
3 无急回特性的曲柄摇杆机构
对于无急回运动的曲柄摇杆机构,θ=0,K=1,在无急回特性的曲柄摇杆机构中,在满足给定的条件下,实现γmin最大值,可提高机构的传动性能。无急回特性的曲柄摇杆机构的最小传动角γmin=γ,而且曲柄与机架两次共线时传动角相等。
在无急回特性曲柄摇杆机构的设计中,并非γmin越大越好,当γmin逼近(γmin)max时,杆长增大很快,以至于到无穷大,最优传动角γmin值可以近似按下式选取:γmin=(γmin)max-10° 。
4 结语
本文论述了曲柄摇杆机构的运动特性,并针对曲柄摇杆机构的急回特性进行分析,给出了曲柄摇杆的数值参数设计方面的理论依据。由于作者本人能力和时间有限,分析还存在不足之处,有待今后进一步的研究和改进。
【参考文献】
[1]Ye Zhonghe,Lan Zhaohui,Theory of Machine and Mechanism,HIGHER EDUCATION PRESS,2001[Z].
[2]于潇雁,蓝兆辉.具有急回特性的曲柄摇杆机构的综合新探[J].机械设计与研究,2007.
[3]于潇雁,蓝兆辉,叶仲和.铰链四杆机构中RRR杆组装配模式[J].福州大学学报,2008.
[4]刘开昌.急回连杆机构的设计研究[J].济南大学学报:自然科学版,2002,6,16(2):171-173.
[5]娄建国.按K设计曲柄摇杆机构的解析法[J].绍兴文理学院学报,2002.
[6]于兴芝.不同条件下的曲柄摇杆机构设计[J].机械传动,2007.
[7]冀晓红.具有急回运动特性的曲柄摇杆机构设计[J].机械研究与应用,2008.
[责任编辑:汤静]
